
测量机器人在工程监测中的应用
2011-06-15 11:33马继国王联升
河北水利电力学院学报 2011年4期
陈 晨,马继国,王联升
(1.河北工程技术高等专科学校,河北 沧州 061001;2.大连市勘察测绘研究院有限公司,辽宁 大连 116021;3.中铁六局北京铁建公司,北京 100036)
随着我国各项建设的快速发展,各种大型工程项目的建设和大型工程建筑物越来越多,因此,对大型工程建筑物进行变形和稳定性监测就愈加重要。有关变形监测的方法随着新仪器、新技术的出现而不断发展[1]。测量机器人就是一种能代替人进行自动搜索、跟踪、识别和精确照准目标并获取角度、距离、三维坐标以及影像等信息的智能型电子全站仪[2]。文中结合大孤山露天铁矿西北帮边坡位移监测探讨了 LeicaTCA 2003智能全自动全站仪在工程建筑物监测中的应用。
1 监测网布设
大孤山露天铁矿开挖时间长,矿底深度大,底部矿岩的开采采用底层台阶破碎皮带运输法。由于受长期爆破震动及外界环境、地质条件的影响,其西北帮一段运输巷道出现了裂痕。为了矿山的安全生产,查明位移程度和原因,在矿山顶部布设了 5个基准点(见图1);在目标边坡上均匀设置了 21个目标点,在各点均设立监测桩,并安置强制对中器。
坐标系采用独立坐标系,以矿区顶部布设的 5个基准点建立边角控制网,网形如图2所示。通过于每点设站,对其余各方向进行边角同测,这样具有较多的多余观测数。控制网采用经典自由网平差法(无约束平差),以 3号点为固定点,3-2号为起算方位,经评定后各点的点位如表 1所示,中误差为 1.96 mm。
对于被监测的目标区域,按照露天矿不同梯度平台均匀设立监测桩,共 21个。这样共同组成了矿区边坡变形监测网。
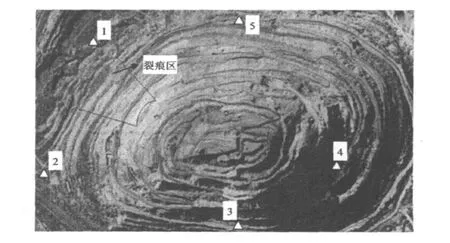
图1 矿区俯视图片及点位设置
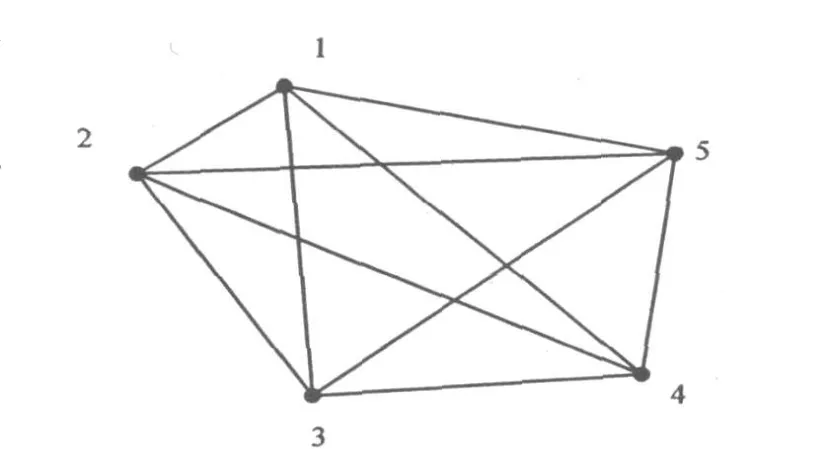
图2 矿区监测控制网
2 施测方案
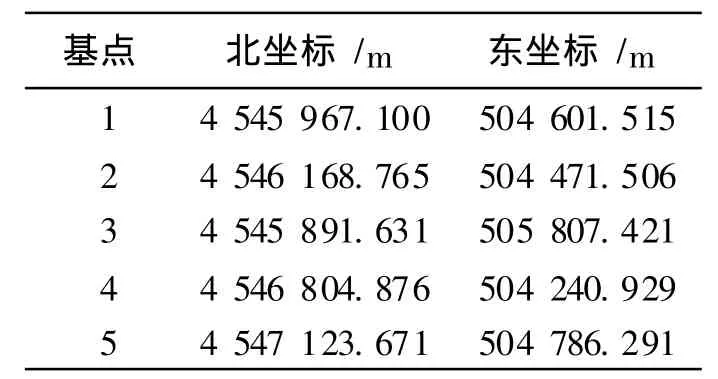
表1 平差后坐标点位
