三维激光扫描仪井下安全监测技术
2011-06-12 07:57王利岗
有色金属(矿山部分) 2011年4期
张 达,王利岗
(北京矿冶研究总院,北京 100070)
引言
留矿法、空场法等矿山资源开采方法的使用使我国的许多矿山形成大量的采空区,如甘肃厂坝铅锌矿、广东大宝山矿、广西大厂铅锌矿、黑龙江西林铅锌矿、铜陵狮子山铜矿等。而且,长期以来许多民营矿山私挖乱采形成的大量空区群形态不一、错综复杂。另外,由于许多私营矿山的开采没有经过正规设计或设计资料不全、遗失等,无法确定这些采空区的位置和具体边界。受地压及爆破震动等影响,这些未经处理的采空区会导致矿山开采状态恶化,引起矿柱严重变形,相邻采场及巷道维护难度加大,发生大面积冒落及地表塌陷等,这些已经成为目前影响矿山生产安全的重要危害源之一[1]。因此,科学地探明井下采空区的条件状态和空间形状,为空区安全治理和资源回采提供准确的设计依据,已成为保障矿区人民生命财产安全和矿山企业安全生产的迫切需要[2]。
目前,对于采空区的探测,通常是首先查阅采矿设计等相关资料并进行现场实地调查,然后利用现有的各种物探方法进行探测,最后以钻孔探测的方法进行验证。这些方法不仅成本高,而且只能得到钻孔处的点数据。近年来新兴的地球物理探测方法显示出较强的地质信息揭示能力,主要有探地雷达法[3]、高密度电法[3-4]和三维激光扫描法[5]等,其中三维激光扫描法具有探测精度高、探测速度快、对周边环境影响小等一系列优点,具有广阔的应用空间。运用三维激光扫描这一新技术,可以精密测量空区的空间性状和形态,通过实时数据分析,可以对井下空区变形等进行监测,为低成本、快速、准确安全地监测地下空区提供了可能。
1 空区三维激光扫描仪原理
三维激光扫描仪是一种集成多种高新技术的新型三维坐标测量仪器,采用非接触式高速激光测量方式,以点云形式获取被测对象表面的阵列式几何图形的三维数据,其工作原理如图1所示。

图1 三维激光扫描仪的测量原理
其核心技术为激光雷达技术(Laser Detect and Ranger,Ladar),这是一种先进的主动传感方法,它采用激光作为传感的载体,通过发射受控制的激光来照射被测目标,然后接收被测目标的后向散射,根据激光的往返时间或者相位差来精确测定距离信息,即:

其中:s为待测距离,c为光速,t为激光的往返时间,而Φ为相位差。
采用相位差法能够达到高的测量精度,但需要好的反射光才能够测量,一般需要专用的合作目标(如激光跟踪仪采用专用靶球),在空区监测应用中难以使用。
目前三维激光扫描仪主要采用TOF脉冲测距法(Time of Flight),即计算激光的往返时间,这是一种高速激光测时测距技术。采用脉冲测距法的三维激光点坐标计算方法如下:
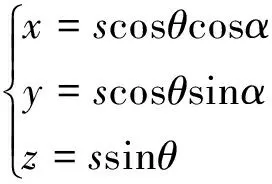
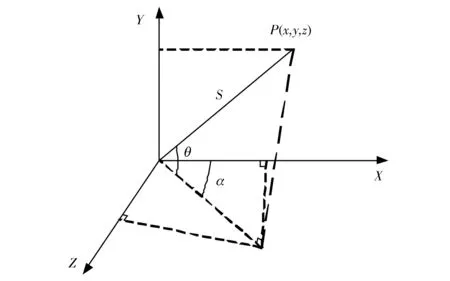
图2 采用脉冲测距法的三维点坐标
