基于软件无线电原理导航接收机信号解算
2011-06-13 11:58张建明
无线电工程 2011年4期
张建明
(中国电子科技集团公司第二十研究所,陕西西安710068)
0 引言
针对导航系统的特性,采用软件无线电原理进行了接收机的设计,该接收机的主要功能是完成导航系统角度参数及数据信息的解算,为飞机提供实时准确的引导信号。
软件无线电技术是现代通信技术及信号处理中重要的研究领域,其核心思想是将天线接收到的射频信号尽可能数字化,将模拟信号变换成适合于数字信号处理的数据流,然后通过软件算法来完成各种功能。由于具有良好的开放性和可编程性,采用软件无线电原理对接收机进行了设计,并且对设计过程进行了仿真。
1 系统功能及信号特性
系统分为地面设备和机载设备,地面设备由方位制导设备、仰角制导设备和基本数据传送系统组成。数据传输系统向飞机提供用于精密进近和着陆的必要基本数据和辅助数据信息。基本数据包括地面设备识别、信号覆盖范围、可用最低下滑道、设备性能级别和所用频道等与着陆有关的数据,而辅助数据一般包括地面设备的安装状况、航空气象情报、跑道状况和其他辅助信息。
系统工作频率为C波段,分为200个波道,波道间隔为300 kHz。地面台信号的发射采用了时分多路复用技术,全部角度制导信息和数据都在同一频率上发射,不同功能的信号都占有自己的发射时隙,在每个发射时隙前部用差动相移键控(DPSK)调制的前导码来区分不同的模块。下面以角度制导功能为例说明信号特性,角度制导功能包括前导信号、扇区信号和“往”、“返”扫描波束等部分组成。
①前导信号。前导信号包括3个部分:载波截获段、接收机基准时间码和功能识别码,全部信号在±42°(对于高速方位制导功能)的比例覆盖区中发射,载波截获段中有段同步头,它是一段未经调制的纯载波,接着是用差分相移键控(DPSK)调制的编码。差分相移键控是利用前后码元之间载波相位的相对变化来传递信息的一种编码方式。接收机基准时间码即同步码,采用5位Barker码,其固定形式为11101,其功能是使接收机在每个功能段都产生一个基准时间,各个功能格式中的其他码均严格按照基准时间而产生;
②扇区信号。对于不同的功能来说,扇区信号的内容也有所不同,对方位制导功能而言,由机载天线选择脉冲、覆盖区外指示(OCI)信号和接收处理器检查脉冲组成;
③扫描波束。地面台天线产生一个方向较窄的扇形波束,在比例覆盖区内进行往返扫描,通过接收机得到一对“往”、“返”扫描脉冲,用于角度的测量。对方位台而言,扫描波束在水平范围内顺时针和逆时针扫描,对仰角台则相对于向上和向下扫描。
2 基于软件无线电接收电路的设计
2.1 电路组成
本电路主要由射频接收前端、中频电路、数据解调、幅度解调模块和信号处理等模块组成。接收机原理框图如图1所示。
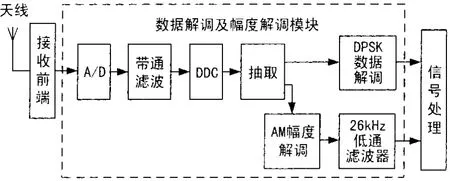
图1 接收机原理
天线接收到的地面设备发射信号,经低噪声放大和混频等电路后,把C波段信号下变频为一固定频率的中频信号,中频信号经过A/D采样电路变为数字信号。采样后的数字信号经带通滤波处理后分2路输出,一路信号通过DDC数字下变频后进行DPSK数据的解调,输出帧同步信号和基本数据字及辅助数据字,另一路信号进行AM幅度解调,解调出信号包络,最后通过信号处理模块,解算出所需要的角度信息。
2.2 采样频率的确定
中频直接采样后的信号频谱是原信号频谱以采样速率fs为周期的延拓。为了使频谱不重叠,则信号作周期延拓时应满足一定的条件。
对于本接收机来说,中频频率f0=70 MHz,信号带宽BW=120 kHz,根据带通采样定理,选取采样频率fs=40MHz。
