一种电动汽车用制动能量回收控制器的设计
2011-04-27 09:53全力顾剑波朱孝勇陈燎张德望
电气传动 2011年5期
全力,顾剑波,朱孝勇,陈燎,张德望
(1.江苏大学 电气学院,江苏 镇江 212013;2.江苏大学 汽车与交通工程学院,江苏 镇江 212013)
一种电动汽车用制动能量回收控制器的设计
全力1,顾剑波1,朱孝勇1,陈燎2,张德望1
(1.江苏大学 电气学院,江苏 镇江 212013;2.江苏大学 汽车与交通工程学院,江苏 镇江 212013)
提出了利用超级电容作为制动能量回收储能容器的复合电源方案,并针对ATMEL公司mega16单片机,应用数字PID控制算法,设计了一种可应用于纯电动汽车的制动能量回收控制器模块。介绍了再生制动的原理及其控制器主电路与信号采集电路,以及用C语言编写的各工作模块。试验调试结果表明,充、放电电流随电压变化时,数字PID控制策略能很好地调节PWM占空比的合理变化,并验证了此制动能量回收系统可以有效地回收电动汽车再生制动能量。
超级电容;电动汽车;制动能量回收控制器
1 引言
内燃机汽车经过120年的发展和壮大,其性能已日趋完善,在安全、环保、节能和廉价等方面取得了重大的进展。但是,内燃机汽车的发展面临着环境污染和石油危机的双重挑战[1],而电动汽车作为陆上交通工具和运载工具的成员之一,已逐渐成为人们生活中一种重要的绿色交通工具。蓄电池是电动汽车的能量源泉,但由于电池的能量密度较低,使电动汽车的续驶里程受到限制。而再生制动能将汽车的动能转化成电能,进行回收,有效提高了电动汽车电池能量的利用率,明显提高续驶里程,受到电动汽车研究领域学者的关注和重视。但采用向蓄电池充电来吸收再生制动回馈的能量,难以实现短时间大功率高效率充电,且蓄电池的充放电循环次数有限、成本高。
对此,本文设计了一种可用于电动汽车的制动能量回收控制器,并以超级电容为储能容器来作为电动汽车的辅助电源系统[2],以改善电动汽车一次充电续驶里程。实验表明,当电动汽车处于再生制动运行工况下,可有效回收制动能量的19.7%,延长了电动汽车的续驶里程。
2 能量回收控制系统基本原理
电动汽车用再生制动系统结构如图1所示,采用速度控制策略。在车辆正常行驶工况下,蓄电池经过再生控制器再到电机控制器驱动电机;在车辆处于再生制动工况下,再生制动控制器接收电机控制器中的制动信号,通过控制算法控制再生控制器中的双向DC/DC变换器,将电动汽车再生制动产生的能量以最大的效率存储于超级电容;在车辆启动或者爬坡时,再生控制器接收电机控制器中的加速信号,控制双向DC/DC变换器,将超级电容中的能量升压预先驱动电机,并在系统判断电机达到预定速度值后切换至蓄电池供电[3-4]。

图1 系统结构图Fig.1 System structure diagram
不同工况下系统工作方式:
1)正常行驶工况。此时断开超级电容回路,由蓄电池独立给电机供电,见图2a。
2)启动/加速/爬坡行驶工况。此时由超级电容预先驱动电机至速度预定值后切换至蓄电池供电,见图2b。
3)再生制动行驶工况。由于锂电池不能实现短时间的大功率高效率充电以及锂电池充电循环次数有限,因此能量回馈时断开蓄电池的回路,回馈制动产生的能量全部充给超级电容,见图2c。
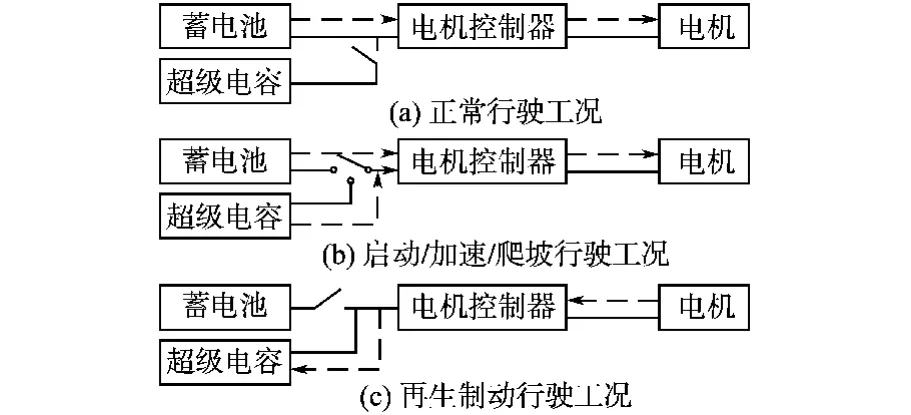
图2 系统工作原理框图Fig.2 Schematic diagram of system
由图2可以看出,这种超级电容与蓄电池组成的复合电源系统有如下优点:1)可在再生制动工况下实现大电流高效率充电,从而提高能量回收效率来延长电动汽车的续驶里程;2)可在电动车启动、加速、爬坡工况下预先驱动电机,避免蓄电池大电流放电,提高蓄电池的使用寿命;3)可提高电动汽车的制动力矩,改善制动系统的可靠性。
3 系统硬件方案设计