测量中执行中华人民共和国标准《工程测量规范(GB 50026-93)》,满足二等变形测量的精度要求。仪器选用徕卡 TCA2003智能全自动全站仪,配有马达驱动和 ATR功能,可以实现自动搜索学习目标并自动识别照准,自动测定测站点至目标点的距离、水平方向值和天顶距,并能同步计算出目标点相对测站点三维坐标,最后记录在PC卡或计算机内[3]。由于它不需要人工照准、读数、计算,有利于消除人为误差的影响、减少记录和计算出错的机率。用该仪器每次观测、记录一个目标点的时间约 7 s,每点观测 4个测回也仅用 30 s。一个周期观测 10个点的时间都不会超过5 min。通过观测数据的比较,可掌握建筑物在不同时刻位移的变化量。徕卡 TCA2003其角度测量精度为0.5″,距离测量精度为 1+D×10-6mm,同时支持软件二次开发功能,可为实测作业编制数据通讯程序。
用全站仪进行自动观测一般分两种控制方式。一种为通过全站仪的机载软件自动进行观测,数据存储到全站仪的内存卡中,观测完成后将数据从内存卡中读取出来进行处理。这种方式操作简单,但数据不能实时显示处理。另一种为通过数据线将电脑或智能手簿与全站仪连接,在电脑或智能手簿上安装监测软件,对全站仪进行控制,实现自动测量,并将数据直接传输到电脑或手簿中。此种方式可以及时地对数据进行处理,但是需要在电脑或智能手簿中提前安装或自行开发终端监测系统。
由于矿区环境因素的影响,将 3号点作为基准点(如图1),不仅其通视条件好,而且与目标监测区较远,距离采挖区也较远,可以减少爆破所带来的影响。
整个矿山的监测系统一共由监测目标、全站仪、控制终端 3部分组成。
①监测目标部分。在全部监测桩上安置强制对中器,在监测时安置棱镜进行多测回观测。由于棱镜数量有限,本次选用了 8个具有相同参数的棱镜。
②全站仪监测部分。采用徕卡 TCA2003智能全自动全站仪,将其安置于 3号观测点。将全站仪通过数据线与便携式电脑相连(或智能电子手薄),同时设置通讯参数、波特率 (一般设为 9600)和数据格式(ASCII)等。
③控制终端部分。采用便携式计算机或电子手簿,并利用开发的自动监测系统对全站仪进行远程控制,实时地把变形观测的数据采集并显示出来。此模块也是整个系统的核心所在。
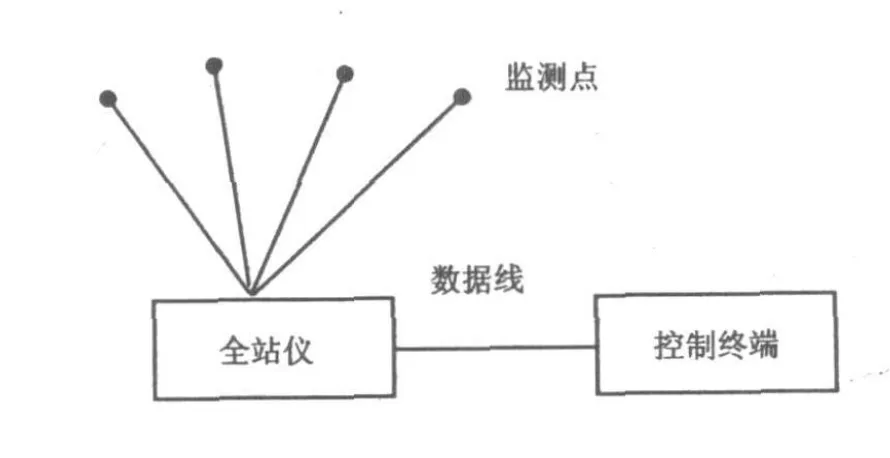