其中,s为三维激光扫描仪通过脉冲测距法得到的距离测量值,α和θ分别为由角度编码器控制并同步测量的每个激光脉冲的轴向扫描角度测量值和径向扫描角度测量值。三维激光扫描测量一般使用扫描仪内部的坐标系统,为三维立体坐标系,默认仪器中心位置坐标为(0,0,0)。
三维激光扫描测量仪在开始工作之前,会依据补偿器自动设定初始位置,在已知仪器中心点坐标(x0、y0、z0)和仪器初始化方位θ(仪器初始化后初始方位与用户坐标系中北方位夹角)的情况下,通过平移、旋转,把观测点的坐标数据换算至用户坐标系统:
(Xn、Yn、Zn)为用户坐标系中各测点的坐标。
每次观测得到的空区大量观测点的坐标数据以及对应每个测点的激光反射率数据称之为点云数据。利用网格技术将点云坐标连接成曲面,就形成了观测空区的三维图像。当进行多期观测时,就可以通过对多期图像的变化分析求得空区的变形,当相邻两期观测的空区图像发生局部或大范围变化时,可以推断期间发生了岩壁垮落。
2 井下空区三维激光扫描仪及其特点
2.1 CMS空区监测系统
2.1.1 系统介绍和组成
20世纪90年代初,空区监测系统CMS(Cavity Monitoring System)由加拿大Noranda 技术中心和Optech公司共同研发,目前已经在全球各大矿山广泛应用,并且已成为矿业发达国家地下采场和空区监测的重要手段,尤其是在人员无法进入的危险空区中,利用CMS可以进行有效地测量和监测。
CMS使用时,首先需将CMS放置在空区内的某一固定位置,然后对空区进行全方位扫描,采集空区边界的三维点坐标(X,Y,Z)并储存于CMS的内置存储单元中。经过数据转换后,可将坐标数据导入矿山专业软件(如SURPAC, DATAMINE,VULCAN等) 生成采场或空区的三维模型。CMS体型较小,可通过直径20 cm 左右的钻孔将激光头伸入到危险空区中进行探测,而操作人员则可以通过手持终端设备在安全的位置进行遥控操作。
2.1.2 CMS 原理及监测过程
使用CMS对空区进行测试前一般需对空区周边现场进行安全检查,尤其是操作人员需要进入的场地,确保人员的安全。CMS仪器为模块化组件,安装相对比较简单。安装时,首先将激光扫描头固定在碳纤维材质的支架上,然后将它稳固安装在空区的某一位置,该位置应尽量能扫描到空区的所有角落 (如图3所示)。

图3 CMS的操作方式
扫描结束后,需要对CMS采集到的数据进行处理,主要分3个步骤:
1)采用CMS激光扫描获取空间点云数据,通过数据传输线从控制箱接收扫描到的数据,控制箱将点云数据以无线方式发送至手持终端,然后再将手持终端上的点云数据下载到后期数据处理计算机中;
2)点云数据被保存成“txt”格式的文本文件,一个点数据包括一个距离值和两个角度值,采用系统自带的软件CMS PosProcess将文本文件转换为通用格式文件,这样就可以通过CAD软件或矿山专业软件(如SURPAC、DATAMINE等)处理并使用;
3)通过采用CMS专用的数据处理软件QVOL处理经过转换的点云数据,生成空区的三维图形。通过3D网格获得任何方向上的任意空区剖面,并自动计算空区体积和剖面面积。