本能量回收系统控制回路主要包括控制主电路、驱动电路以及信号采集等电路的设计。该系统以ATMEL公司mega16单片机为控制核心,整个系统硬件部分包括双向DC-DC、超级电容、通信电路、隔离保护电路、控制执行系统等,如图3所示,其中采样信号包括超级电容电压、超级电容升压供电时的输出电压、制动时电机发电电压、蓄电池电流、超级电容的充放电电流、电机转速、制动信号以及加速信号,控制信号为2路PWM输出信号及1路开关信号,其中2路PWM信号通过逻辑变换分为4路控制信号控制双向DC/DC模块。

图3 控制板硬件结构Fig.3 The hardware architecture of control board
3.1 能量回收控制主电路
再生制动控制主电路采用双向升降压DCDC变换器,驱动芯片选用IR公司的IR2112以自举技术实现,并采用电压速度双闭环控制,以最大效率回收制动能量,如图4所示。

图4 能量回收系统主电路拓扑结构Fig.4 The main circuit topologyical structure of regenerative braking system
图4中,VS为蓄电池电压;Q1~Q6,q1~q4为场效应管;SC为超级电容;SI为霍耳电流传感器;S为继电器;L为储能电感;R1~R4为精密电阻;C为普通电容;V1为超级电容输出电压反馈;V2为超级电容电压。
控制策略如下:1)当电动汽车处于刹车减速状态时,继电器S跳至再生控制回路,并使q1完全导通,此时超级电容工作在充电情况。电机发电电压随速度降低而逐渐减弱,而超级电容电压逐渐升高,由于电机发电电压同转速成正比,因此,同时监测超级电容电压与电机转速,在电机发电电压与超级电容电压持平前,即反馈超级电容电压与电机转速,通过控制算法使q4斩波升压,对电机发电电压进行升压,继续对超级电容充电,并根据速度调节升压PWM波占空比,以最大效率回收制动能量。2)当电动汽车处于启动、加速等状态时,继电器S先跳至再生控制回路,完全导通q2并使q3斩波,此时超级电容工作在升压放电情况,同时监测电机转速与超级电容电压,超级电容升压输出预先驱动电机,当电机转速达到预定值,即使继电器S切换至蓄电池回路,由蓄电池给电机供电。如此既避免了电机启动、爬坡等工况由于大电流放电对蓄电池的伤害,又延长了电动汽车的续驶里程。
3.2 信号采集电路
信号采集系统主要由速度、电流信号采集电路、制动信号采集电路、加速信号采集电路等经过信号调理电路至适合单片机内部A/D转换的信号。主要对电机的速度及加减速状态、超级电容电压、电机正常运行电流以及回馈电流进行采集。其中电流检测由霍耳电流传感器实现,电压检测由分压电路实现,速度信号采集由霍耳信号引出,通过光耦隔离避免对霍耳信号产生影响,并通过mega16定时器输入捕捉功能实现[5],如图5所示。

图5 电机速度信号采集电路Fig.5 The circuit of signal acquisition of motor speed
4 系统软件设计
该制动能量回收系统的软件设计由单片机主程序、各部分功能模块子程序及上位机串行通信程序组成。系统上电后,单片机即开始采集各项数据,经过内部A/D转换后,由串口传输至上位机控制面板。功能模块子程序由串口中断程序、外部中断程序、ad中断程序及能量回馈/释放控制程序组成,采用此模块化的软件设计可以方便编写调试及控制算法的改变。
4.1 能量回馈/释放控制程序模块
此模块的功能是判断电动汽车的行驶状态,来控制超级电容的充放电。当系统判断电动汽车处于制动模式时,超级电容工作在充电方式,继电器跳至再生控制回路并调动升压程序,以保证能量最高效率的回收;当系统判断电动汽车处于启动、加速模式时,超级电容工作在放电方式,继电器同样跳至再生控制回路,调动升压程序来预先驱动电机,当电机转速达到预定值时切换至蓄电池向电机供电,软件控制流程如图6所示。

图6 主循环程序框图Fig.6 Flow charts of main program
4.2 通信模块
通信模块采用485总线,使用串口USB转换芯片PL2303方便上位机的连接,并采用高速光耦6N137信号隔离以避免信号干扰。通信子模块完成的任务,一是接收下位机发送的信息并实时的显示电流、电压、转速等各项数据及曲线,二是可以人为控制电机转速大小及蓄电池主回路的通断,并根据控制对象和检测对象,确定通信协议。通信软件流程图如图7所示。