图3 监测系统组成
3 监测过程及数据处理
3.1 监测过程的实现
①限差设置。在控制终端的监测系统下设置该站测量需要符合的各项限差,包括归零差、2C互差、方向值较差、测回互差、距离限差、棱镜常数等(见表 2),这些限差在角度的测量过程中,用于实时计算、检核每次测量值,符合限差则进行下一步。
②测站设置。在该部分需要输入该基站的测站名、基站号、测回数、仪器操作者、气压、温度等。利用测站名和测站号可以在将来结果输出中清楚地分开每站的数据。
③学习设置。利用学习模式对所要观测的点进行初始观测,获取目标点的初始位置信息,以便在自动测量模式中仪器可以自动准确快速地搜索到目标点。在学习模式中,先设置目标点的个数。由于共选用 8个棱镜,目标点数应设置为 8。接着粗略瞄准目标点,然后点击学习按钮,全站仪将对目标点进行粗瞄准,并记录其每个点的概略水平角、竖直角。通过对 8个监测点位的全部学习,即完成了自动测量前的准备工作。
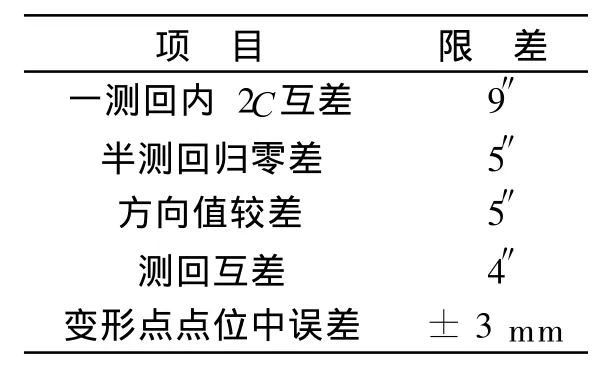
表2 测量限差表
④自动测量。在控制终端点击自动测量按钮,通过自动测量模式对监测点进行自动照准,并且全站仪将按照学习的顺序进行多测回正倒镜自动观测,同时自动检核限差要求,如出现超限数据,系统会出现提示信息并询问是否进行重测或补测。当 8个监测点 10个测回测量完毕后,进行换镜操作。为了保证精度要求,一次只换 6个棱镜,这样每次就有 2组的重复观测量。
3.2 数据处理
全部监测点位 10个测回测量完毕后,可以使用徕卡后处理软件——徕卡变形监测分析系统来进行数据的处理(见图4)。
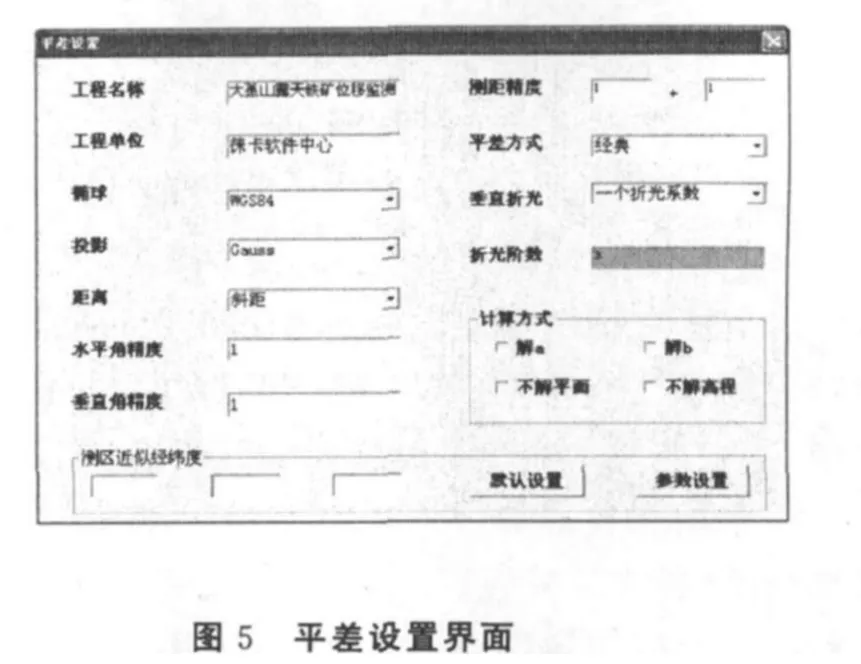
点击“变形数据管理”按钮进入项目管理并新建作业。导入本次观测的全部数据(*.OBS),然后对项目数据进行斜距改化平距。这时可以返回主界面并点击“变形监测数据分析”按钮,对平差参数进行设置,如项目信息、参考椭球、水平角与竖直角观测精度、平差方式等(见图5)。
最后,插入已知点的点号和三维坐标,点击“平差计算”按钮,就可以得到相应周期的监测点的三维坐标值。
3.3 成果分析
