三相异步电动机的起动和制动方法
2011-06-02 01:33炎黄职业技术学院信息工程系雷时荣
电子世界 2011年15期
炎黄职业技术学院信息工程系 雷时荣
引言
电动机的起动是指电动机接通电源后,由静止状态加速到稳定运行状态的过程。三相异步电动机除了运行于电动状态外,还时常运行于制动状态。
运行于电动状态时,Tem与n方向相同,Tem是驱动转矩,电动机从电网吸收电能并转换成机械能从轴上输出,其机械特性位于第一或第三象限。运行于制动状态时,Tem与n方向相反,Tem是制动转矩,电动机从轴上吸收机械能并转换成电能,该电能或消耗在电机内部,或反馈回电网,其机械特性位于第二或第四象限。
本篇将分别介绍笼型异步电动机和绕线转子异步电动机的起动方法,异步电动机的能耗制动、反接制动和回馈制动方法。
1.三相笼型异步电动机的起动
笼型异步电动机的起动方法有两种:直接起动和降压起动。下面分别进行介绍。
1.1 直接起动
直接起动也称全压起动。起动时,电动机定子绕组直接接入额定电压的电网上。这是一种最简单的起动方法,不需要复杂的起动设备,但是,它的起动性能恰好与所要求的相反。即:
1.1.1 起动电流Ist大
对于普通笼型异步电动机,起动电流倍数kI=Ist/IN=4~7。起动电流大的原因是:起动时,n=O,s=1,转子电动势很大,所以转子电流很大,根据磁动势平衡关系,定子电流也必然很大。
1.1.2 起动转矩Tst不大
对于普通笼型异步电动机,起动转矩倍数kst=Tst/TN=1~2。
起动时,起动电流大而起动转矩不大,可以从机械特性物理表达式
Tem=CTΦOI2'cosφ2来说明:
首先,起动时的转差率(s=1)远大于正常运行时的转差率(s=O.O1~O.O6)。
起动时转子电路的功率因数角φ2=ar-ctan(sX2’)/(R2’)很大,转子的功率因数cosφ2很低(一般只有O.3左右),因此,起动时虽然I2'大,但其有功分量I2'cosφ2并不大,所以起动转矩不大。
其次,由于起动电流大,定子绕组漏抗压降大,使定子绕组感应电动势E1减小,导致对应的气隙磁通量Φ减小(起动瞬间Φ约为额定值的一半),这是造成起动转矩不大的另一个原因。
通过以上分析可见,笼型异步电动机直接起动时,起动电流大,而起动转矩不大,这样的起动性能是不理想的。过大的起动电流对电网电压的波动及电动机本身均会带来不利影响,因此,直接起动一般只在小容量电动机中使用,如7.5kW以下的电动机可采用直接起动。如果电网容量很大,就可允许容量较大的电动机直接起动。若电动机的起动电流倍数kI满足于电动机容量与电网容量的下列经验公式:
kI≤1/4[3+电网容量(kV•A)/电动机容量(kW)]
则电动机便可直接起动,否则应采用下面介绍的降压起动方法。
1.2 降压起动
降压起动的目的是限制起动电流。起动时,通过起动设备使加到电动机上的电压小于额定电压,待电动机转速上升到一定数值时,再使电动机承受额定电压,保证电动机在额定电压下稳定工作。下面介绍两种常见的降压起动方法。
(1)Y-△降压起动
Y-△降压起动,即星形——三角形降压起动,只适用于正常运行时定子绕组为三角形联结的电动机。起动接线原理图如图1所示。
起动时先将开关S2投向“起动”侧,将定子绕组接成星形(Y联结),然后合上开关S1进行起动。此时,定子每相绕组电压为额定电压的1/√3,从而实现了降压起动。待转速上升至一定数值时,将S2投向“运行”侧,恢复定子绕组为三角形(△)联结,使电动机在全压下运行。
设电动机额定电压为UN,短路阻抗为ZS,由简化等效电路可得:
Y联结时的起动电流为IstY=UN/√3ZS
△ 联结时的起动电流(线电流),即直接起动电流为Ist△=√3UN/ZS
根据Tst∝U12,可得起动转矩减小的倍数为:
可见,Y-△降压起动操作方便,起动设备简单,应用较为广泛,但它仅适用于正常运行时定子绕组作三角形联结的电动机,因此作一般用途的小型异步电动机,当容量大于4kW时,定子绕组都采用三角形联结。由于起动转矩为直接起动时的1/3,这种起动方法多用于空载或轻载起动。
(2)自耦变压器降压起动
这种起动方法是通过自耦变压器把电压降低后再加到电动机定子绕组上,以达到减小起动电流的目的。自耦变压器一般有三个分接头可供选用,其接线原理图如图2所示。
起动时,把开关S2投向“起动”侧,并合上开关S1,这时自耦变压器一次绕组加全电压,而电动机定子电压为自耦变压器二次抽头部分的电压,电动机在低压下起动。待转速上升至一定数值时,再把开关S2切换到“运行”侧,切除自耦变压器,电动机在全压下运行。
2.三相绕线型异步电动机的起动
三相笼型异步电动机直接起动时,起动电流大,起动转矩不大;降压起动时,虽然减小了起动电流,但起动转矩也随电压的平方关系减小,因此笼型异步电动机只能用于空载或轻载起动。
绕线转子异步电动机,若转子回路串入适当的电阻,既能限制起动电流,又能增大起动转矩,同时克服了笼型异步电动机起动电流大,起动转矩不大的缺点,这种起动方法适用于大、中容量异步电动机重载起动。绕线转子异步电动机的起动分为转子串电阻和转子串频敏变阻器两种起动方法。