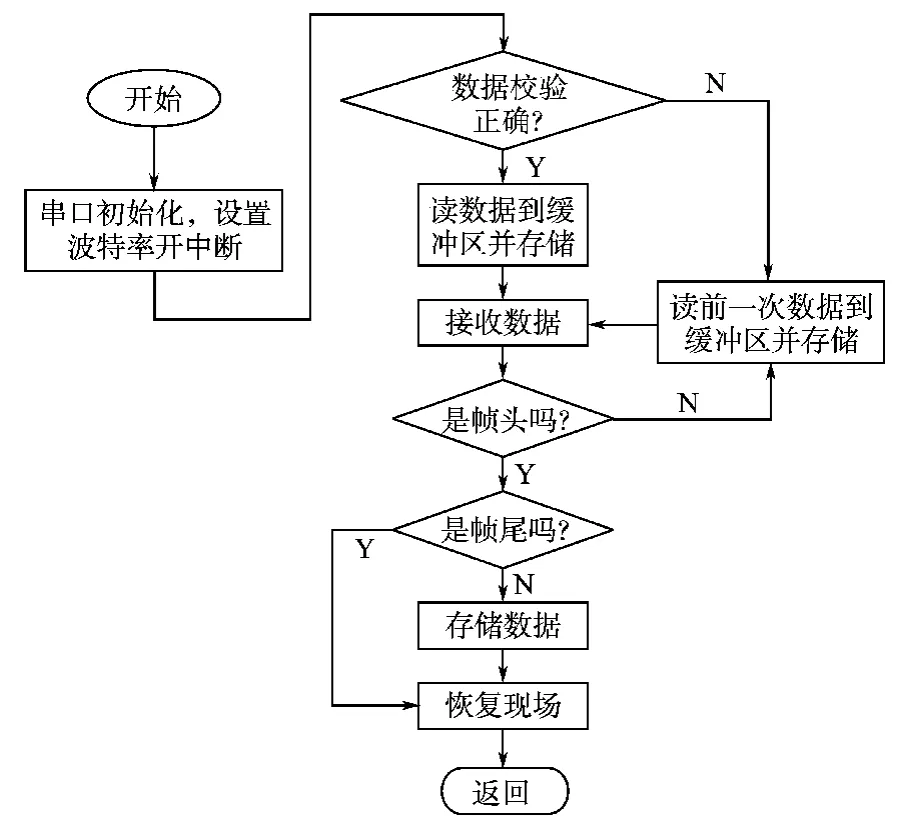
图7 通信流程图Fig.7 Flow charts of communication
5 试验调试结果
由于试验条件有限,目前搭建的试验调试平台主要包括蓄电池组、HCC超级电容组、能量回收控制器、直流无刷电机及控制器、飞轮等,其中蓄电池额定电压为50V、10A·h,超级电容额定电压为60V、额定容量5F(由24个单体额定电压2.7V、额定容量120F串联而成),飞轮转动惯量为J=1.81kg·m2,飞轮与电机速度传动比为2∶1。试验调试以最大能量回收率为主要目标,并以控制电机速度为主,PWM脉宽调制采用数字PID控制。
能量回收试验:首先由蓄电池驱动电机,当飞轮速度逐渐升高并稳定在620r/min时开始滑行电制动,并在速度降至500r/min时开始升压充电,以最优效率回收能量。
由图8a可以看出,增加了再生制动后,由于初始充电电流较大达到27A,即电制动力较大,因此此时电机减速度要比电机正常滑行减速度大得多;而当电机转速下降至200r/min时,充电电流已经很微弱,即电制动力较小,此时与电机正常滑行减速度基本相同。图8b中电机正常运行母线电流为10A,而再生制动时电流与电机正常运转时方向相反,并随电机转速下降而下降。图8c为超级电容充电电压曲线,其中充电初始超级电容电压由14V跳变至25V是由于超级电容存在内阻,初期大电流充电时在超级电容内阻上形成了压降。

图8 能量回收试验曲线Fig.8 The test curves of reclaiming energy
由试验数据得知,此再生制动系统回收效率与损失动能比为19.7%,而与回收阻力矩比可达到35%。
能量释放试验:超级电容初始电压为30V,由控制算法通过双向DC/DC变换器升压至50V并预先驱动电机,当电机转速达到预定值时由继电器切换至蓄电池供电。
图9a为电机复合电源速度曲线,图9a中P点为超级电容与蓄电池驱动的切换点。而图9b为电机正常启动电流,由于本试验台电机飞轮转动惯量较小,因此启动电流并没有实际电动汽车启动时的尖峰电流。图9c为复合电源启动电机时电流曲线,图9c中S点为切换点,同样受限于超级电容的能量释放速度,因此启动电流上升速度不够,即转速上升较慢。
由试验数据可知,当超级电容预先驱动电机启动时,每次可省去蓄电池650J的能量,有效延长了电动汽车的续驶里程。
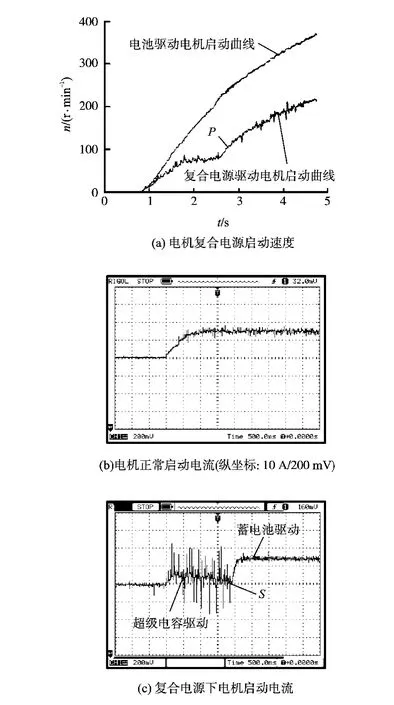
图9 能量释放试验曲线Fig.9 The test curves of releasing energy
6 结论
本文针对超级电容复合电源系统设计了一种电动汽车再生制动控制器,并以mega16为控制核心,整个系统硬件部分包括双向DC-DC、超级电容、通信电路、隔离保护电路、控制执行系统等,软件设计应用C语言实现模块化编程。试验调试结果表明,该再生控制系统的软硬件设计及控制策略能够满足电动汽车再生制动回馈能量的实现,且回收效率较高。该再生制动控制系统的实现对实现高水平的能量回收有着十分重要的意义,且通用性好、灵活性强,可实现多种不同的控制策略。
[1] 胡骅,宋慧.电动汽车[M].北京:人民交通出版社,2003.
[2] 陈庆樟,何仁,商高高.汽车制动能量再生系统复合储能方式研究[J].公路交通科技,2008,25(11):145-148.
[3] Inaba C Y,Konishi Y ,Nakaoka M.High-frequency Flyback-type Soft-switching PWM DC-DC Power Converter with Energy Recovery Transformer and Auxiliary Passive Lossless Snubbers[J].Electric Power Applications,IEE Proceedings,2004,151(1):32-37.