2.3 数字下变频及抽取电路
对A/D采样后的数字信号先进行带通滤波,经过数字下变频(DDC),一路进行数字信号解调,另一路进行幅度解调。
数字下变频技术是软件无线电的核心技术之一,其根本任务是实现从高数字中频到低数字中频或基带信号的变换。A/D数字化后的中频信号与数字本振cos(ω0n)相乘,经过滤波处理,从而实现了将信号由高中频搬到低中频或基带的变频功能。
带通滤波后的信号下变频为800 kHz信号,为了减小后续数字信号的处理压力,对采样率为40MHz的800 kHz信号进行抽取。
2.4 数字信号的解调
数字信号解调相对比较复杂,包括载波恢复与跟踪、帧同步信号的提取、相干解调和数据信号的抽样判决等电路。
2.4.1 载波恢复与跟踪
载波提取有平方环和costas锁相环等几种,平方环的工作频率是载波频率的2倍,当工作频率较高时,平方环法不易实现。这里采用数字costas锁相环技术实现载波恢复与跟踪,并且根据环路锁定时间、环路带宽和采样频率等参数可设计出所需要的环路滤波器。costas环原理框图如图2所示。
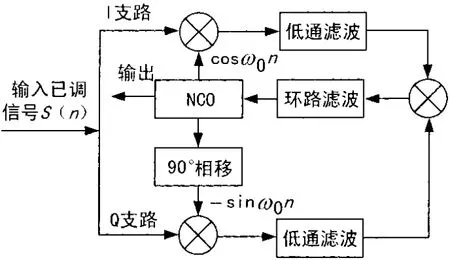
图2 costas环原理
2.4.2 相干解调及码变换
解调器的任务是恢复出传输的原始信息,在DPSK编码中,数字信息是用前后码元已调信号的相位变化来表示的,在输入相同信噪比的情况下,虽然相干解调比非相干解调实现起来相对复杂一些,但相干解调的误码率比非相干解调的误码率要低,为了尽可能提高系统的测试精度,在设计中采用相干解调方式来实现DPSK信号的解调。
2.4.3 帧同步信号的提取
为保证数字解调和后续信号处理,必须有一个同步系统。在本系统中,采用5位巴克码实现每一功能段的同步。巴克码组具有尖锐单峰特性的自相关函数,在求它的自相关函数时,除了在时延j=0的情况下,序列中的全部元素都参加相关运算外,在j≠0的情况下,序列中只有部分元素参加相关运算,其表达式为:
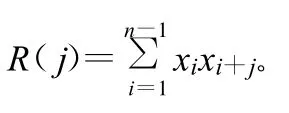
巴克码识别器输出同步脉冲表示一帧的开始,作为每一功能段的同步信号。
2.5 幅度解调
为了保证解调的效果,幅度解调采用数字正交解调的方法,这种方法具有较强的抗载频失配能力,即参考信号与输入信号载波之间允许有一定程度的偏差,并且不要求严格的同频同相。
设输入信号为:S(n)=A(n)cos(ωcn+φ0)。式中,A(n)=A0+m(n),m(n)为幅度调制信号。
对信号正交分解后的同相分量和正交分量取模得:A0+m(n),减去直流分量A0就可得调制信号m(n)。
2.6 角度的测量
角度的测量基于时基扫描波束技术,接收机在接收到“往”扫和“返”扫2次扫描波束后,测定其时间差,这个时间差值的大小与飞机在空中相对于跑道的角位置有直接关系,由此得到飞机在空中的角位置。
式中,θ为方位(或仰角)制导角度值(°);t为任意进近角时飞机接收到“往”和“返”脉冲之间的时间差;T0为以零角度进近飞机时接收到“往”和“返”脉冲之间的时间差;v为波束扫描速率,这里为20 000°/s。
以高速方位为例,此时最大扫描角度为-42°~+42°,往返扫描2次经过中心0°之间的时间T0=4.8 ms,则

3 MATLAB仿真试验
为了分析系统解调的性能及角度解算的精度,采用MATLAB语言对信号解算进行系统仿真,仿真分为模拟信号的产生、中频采样、数字下变频及信号抽取、数据解调、幅度解调、角度信息解算等几部分。
3.1 信号的产生
模拟信号为:

式中,数字中频fc=70 MHz±2 kHz;采样频率fs=40 MHz;φ为产生的随机相位;am(n)为基带幅度调制信号。