图1 异步电动机Y-△降压起动原理接线图
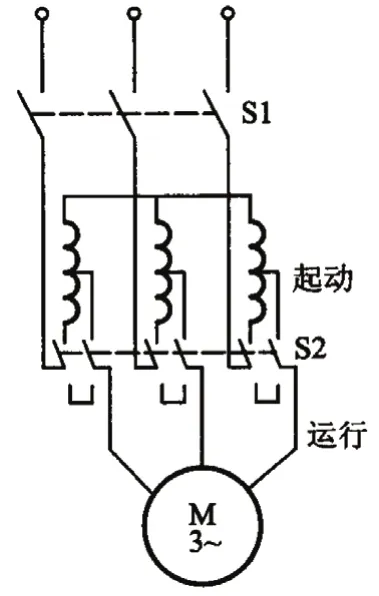
图2 异步电动机的自耦变压器降压起动原理接线图
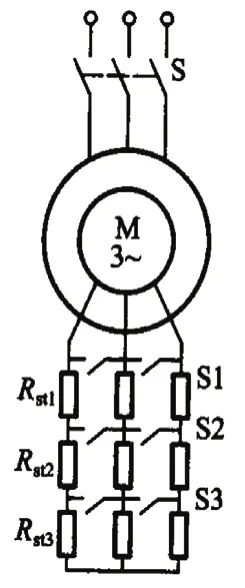
图3 三相绕线转子异步电动机转子串电阻接线图
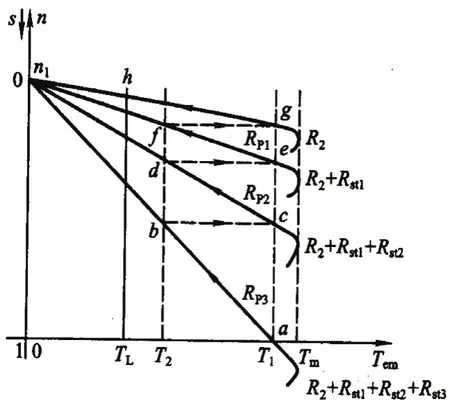
图4 三相绕线转子异步电动机转子串电阻分级起动机械特性图
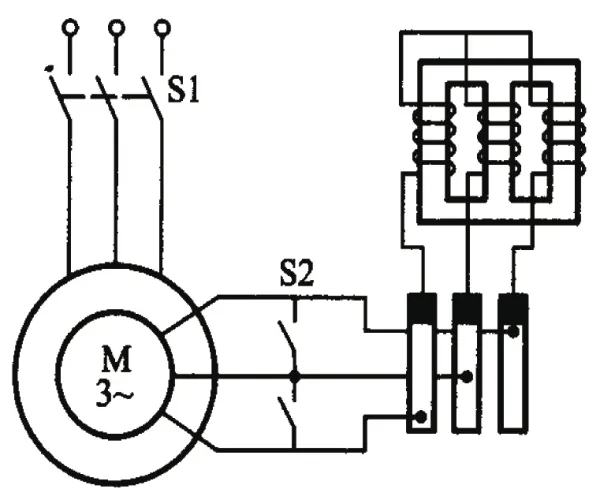
图5 三相绕线异步电动机转子串频敏变阻器起动原理接线图
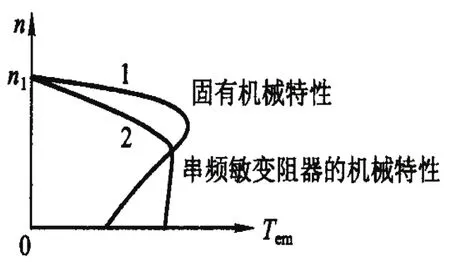
图6 三相绕线异步电动机转子串频敏变阻器起动机械特性曲线
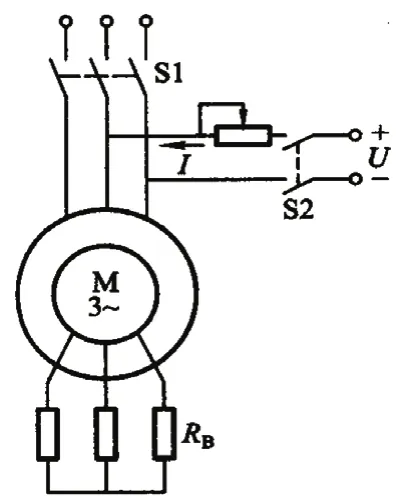
图7 三相异步电动机的能耗制动原理接线图
2.1 转子串电阻起动
为了在整个起动过程中得到较大的加速转矩,并使起动过程比较平滑,应在转子回路中串入多级对称电阻。起动时,随着转速的升高,逐段切除起动电阻,这与直流电动机电枢串电阻起动类似,称为电阻分级起动。图3为三相绕线转子异步电动机转子串接对称电阻分级起动的接线图,图4为对应三级起动时的机械特性图。
起动中,电动机由a点开始起动,经机械特性曲线的b→c→d→e→f→g→h,完成起动过程。
2.2 转子串接频敏变阻器起动
绕线转子异步电动机采用转子串接电阻起动时,若想在起动过程中保持有较大的起动转矩且起动平稳,则必须采用较多的起动级数,这必然导致起动设备复杂化。为了克服这个问题,可以采用频敏变阻器起动。频敏变阻器是一铁损很大的三相电抗器,从结构上看,它好像一个没有二次绕组的三相心式变压器,它的铁心是用较厚的钢板叠成。三个绕组分别绕在三个铁心柱上并作星形联结,然后接到转子滑环上。三相绕线异步电动机转子串频敏变阻器起动电路原理图如图5所示。
起动时,S2断开,转子串入频敏变阻器,S1闭合,电机通电开始起动。
在起动过程中,它自动、无级地减小电阻,如果参数选择适当,可以在起动过程中保持转矩近似不变,使起动过程平稳、快速。这时电动机的机械特性如图6所示,图中曲线1是电动机的固有机械特性。
频敏变阻器的结构简单,运行可靠,使用维护方便,因此使用广泛。
3.三相异步电动机的制动
3.1 能耗制动
