基于视频的高速公路违章停车实时检测算法
2011-05-08 02:09张贝贝武奇生
电子科技 2011年9期
张贝贝,武奇生
(长安大学电子与控制工程学院,陕西西安 710064)
随着我国高速公路的快速发展和机动车拥有量的不断增加,因高速公路违章停车所导致的交通事故也呈上升趋势。由于高速公路行车速度快等特点,发生违章停车后,如不及时处理,极易导致车辆碰撞事故或引发交通拥堵,严重影响高速公路的正常运营。因此,实时遏制高速公路上随意停车显得尤为重要。采用交通事件自动检测系统对违章停车进行快速准确地检测,及时发现违章车辆,并采取措施及时疏导交通,排除事故,能够减少、避免交通拥堵,有效地预防二次交通事故的发生[1-3]。在交通事件自动检测算法中,基于视频的检测算法是最直接有效的。
近年来,国内外专家致力于研究各种交通事件检测算法。如光流法、形态学边缘检测法。其中光流法的优点是当运动物体重叠时,利用其光流场的分布,可以进行检测。但大多数光流计算方法相当复杂,实时性差,如果没有特别的硬件装置则不能被应用于全帧视频流的实时处理。形态学边缘检测算法有着过于明显的缺陷,例如算法时间长,复杂度高[4-5]。背景差分算法既能检测运动车辆又能检测静止车辆,对于实时判断是否出现违章停车是一种十分有效的车辆检测算法,大大提高了算法的准确性。
为满足算法的实时性要求,提出一种基于视频的区间背景差分和OTSU阈值分割算法,该方法集合数据采集技术和算法检测技术的优势,既能保证全面性,又能保证检测的准确性和实时性。实验数据验证表明,该方法检测总数、识别率、漏检率、检测所需时间都比较理想。
1 常见交通检测器性能比较
视频检测器,主要通过摄像机等视频采集设备获取交通流的实时视频信息,然后通过视频和图像处理的方法完成交通流检测或者对目标进行跟踪和识别。
以下是几种常见的交通检测器的性能优缺点比较:
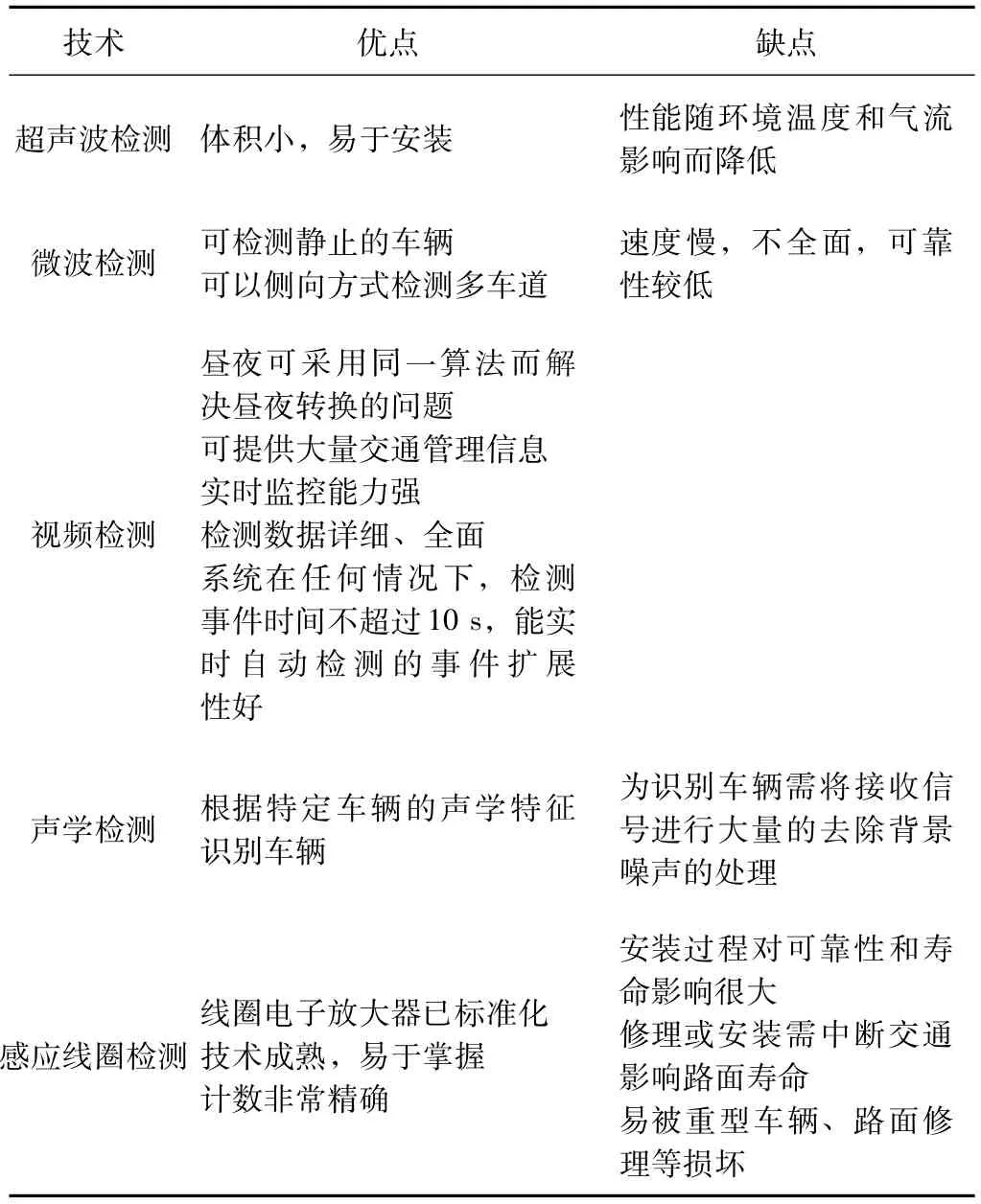
表1 交通检测器性能比较
采用多目标识别与跟踪技术的视频检测车辆有其独特的优越性,主要体现在以下几个方面:(1)施工和日常维护无需切割路面,不干扰正常交通,同时也无需因道路改建、维修而中断交通检测。(2)全画面检测:只要在摄像机的图像画面范围内,发生的交通事件和事故,系统都能检测到。(3)全天候检测功能:在昼、夜、雨、雪、雾及各种气候条件下,即使在道路没有照明的情况下,只要车辆有正常的前灯、尾灯照明,均可有效检测事件、事故。(4)系统自动记录事件、事故发生之前和之后的图像,前后≥3 min[6-8],所记录的视频序列标记与报警信息相关。
由于视频检测具有以上的特性,且通过表1的比较可得到,视频检测技术与超声波检测技术、微波检测技术、声学等检测技术、感应线圈检测技术相比在高速公路实时监控方面具有较大优势,作为新的检测技术将越来越多地应用于高速公路交通事件检测系统、高速公路监控系统、高速公路管理系统等领域。