由于此次监测目标出现了较为明显的裂痕,设定一周左右为一个观测周期。通过对多个周期的观测数据进行汇总,采用时间序列分析法,将监测数据进行处理分析,便可以预测被监测边坡形变的发展趋势和发育速率。例如,9号监测桩其 12个周期的监测结果如表3所示,其变形曲线如图6所示。
从图6可以大致看出 9号点位由于受矿区爆破等外界各种因素的影响发生周期性位移。通过对全部 21个监测点位的总体分析,便可以得出变形最大区段以及可能造成的影响。
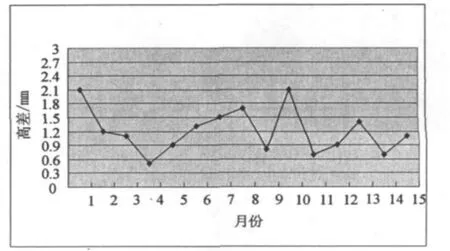
图6 第 9号点位移变化图

表3 9号监测点观测值
4 结语
文中根据实际工程项目的需要,以 Leica TCA2003全站仪为数据采集设备,利用在 Geo-COM环境下开发的自动化变形监测软件,实现了数据的自动采集、管理和分析,应用起来方便快捷。
测量机器人技术是近年来发展起来的自动化测量技术,在变形自动监测方面具有高效、快速、省时省力等诸多优势,是测绘行业发展的一个热点方向。再加之具有完备的数据处理软件功能,所以实践证明,自动全站仪变形监测系统在变形自动监测中能够发挥很好的作用。
[1]梅文胜,张正禄,黄全义.测量机器人在变形监测中的应用研究 [J].大坝与安全,2002,(5):16-19.
[2]王双洪,王斌.测量机器人在地壳形变监测中的应用[J].防灾技术高等专科学校学报,2005,7(3);38-42.
[3]张国辉.全自动全站仪滑坡监测数据的远传和处理[D].阜新:辽宁工程技术大学,2005.
猜你喜欢
煤气与热力(2022年4期)2022-05-23
水利水电科技进展(2021年6期)2022-01-07
水电站设计(2020年4期)2020-07-16
装备维修技术(2020年21期)2020-04-22
中小企业管理与科技·下旬刊(2019年8期)2019-11-09
工程与建设(2019年3期)2019-10-10
湖南畜牧兽医(2016年3期)2016-06-05
电测与仪表(2016年9期)2016-04-12
建筑工程技术与设计(2015年17期)2015-10-21
河南科技(2014年22期)2014-02-27