异步电动机的能耗制动接线图如图7所示。制动时,接触器触点S1断开,电动机脱离电网,同时触点S2闭合,在定子绕组中通入直流励磁电流,于是定子绕组便产生一个恒定的磁场。转子因惯性而继续旋转并切割该恒定磁场,转子导体中便产生感应电动势及感应电流。转子感应电流与恒定磁场作用产生的电磁转矩为制动转矩,因此转速迅速下降,当转速下降为零时,转子感应电动势和感应电流均为零,制动过程结束。
制动期间,转子的动能转变为电能消耗在转子回路电阻上,故称为能耗制动。
能耗制动广泛应用于要求平稳准确停车的场合,也可应用于起重机一类带位能性负载的机械上,用来限制重物下降的速度,使重物保持匀速下降。
3.2 反接制动
当异步电动机转子的旋转方向与定子磁场的旋转方向相反时,电动机便处于反接制动状态。它有两种情况,一是在电动状态下突然将电源两相反接,使定子旋转磁场的方向由原来的顺转子转向改为逆转子转向,这种情况下的制动称为定子两相反接的反接制动;二是保持定子磁场的转向不变,而转子在位能性负载作用下进入倒拉反转,这种情况下的制动称为倒拉反转的反接制动。
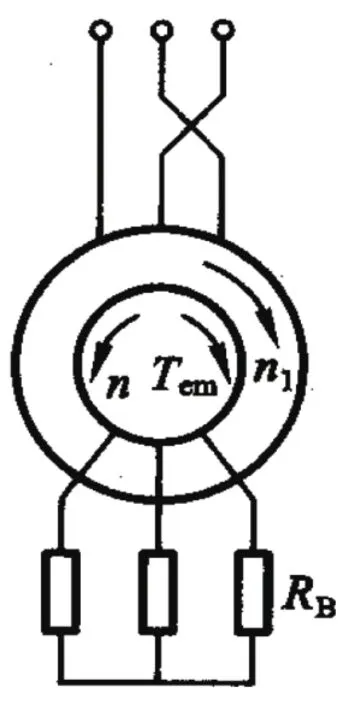
图8 异步电动机定子两相反接的反接制动原理图
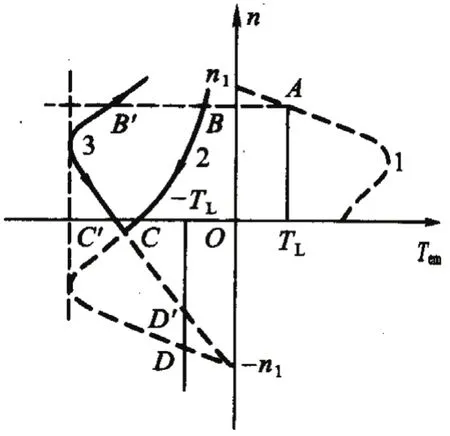
图9 异步电动机定子两相反接的反接制动机械特性曲线图
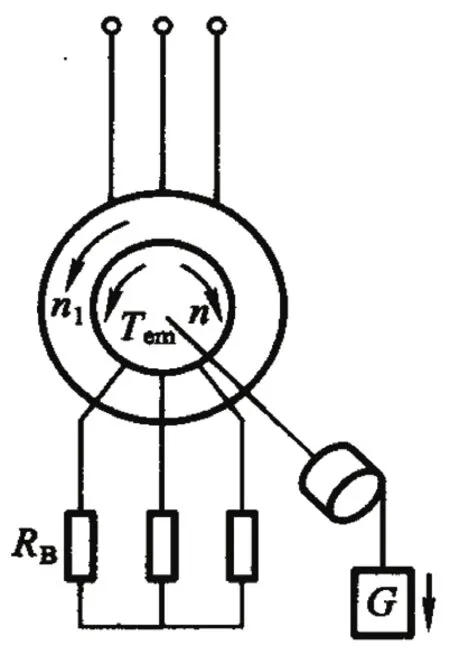
图10 绕线转子异步电动机倒拉反转的反接制动原理图
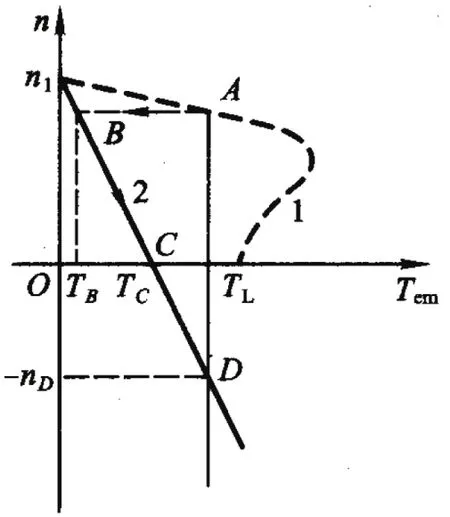
图11 倒拉反转的反接制动的机械特性曲线图

图12 异步电动机回馈制动时的机械特性
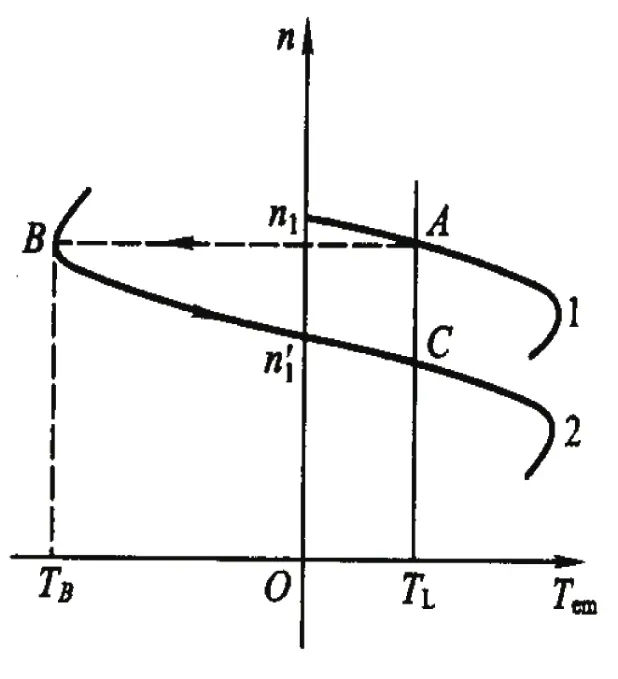
图13 异步电动机在变极或变频调速过程中的回馈制动机械特性曲线图
(1)电源两相反接的反接制动
异步电动机定子两相反接的反接制动原理图如图8所示。
实现:将电动机电源两相反接可实现反接制动。
异步电动机定子两相反接的反接制动机械特性曲线图如图9所示。
机械特性由曲线1变为曲线2,工作点由A→B→C,n=O,制动过程结束。
绕线式电动机在定子两反接同时,可在转子回路串联制动电阻来限制制动电流和增大制动转矩,曲线3。
(2)倒拉反转的反接制动
倒拉反转的反接制动电路原理图如图1O所示。
条件:适用于绕线式异步电动机带位能性负载情况。
实现:在转子回路串联适当大电阻RB。