2.2 C-ALS系统
2.2.1 系统介绍和组成
C-ALS(Cavity Auto Scanning Laser System)最早于1996年进入市场,是世界上第一款能通过地面上钻孔对地下空区进行扫描的装置,该仪器的性能已在很多条件恶劣的地下测量实践中得到了验证,并广泛应用于全球各相关行业。空区激光自动扫描系统(C-ALS)包括硬件和软件两大部分。硬件部分包括探头、钻孔摄像头、标准加长件、地面控制装置、Boretrak探杆、绞架、通信电缆以及搬运箱等。其中Boretrak探杆是为了在磁性区域配置使用C-ALS而专门设计的,因为在磁性区域无法通过使用指南针来决定探头朝向,在这种场合下,Boretrak探杆将为C-ALS提供最精确和稳定的定位方式[6]。C-ALS系统组件见图4。
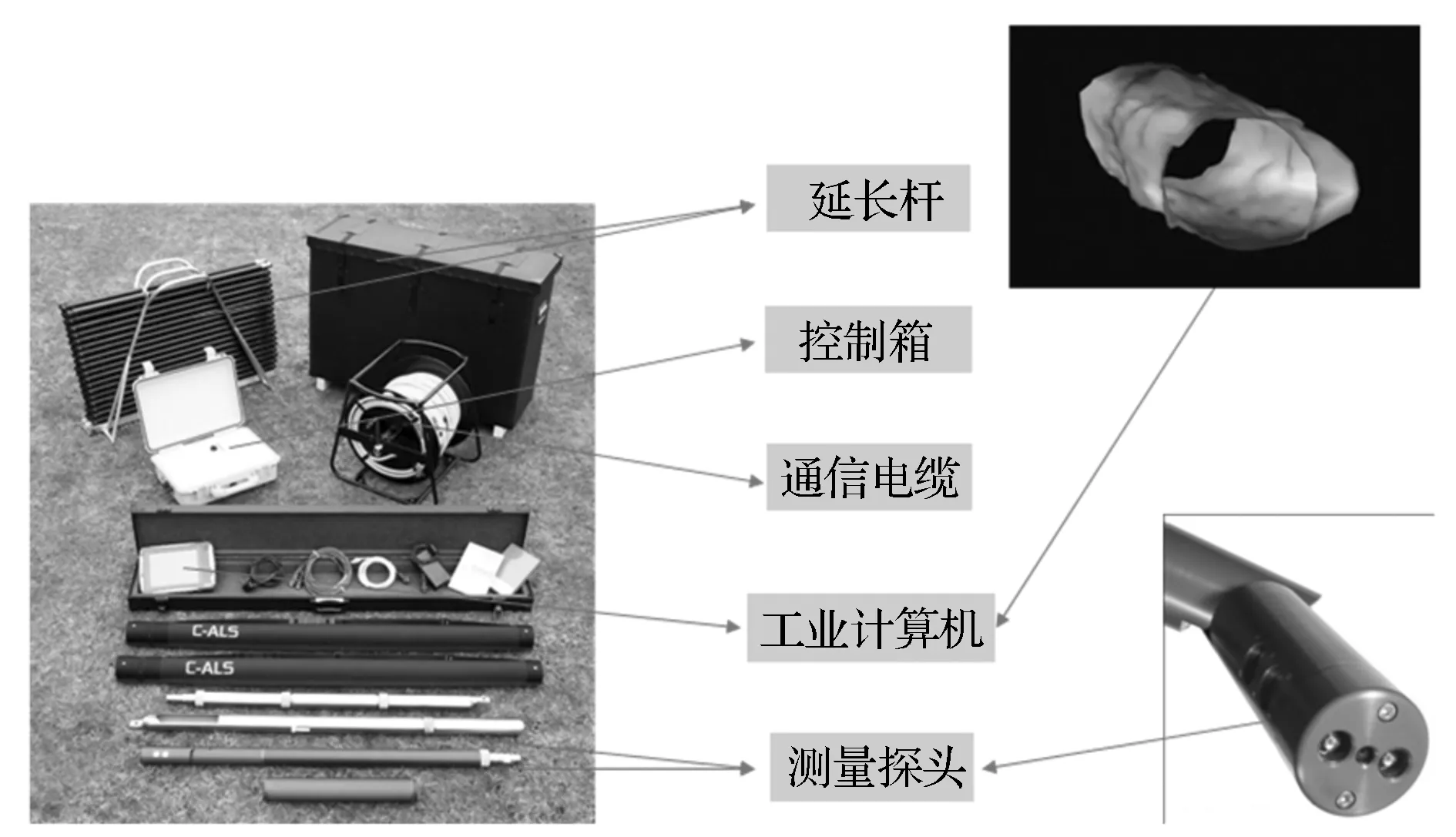
图4 C-ALS系统组件
软件部分主要是与C-ALS系统配套的远程控制软件C-ALS Control Software,其操作界面如图5所示。

图5 C-ALS控制软件
2.2.2 C-ALS系统原理及监测过程
C-ALS系统的工作原理是根据激光的射出角度和探测距离值进行定位,激光从光源发射到某个目标表面并反射回来,用高频数字电路测定其经历的往返时间,并以此来计算光源和目标之间的距离,并通过角度编码器等部件测定激光头转过的角度。空区激光自动扫描系统(C-ALS)依靠无线终端控制扫描头采集数据,通过通信电缆传输到控制软件中进行数据转换和处理,生成空区的三维模型,也可以将数据导入SURPAC、VUL2CAN、DATAMINE等专业矿山数据处理软件中,进行各种数值计算,并作为采矿设计和稳定性分析的依据,其工作流程见图7。

图7 三维激光扫描顺序
3 国内三维激光扫描技术的发展
目前国内在三维激光扫描测量技术尤其是硬件技术方面的研究还相对落后,但也有了一些初步成果[7]。早在20世纪90年代,中国科学院遥感应用研究所的李树楷教授主持研究了国内第一台机载线扫描原理样机,目前正在进一步改进和完善。武汉大学李清泉教授在2000年主持开发研制了地面激光扫描系统,但没有集成定向系统,目前主要用于堆积测量。目前,国内还没有成熟的三维激光扫描硬件系统,而国外三维激光扫描测量系统的价格依然非常昂贵。
国内针对矿山应用的三维激光扫描技术发展起步较晚,目前还停留在以使用国外相应产品为主的应用层面上,具有自主知识产权的井下空区三维激光扫描仪更是难觅踪迹。2008年,为了满足国内矿山行业日益增强的对三维激光扫描技术的应用需求,北京矿冶研究总院申请并成功实施了国家863计划重点项目《千米深井地压与高温灾害监测技术与装备》中的课题《深井空区大变形及岩壁垮落激光扫描智能化监测技术与装备》,针对井下空区变形监控等矿山应用自主研发了具有我国自主知识产权的井下空区变形监测三维激光扫描仪,该项目紧密结合我国矿山企业对井下空区变形精确监测和安全状态获取这一重要需求,广泛调研国内外三维激光扫描技术发展现状,借鉴已有技术模式,创造性地提出了变步距自适应空间分辨率扫描、扫描立方插值,补洞及匹配等三维激光扫描的关键技术,相对于国外同类产品,该项目研发的井下空区三维激光扫描仪具有全自动操作、探测距离远、探测精度高、探测模式丰富、产品成本低等特点。