2 基于视频的违章停车自动检测系统组成
基于视频的违章车辆检测技术是近年来在视频图像处理交通检测技术基础上逐步发展起来的一种新型车辆检测技术,它具有无线、可一次检测多参数和检测范围较大的特点。与其它传统方法相比,基于视频的违章停车检测技术结构简单、灵活性好、同时提供多张违章照片,更具有说服力,减少了处罚过程中所产生的争执。结构如图1所示,采用工业摄像机和工业控制计算机构成系统。

图1 基于视频的违章停车自动检测系统
整个过程不用感应线圈检测车辆,而是通过道路上所安装的CCD摄像机对监控区域进行实时监控,对得到的视频图像进行分析处理来判断是否有车辆违章停车。它将工业摄像机拍到的图像数字化后直接存入控制计算机硬盘,硬盘数据通过光端机光纤收发器ModemGPRS等通讯方式传回数据管理中心,无需人工取盘。此外利用动态调整低照度摄像机,夜间仅利用路灯、车尾灯就可以进行实时抓拍。
3 基于视频技术的违章停车检测算法
3.1 检测原理
目标检测实质是通过对摄像机拍摄到的图像序列进行分析,检测场景中的运动目标并进行目标提取与检测,进一步对目标的运动参数进行估计。从而判别是否有事件发生,如果无事件发生,则继续进行实时检测;若有事件发生,则将事件视频图像及报警区域图像切换到主监控画面,同时实施报警、调度警力和实施救援等。检测流程图2所示。
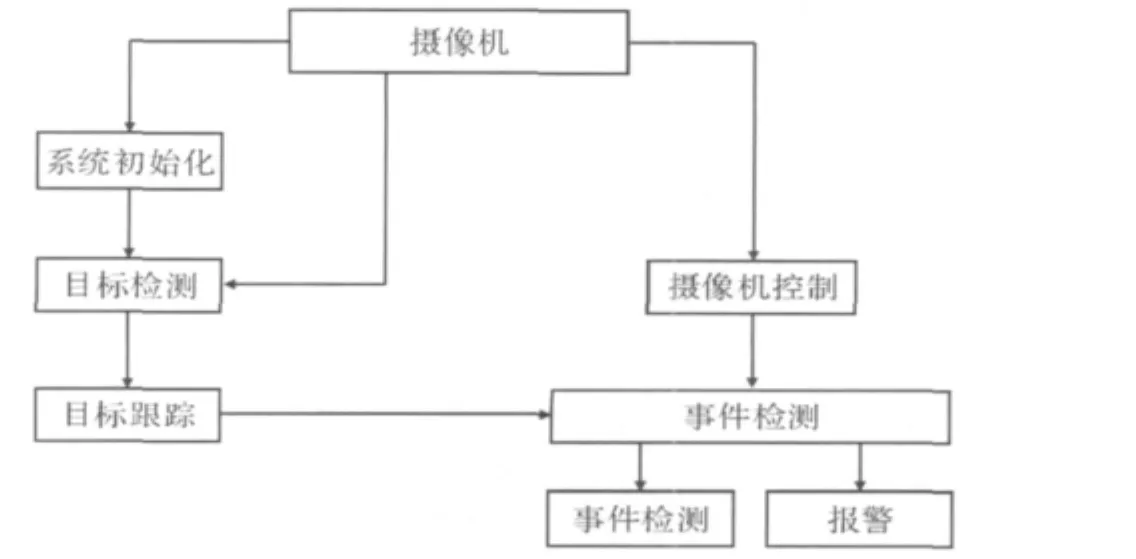
图2 检测流程
3.2 基于视频技术的高速公路违章停车检测算法
3.2.1 背景差分算法及OSTU阈值分割法
背景差分这种方法基本工作原理是系统首先保存一张背景图像,然后与实时输入的图像帧进行相应点的像素值比较,以d(i,j)和阀值Th表示图像当前输入帧的检测区域是否与背景帧图像中的限定区域图像信息一致,可用式(1)描述

其中,f1(i,j)参照图像或背景图像帧坐标为f2(i,j)处的像素值,为输入图像帧坐标为(i,j)处的像素值。如果输入图像中对应区域不含车辆,则和参照图像相同,此时差值为0;相反如果输入图像限定区域中包含车辆,则和参照图像不同,此时差值为一个>0的数。当该值>阀值Th时,认为可能是有物体在运动,若>Th的像素数目多于某个值时,可判断有车辆进入。为了减少计算量,图像背景差仅在图像特定区域上进行。
由OTSU阈值分割法,对一幅图像,记t为前景与背景的分割阈值,前景点数占图像比例为w0,平均灰度为u0;背景点数占图像比例为w1,平均灰度为u1。图像的总平均灰度为

从最小灰度值到最大灰度值遍历t,使得值

最大时t即为分割的最佳阈值。式类间方差值,阈值t分割出的前景和背景两部分构成了整幅图像,而前景取值 u0,概率为 w0,背景取值 u1,概率为w1,总均值为u,根据方差的定义即得该式。
3.2.2 违章停车的检测
在文中为达到实时性的要求,采用基于区间的检测方法判断是否有车辆违章。
第一步:利用所采集的视频,提取出背景图像,如图2(a)所示。