电机工作点由A→B→C,n=O,制动过程开始,电机反转子,直到D点。在第四象限才是制动状态。由于电机反向旋转,n<O,所以s>1。
轴上输入的机械功率转变成电功率后,连同定子传递给转子的电磁功率一起消耗在转子回路电阻上,所反接制动的能量损耗较大。
3.3 回馈制动
若异步电动机在电动状态运行时,由于某种原因,使电动机的转速超过了同步转速(转向不变),这时电动机便处于回馈制动状态。
要使电动机转子的转速超过同步转速(n>n1),那么转子必须在外力矩的作用下,即转轴上必须输入机械能。因此回馈制动状态实际上就是将轴上的机械能转变成电能并回馈到电网的异步电机的发电运行状态。
生产实践中,异步电动机的回馈制动有以下两种情况:一种是出现位能性负载下放;另一种是出现电动机变极调速或变频调速过程。
(1)下放重物时的回馈制动
电动机机械特性曲线1,运行于A点。
首先将定子两相反接,定子旋转磁场的同步速为-n1,特性曲线变为2。工作点由A到B。经过反接制动过程(由B到C)、反向加速过程(C到-n1变化),最后在位能负载作用下反向加速并超过同步速,直到C点保持稳定运行。
(2)变极或变频调速过程中的回馈制动
制动前,电动机运行于固有机械特性曲线1,运行于A点。
制动后,当电机采用变极(增加极数)或变频(降低频率)进行调速时,机械特性变为2。电机工作点由A变到B,电磁转矩为负,电机处于回馈制动状态。异步电动机在变极或变频调速过程中的回馈制动机械特性曲线图如图13所示。
结论
本文所设计电动机起动和制动电路广泛应用于工程实践中,具有结构简单,运行可靠,使用方法易学易用,维护维修方便。其中的起动电路,能使电动机平稳起动,且对电动机内部结构冲击小;制动电路,制动速度快,成本低,能量损耗小。
[1]许晓峰.电机及拖动[M].北京:高等教育出版社,2004,2.
[2]叶云汉.电机与电力拖动项目教程[M].北京:科学出版社,2008.
猜你喜欢
设备管理与维修(2022年21期)2022-12-28
防爆电机(2020年6期)2020-12-14
哈尔滨铁道科技(2020年4期)2020-07-22
制造技术与机床(2019年11期)2019-12-04
电子制作(2017年1期)2017-05-17
电子制作(2017年20期)2017-04-26
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
电测与仪表(2015年12期)2015-04-09