一种光纤传导的大功率IGBT驱动电路的设计
2011-05-11 11:17:56段科威张树全
通信电源技术 2011年3期
戴 珂,段科威,张树全,刘 聪
(华中科技大学应用电子系,湖北武汉430074)
0 引言
IGBT(Insulated Gate Bipolar Transistor)是由 BJT(双极型三极管)和MOSFET(绝缘栅型场效应管)组成的复合全控型电压驱动式功率半导体器件,兼有MOSFET的高输入阻抗和GTR的低导通压降两方面的优点。IGBT具有驱动功率小而饱和压降低等优点,在电机控制、开关电源、变流装置及许多要求快速、低损耗的领域中有着广泛的应用[1]。本文对应用于有源电力滤波器(APF)的IGBT的特性和使用M57962AL驱动器的设计进行讨论,并提出一种利用光纤传导驱动信号和具有完善保护功能的驱动电路。
有源电力滤波器采用三相全桥结构,需要使用6个IGBT作为开关,因此用6个M57962AL组成驱动电路。在实验中,根据补偿电流与指令电流的关系,用数字信号处理器(DSP)控制PWM引脚的高低电平,并由驱动电路控制IGBT的通断。驱动电路同时对过流故障进行监测,由集成驱动电路对故障信号进行处理,然后经信号调整电路传送给DSP和保护电路,其中一路经由DSP实行封锁控制信号、停机等软件保护,另一路经由硬件保护电路实现故障信号的锁存和封锁PWM信号等保护。
1 驱动器的选择
一个理想的IGBT驱动电路应具有以下基本性能[2]:
(1)动态驱动能力强,能为IGBT栅极提供具有陡峭前后沿的驱动脉冲;
(2)IGBT导通后,栅极驱动电路提供给IGBT驱动电压和电流要有足够的幅度,使IGBT的功率输出极总处于饱和状态,瞬时过载时,栅极电路提供的驱动功率要足以保证IGBT不退出饱和区而损坏;
(3)能向IGBT提供适当的正向电压,一般取+15 V;
(4)能向栅极提供足够的反向电压,利于IGBT的快速可靠关断,大小一般为-10 V左右;
(5)由于IGBT多用于高压场合,因此驱动电路要有良好的输入输出电隔离能力且不影响驱动信号的传输;
(6)具有栅极限幅电路,保证栅极不被击穿;
(7)输入输出信号传输的延时尽可能短;
(8)当发生过流、短路等情况时能迅速发出故障信号传给控制电路做出处理。
目前,市场上常见的驱动器有日本富士的EXB系列、日本英达HR、日本三菱M579系列以及美国的Unitrode公司的UC系列,它们的功能大致相同,但是也有许多不同之处。目前国内流行的EXB841系列不具备定时逻辑栅压功能,过流时若驱动入口信号消失,则其出口信号随之消失而损坏 IGBT,且关断负压-5 V不够可靠。HR065的短路保护稳定,但是可靠性能差。
结合大功率有源电力滤波器(APF)装置的需求,选择日本三菱公司的M57962AL驱动器来设计电路。
2 IGBT驱动的设计与实现
2.1 驱动电路流程图和设计要求
图1为设计的驱动电路的逻辑图。DSP发出的PWM信号经过转接板后,再通过光纤传导到驱动电路上,然后去驱动APF上的IGBT。如果发生短路和过流信号,则通过驱动电路传导出来经过驱动转接板传给DSP,由DSP做出相应的保护动作。

图1 驱动电路流程图
2.2 驱动电路的实现
图2为驱动转接板电路图。驱动转接板的功能就是将从APF控制板中的PWM信号进行转换,然后通过光纤传导到驱动板,同时把驱动板中的故障信号通过回传到APF中的控制器。
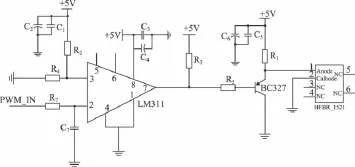
图2 驱动转接板电路图
如图3所示为驱动电路板的电路图。通过光纤传导过来的信号输入到M57962AL的14管脚,故障信号通过PC817传输出去。
(1)驱动电路的 UCC、UEE选择
由于IGBT导通后的管压降与所加正向栅压有关,在漏电流一定的情况下,正向栅压增加时,通态压降下降,器件导通损耗减少。但若发生短路和过流,正向栅压越高,则电流幅值越大,IGBT越容易损坏,对集电极额定电流200 A的IGBT来说,UCC选择+12 V~+15 V比较合适,在这一点,通态接近饱和值,是IGBT最佳工作点。而为了使IGBT在关断期间可靠截止,给截止状态的IGBT外加-10 V的反向栅压UEE比较合适。
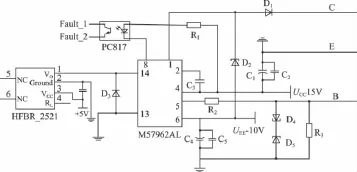
图3 驱动电路板电路图
(2)驱动电源的电源设计
驱动电路的输出端通常接高压大电流电路,为了实现驱动电路中低压电路和高压电路两边的电路隔离,采用了专门的电源模块对M57962AL的开通电压UCC和关断电压UEE供电,实现强弱电的隔离。
(3)栅极电阻R2的选择