第二步:将当前图像灰度化后与背景图像进行背景差分,并对背景差分后的图像进行OTSU阈值分割,通过背景差分判断区间内是否有车辆通过,如图2(b)所示。若无车辆通过则结束检测,若有车辆通过则进行下一步。
第三步:在连通区域进行标记,并计算每个区域的特性,找出面积较大的轮廓区域,如图2(c),图2(d)所示,在不同位置有车辆通过,则用红色矩形框进行标识。
第四步:如连续500帧内车辆未发生明显的移动,则判断该车辆处于静止状态,如图2(e)和图2(f)所示,说明有违章车辆经过,给出车辆违章停车信号,启动数码相机进行抓拍,或启动报警系统,同时将当前全景视频图像进行保存。否则,车辆处于运动状态,停止检测则报警。
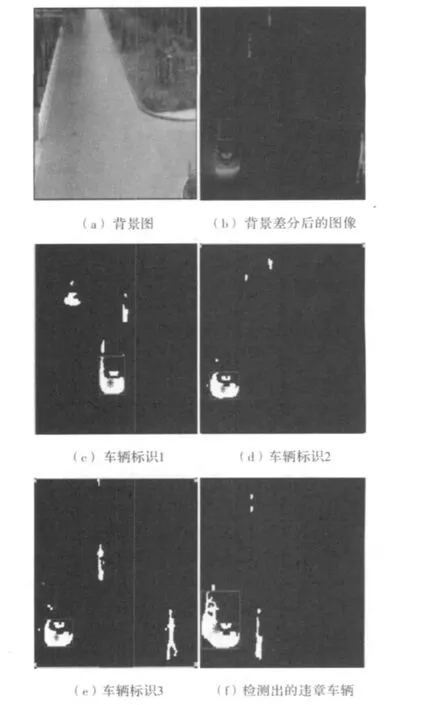
图2 实验结果
3.2.3 实验结果分析及对比
对交通违章检测算法进行优劣评价时,需要设定一定的评价指标。通常衡量关于违章停车检测算法有3个指标[9-10]:识别率、漏检率和检测所需时间、检测的总车数。如式(4)和式(5)所示

其中,实际违章总数是在所采集的视频中,由人工计算所得到的车辆违章总数;算法检测违章总数是在所采集的视频中,由算法检测所得的车辆违章总数。
由于以上几个评价交通事件检测算法的指标存在着相互依赖的关系,所以一个算法必须权衡这几个方面,没有一个必然的最佳选择,一般在评价交通事件检测算法时,将漏检率限制在一个可接受的范围内,尽量改善识别率和检测时间。经过实验分析,得出关于违章停车的背景差分与OTSU阈值分割法与其他算法的性能比较如表2所示。

表2 算法性能比较
由表2可见,同组数据用3种不同的检测算法,背景差分与OTSU阈值分割算法检测总数最高,漏检率也是3种算法中较小为5.50,其检测所需时间虽高于形态学边缘检测法为26 ms,但检测总数、识别率与漏检率、所需时间这4个指标并非彼此孤立,如果增加算法的检测时间,那么该算法能够分析更多的数据,从而提高检测总数并降低漏检率,但增加检测时间将会降低事件检测算法的实时性,延误对交通事件的处理;如果降低检测所需时间将会使得检测率降低和误报率上升。权衡4个指标,得出背景差分与OTSU阈值分割算法是这4种算法中的最佳算法,用其检测交通事件效果良好。
4 结束语
提出一种基于视频技术的高速公路违章停车检测算法,视频技术由于具有检测全面、使用方便、实时性强,因此将会成为未来交通事件检测的主要趋势。在确定的检测区间内利用背景差分与OTSU阈值分割算法来检测是否有违章停车,背景差分法对检测静止车辆检测率高、漏检率和检测时间也比较理想。
[1]PANKAJ K,SURENDRA R,HUANG Weimin,et al.Framework for real-time behavior interpretation from traffic video[J].IEEE Transactions on Intelligent Transportation Systems,2005,6(1):43-53.