由于仰角功能段中既有数据信息,又包含角度信息,同时相对于方位功能段时间长度略短,有利于减小仿真时间,这里选取仰角功能段作为所需要的模拟信号。仰角功能的角度设为10.000°,中频信号与标准信号频偏为2 kHz,中频信号输出信噪比设为30 dB,采样后的信号如图3(a)所示。
3.2 中频采样及数字下变频
载波为70MHz的信号经采样频率40 MHz的信号采样,经带通滤波后输出载波频率为800 kHz的信号。同时,为减小后续电路的处理压力,此时将采样率为40MHz的800 kHz数字信号进行10倍抽取,最终输出采样率为4MHz的信号进行数据解调和角度的解算。
3.3 数据信号的解调
3.3.1 同步
同步在信号解算中起着至关重要的作用,针对信号特性,分为载波同步和帧同步2个部分。
①载波同步信号的解算。由于数据信号为DPSK调制,在相干解调过程中,需要与一个接收载波同频同相的本振信号。这里进行科斯塔斯环算法进行载波信号的提取。由仿真可以看出:当输入频偏为2 kHz时 ,经过500 μ s后,恢复后的载波与输入信号的载波频率和相位误差都非常小,满足数据信号的相干解调;
②帧同步信号的解算。通过帧同步信号的解算,可以对基带信号进行正确的抽样判决,最终解算出信号所携带的数据信息。这里采用5位巴克码信号作为接收机的帧同步码,与标准巴克码进行相关运算后的峰值作为接收机信号解算的时间基准,如图3(b)所示。
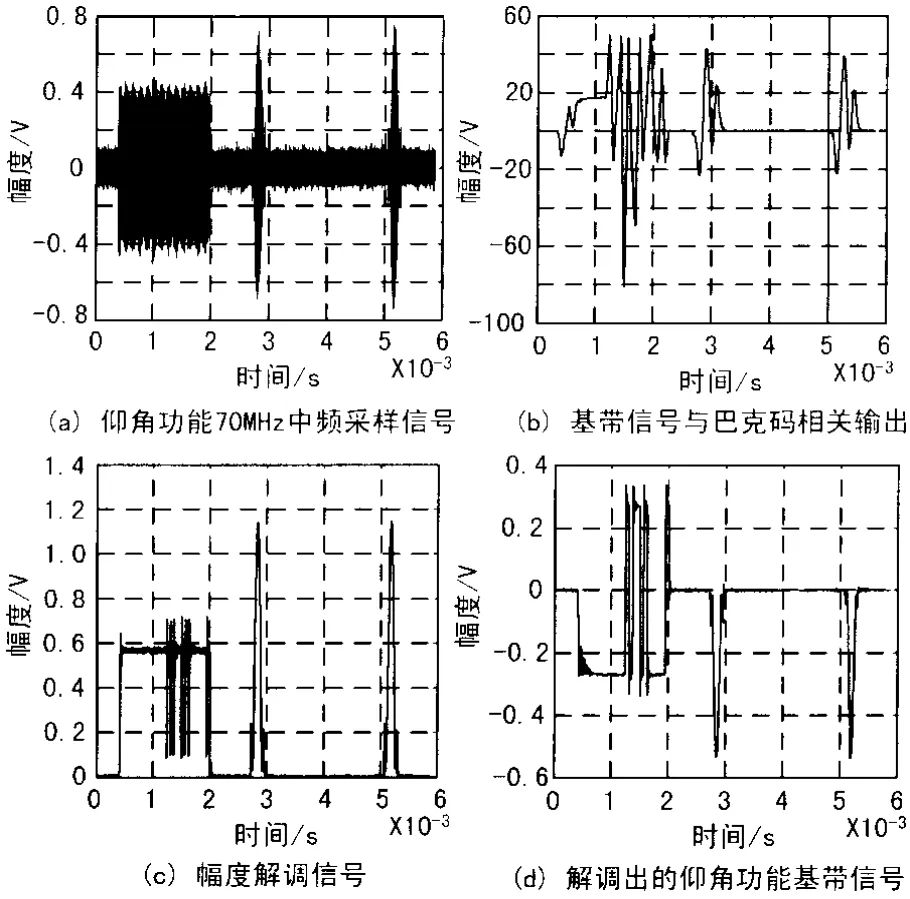
图3 仿真结果输出波形
3.3.2 基带信号与数据信息的解算输出
相干载波解算完成后,与输入信号进行相干解调即可解调出接收信号所携带的基带信息,如图3(d)所示。经帧同步信号的解算,确定了整个接收机的基准,通过抽样判决及码变换电路最终得到巴克码后所携带的数据信息为1100001,与仰角的功能识别码相同,表明数据解算正常。
3.4 角度信息的解调
幅度解调如图3(c)所示,通过测量2个扫描波束的时间就可得到具体的仰角数值,经过多次仿真后发现,当输入中频信号信噪比大于30 dB时,所测得的角度在±0.005°范围内变化,满足设计要求。
4 结束语
由仿真结果可以看出,信号解调方案可行。为接收机各功能模块的指标分配及其参数的确定提供了依据。另外,经多次仿真,发现随着输入信号信噪比的下降,角度解调误差也随之增大。
上述只是一些功能性仿真,由于实际信号比较复杂,有很多细节方面还考虑不周,需在今后的具体工作中不断改进。
[1]周其焕,魏雄志,崔红跃.微波着陆系统[M].北京:国防工业出版社,1992.
[2]樊昌信.通信原理[M].北京:国防工业出版社,2001.
[3]吴大正.信号与线性系统[M].北京:高等教育出版社,1993.
[4]杨小牛,楼才义,徐建良.软件无线电原理与应用[M].北京:电子工业出版社,2001.
[5]苏晓生.掌握MATLAB 6.0及其工程应用[M].北京:科学出版社,2002.
猜你喜欢
航天电子对抗(2021年2期)2021-05-31
时代农机(2020年3期)2020-12-23
初中生世界·九年级(2020年2期)2020-04-10
电子技术与软件工程(2020年23期)2020-03-15
电子制作(2018年16期)2018-09-26
吉林大学学报(理学版)(2018年2期)2018-03-27
科技视界(2016年15期)2016-06-30
火控雷达技术(2016年3期)2016-02-06
现代防御技术(2014年1期)2014-07-10
现代电子技术(2009年9期)2009-06-25