栅极驱动电阻的取值非常重要,适当数值的栅极电阻能有效地抑制振荡、减缓开关开通时间、改善电流上冲波形、减小电压浪涌。从安全可靠性角度来说,应当取较大的栅极电阻,但是,较大的栅极电阻影响开关速度、增加开关损耗。从提高工作频率角度,应当取较小的栅极电阻。一般情况下,可靠性是第一位的,因此使用中倾向于取较大值的电阻。通过实验确定栅极电阻的最佳值。由实验所测比较合适的值是10 Ω。
(4)电容C3的选择
M57962AL对保护检测时间的调整可以通过其2管脚和4管脚之间的电容大小来调整,应用很灵活,可以根据实际情况设置。若2管脚悬空,短路保护检测时间为2.6 μs,保护动作太灵敏,容易引起误动作。为此,通过在2、4管脚之间接上一个电容C3来调节保护时间,选取1 000 pF电容时的保护时间大约为3 μs,若保护仍然过于敏感,则可选取3 000 pF的电容,此时的保护时间约为 5.6 μs。
(5)故障信号的传输
本实验采用快速光耦PC817传输短路和过电流故障信号,如果有更高的要求可以采用光纤对故障信号进行传导。
2.3 光纤信号传输的设计
光纤光缆是由玻璃或塑料制成,所以光纤连接发射器和接收器之间无直接的电气连接,这有助于减轻环路噪声问题,并能隔离电压,以防止相互干扰,不产生附加辐射,对EMI不敏感。所以在驱动和控制电路之间用光纤能精确地传导PWM信号,不仅解决了功率电路和控制电路之间的强弱电的隔离,抗电磁干扰问题,而且还能实现驱动信号的远距离传输。光纤的另外一个特点是可以实现信号高速传送,减少传输时延,光信号传输的一般原理如图4所示。

图4 光纤传送原理图
在传输方面,当采用单脉冲和两个周期数据传送测试,输入信号频率f=2.5 MHz时的数据延时为160 ns;f为 2 MHz 时的数据传输约为 180 ns[3],在所用装置中APF的输出PWM频率为9.6 kHz时,延时完全满足所设计IGBT驱动的要求。
光发射器和接受器分别采用Agilent公司的HFBR-1521光发射器和HFBR-2521光接收器,这个组合可实现DC~10 MHz数据的高质量传送,而且在电流合适的情况下,可传送几十米远。
光纤传输信号的最远距离和传输速率有很大的关系,40 kbit/s时,可传输120 m,5 Mbit/s时,可传输20 m。
3 实验波形
经过实际的波形测量,在图5、6中通道1为光纤发射头前的波形曲线,通道2为光纤接收头后的波形曲线。由这两个图的波形分析得知光纤传输系统的延时为大约120 ns,并且在图6给出了在光纤发射头前和接收头后的波形,可以看出这组波形是反向的。
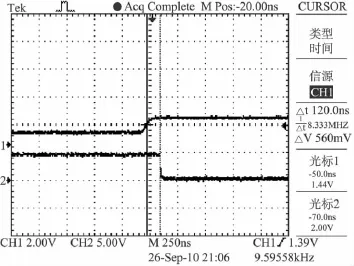
图5 光纤的延时测量波形
在图7中通道1所示为从APF中输出给驱动的波形,通道2为驱动电路输出的波形。由图7波形分析得知,APF控制板输出到最后输出给IGBT的波形延时500 ns,在设计要求延时范围内。
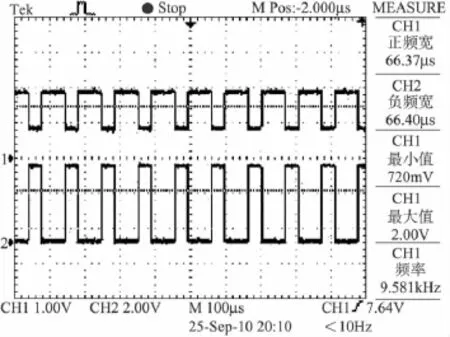
图6 光纤发射头前波形和光纤接收头后波形
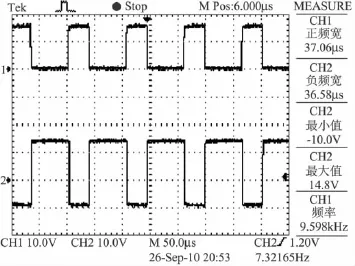
图7 驱动输入和输出波形
4 实验结论
性能优越的驱动电路,是有源滤波器(APF)等含有大功率开关管装置正常工作的保证。通过实验可以看到,光纤传输PWM信号不仅失真小、延时小,而且从根本上消除了主电路对驱动电路的干扰,还能保证长距离传输。所设计的基于光纤传导的驱动电路性能可靠、符合要求,具有一定的实用意义。
[1]陈 坚.电力电子学第二版[M].北京:高等教育出版社,2004.
[2]林渭勋.现代电力电子电路[M].杭州:浙江大学出版社,2002.
[3]Wang L M,Lorenz R D.Rotor Position Estimation for Permanent Magnet Synchronous Motor using Saliency tracking Self-sensing Method[C].Proceed of IEEE IAS 2000 Annual Meeting.Rome,Italy:IEEE 2000:445-450.
猜你喜欢
真空与低温(2022年2期)2022-03-30 07:11:22
自动化仪表(2020年10期)2020-11-13 03:31:00
小学科学(学生版)(2019年10期)2019-11-16 08:55:04
制造技术与机床(2017年10期)2017-11-28 05:20:52
中国环境监察(2017年5期)2017-10-23 05:26:48
电测与仪表(2016年14期)2016-04-11 12:34:22
船舶力学(2015年6期)2015-12-12 08:52:20
电源技术(2015年7期)2015-08-22 08:48:52
微特电机(2015年1期)2015-07-09 03:45:10
汽车维护与修理(2014年10期)2014-02-28 12:15:01