[2]JIN Xin,SRINIVASAN D,CHEU R L.Classification of freeway traffic patterns for detection using constructive probabilistic neural networks[J].IEEE Transactions on Neural Networks,2001,12(5):1173-1187.
[3]沈志熙,杨欣,黄席樾.均值漂移算法中的目标模型更新方法研究[J].自动化学报,2009,35(5):478-483.
[4]代科学,李国辉,涂丹,等.监控视频运动目标检测减背景技术的研究现状和展望[J].中国图象图形学报,2006,11(7):919-927.
[5]肖丽君,于哲舟,周栩,等.基于对称差分算法的视频运动目标分割[J].吉林大学学报,2008,46(4):691-696.
[6]KIM K,CHALIDABHONGSE T H,HARWOOD D,et al.Background modeling and by codebook construction[C].Singapore:Proceedings of IEEE International Conference on Image Processing,2004:3061-3064.
[7]刘惟锦,章毓晋.基于Kalman滤波和边缘直方图的实时目标跟踪[J].清华大学学报,2008,48(7):1104-1107.
[8]姜紫峰,刘小坤.基于神经网络的交通事件检测算法[J].西安公路交通大学学报,2000,20(3):67-73.
[9]汤淑明,王坤峰,李元涛.基于视频的交通事件自动检测技术综述[J].公路交通科技,2006,23(8):116-121.
[10]HARITAOGLU I,HARWOOD D,DAVIS L.W4:Real2time surveillance of people and their activities[J].IEEE Transactions on Pattern Analysis and Machine Intelligence,2000,22(8):809-830.
猜你喜欢
数学杂志(2022年5期)2022-12-02
江苏安全生产(2022年4期)2022-05-23
汽车工程师(2021年12期)2022-01-17
新世纪智能(数学备考)(2021年5期)2021-07-28
当代陕西(2020年14期)2021-01-08
贵州师范学院学报(2016年4期)2016-12-01
河南电力(2016年4期)2016-11-30
大社会(2016年3期)2016-05-04
河南电力(2016年5期)2016-03-10
信息安全研究(2015年3期)2015-02-28