目前该项目已经完成了产品试制,井下空区现场测试也正在紧锣密鼓地进行,已经取得了一定的成果,同时,产品也在进一步进行改进和产品化定型,该系统的成功研究将填补国内空白,必将极大促进国内井下空区监测技术的发展,同时也会提高国内有关三维激光扫描测量技术的研发水平,促进这一技术在其他相关领域的应用和发展。
4 三维激光扫描技术在井下安全监测中的发展趋势和展望
三维激光扫描仪的井下空区变形测量和安全监测应用是三维激光扫描技术的一种特定行业应用,其发展应与矿山行业的特点紧密结合,小型化、便携式、远距离、高精度、坚固可靠等是该项技术在矿山井下安全监测应用中的发展趋势。
三维激光扫描测量技术为矿山采空区信息的获取等应用场合提供了精确可靠的可视化数据,将空区体积、空区实际边界、贫化损失等空区重要参数用具体的指标做表征,并且可以对空区岩壁垮落量等做精确计算,改变了以往靠主观经验估算的状况,是井下空区安全监测的新兴技术和重要手段。随着矿山信息化的快速发展,三维激光扫描仪作为三维激光扫描技术的载体,必将在矿山井下安全监测中发挥越来越重要的作用。
[1]李庶林. 论我国金属矿山地质灾害与防治对策[J]. 中国地质灾害与防治学报, 2002, 13 (4) : 44-48.
[2]刘敦文,古德生,徐国元. 地下矿山采空区处理方法的评价与优选[J]. 中国矿业, 2004, 13 (8) : 52-55.
[3]黄仁东,徐国元,刘敦文. 金属矿隐患空区探测技术综合分析[J]. 矿业研究与开发, 2006, 26 (z2) : 82-86.
[4]李夕兵,李地元,赵国彦,等. 金属矿地下采空区探测、处理与安全评判[J]. 采矿与安全工程学报, 2006, 23 (1) : 24-29.
[5]过 江,罗周全,邓 建,等.三维动态空区监测系统CMS在矿山的应用[J].地下空间与工程学报, 2005, 1(7):994-996.
[6]Measurement Devices Limited, C-ALS DRAFT MANUAL V4.0, 2005.
[7]过 江,古德生,罗周全. 金属矿山采空区3D激光探测新技术[J].矿冶工程,2006,26(5): 16-19.
猜你喜欢
交通世界(2022年27期)2022-10-17
现代仪器与医疗(2022年2期)2022-08-11
有色金属(矿山部分)(2022年2期)2022-07-13
资源信息与工程(2021年5期)2022-01-15
新疆钢铁(2021年1期)2021-10-14
神剑(2021年3期)2021-08-14
昆钢科技(2021年2期)2021-07-22
当代工人·精品C(2020年1期)2020-05-20
阳光(2020年5期)2020-05-06
中国动物保健(2015年4期)2015-10-21