[4] 程伟,徐国卿,王晓东.电动汽车用永磁无刷电机回馈制动技术研究[J].电气传动,2005,35(11):15-23.
[5] 马潮.AVR单片机嵌入式系统原理与应用[M].北京:北京航空航天大学出版社,2007.
修改稿日期:2010-11-15
Design of a New Regenerative Braking Controller for Electric Vehicle
QUAN Li1,GU Jian-bo1,ZHU Xiao-yong1,CHEN Liao2,ZHANG De-wang1
(1.SchoolofElectricalandInformationEngineering,JiangsuUniversity,Zhenjiang212013,Jiangsu,China;2.SchoolofAutomobileandTrafficEngineering,JiangsuUniversity,Zhenjiang212013,Jiangsu,China)
The energy reclaiming scheme of composite power by using the super capacitor as energy storage element to realize the regenerative braking of electric vehicles was put forward.A kind of regenerative braking controller of electric vehicle based on digital PID control technology and mega16microcontroller of ATMEL corporation was designed.The principle of regenerative braking as well as main circuit of controller,signal acquisition,and each work module written with C language were introduced.The test result indicates that the regenerative braking controller based on PID theory has a very good adjustment of PWM of duty cycle when charge and discharge current changing with voltage,and energy recovery system is confirmed to be able to recycle the electric automobile regenerative braking energy well.
super capacitor;electric vehicle;regenerative brakingcontroller
U469
A
国家自然基金(50807022);江苏大学高级人才启动资金(09JDG031)
全力(1963-),男,博士,教授,Email:quanli@ujs.edu.cn
2010-05-26
猜你喜欢
汽车维修与保养(2021年8期)2021-02-16
动漫星空(兴趣百科)(2019年3期)2019-03-07
电子制作(2017年7期)2017-06-05
汽车维修与保养(2017年1期)2017-05-15
海外星云(2016年17期)2016-12-01
汽车维修与保养(2016年1期)2016-09-07
汽车维修与保养(2016年12期)2016-03-14
汽车维修与保养(2016年11期)2016-02-21
电源技术(2015年1期)2015-08-22
电源技术(2015年7期)2015-08-22