一种高精度GPS基线网抗差估计方法
2011-04-27 07:26高井祥郑南山
全球定位系统 2011年3期
王 彬,高井祥,王 坚,郑南山
(1.中国矿业大学环境与测绘学院,江苏徐州221116;2.国土环境与灾害监测国家测绘局重点实验室,江苏徐州221116;3.江苏省资源环境信息工程重点实验室,江苏徐州221116)
0 引 言
随着现代科研和工程项目对GPS定位精度要求的不断提高,许多情况下要建立高精度的GPS控制网,数据处理时,一般采用Gamit、Bernese等精密基线解算软件进行解算,然后将带有协方差阵的基线作为观测值进行整网的平差。GPS观测量受卫星数据质量和周围环境的影响较大,野外检核条件也较少,所以,GPS观测量中经常包含有粗差,虽然经过精密的基线解算,已经剔除了大部分的粗差,但是有时仍会残留一小部分粗差,这将严重损害GPS定位的精度,如何处理这些粗差是提高定位精度的关键。
GPS基线向量网的平差处理,通常取各观测时段独立基线作为观测量,可以解决基线向量之间几何相关的问题。而同一时段几何独立的基线向量之间仍是随机相关的[1],国内多种平差软件为了简化计算,也都忽略了这种相关性,对于一般工程应用仍能满足要求,但是对于高精度的GPS网平差,则应考虑这种相关性,使数学模型上更严密。
由于基线向量之间存在较强的相关性,使得粗差的处理变得更加复杂,我们需要引入相关抗差估计的方法。相关观测的抗差估计,已有一些较为成功的方法,如相关分析的方法[2]、基于标准化残差法[3]、以及RECO方案及其改进[4]等。这些方法有各自的优缺点,有的对于相关观测抗差性不强,效果并不明显,有的选取的单位权方差不合适时将直接影响抗差效果,有的降权的效率很高但不够平稳,可能会导致迭代的不收敛。主要介绍一种标准化残差构造的抗差模型,利用中位数计算单位权方差因子,根据具体情况对IGG3的权因子函数进行改进,通过实测GPS基线网的算例,说明了该方法的可靠性与实用性。
1 GPS基线网相关抗差估计方案
设有线性模型

ε为相关观测随机误差向量,且E(ε)=0,先验权阵为p,误差方程为


一般,权因子γi采用IGG3函数计算。有时,为使降权更加平稳,将IGG3降权段的平方去掉,得到的权因子函数为
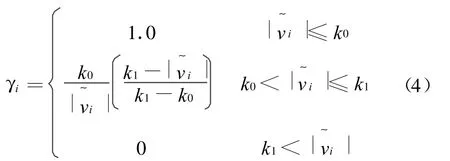

式中:vi为第i个观测值残差;qvi是vi的权倒数;σ0是由中位数计算的单位权方差因子,其计算公式可取为[5]

式中,MEDIAN是中位数的计算函数。
k0和k1为阈值,实际计算中,k0通常取3.0~5.0,k1通常取8.0~10.0。
抗差估计需要迭代,其迭代计算公式为
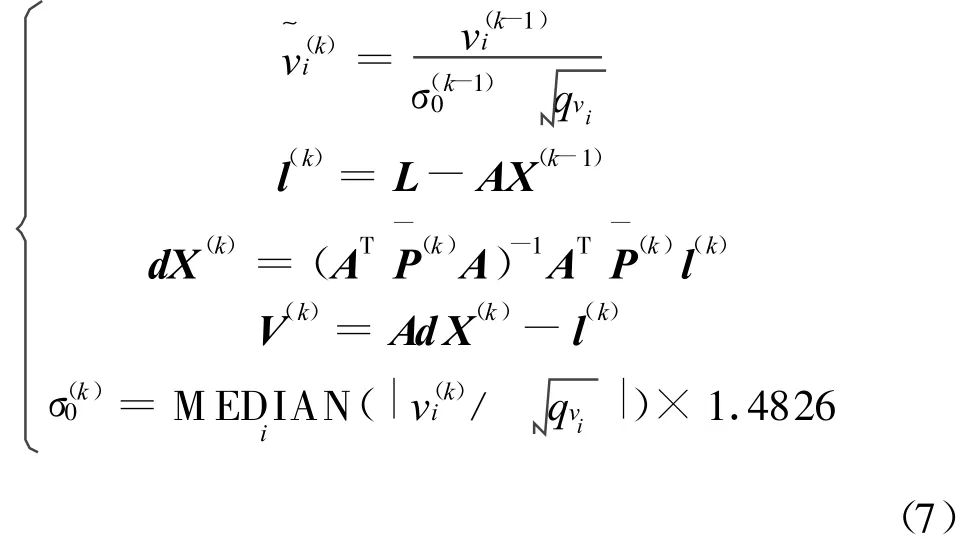
式中,k>1,k=1是进行最小二乘估计,权倒数qv在迭代过程中保持不变,当参数的两次估值之差绝对值的最大值小于迭代精度时,停止迭代,此时就可得参数估值的抗差解。
单位权中误差计算公式为

n0是权因子等于0的观测值个数,即被淘汰的观测分量数。
这样构造的抗差模型具有以下特点:
1)由中位数计算的单位权方差因子与标准化残差结合具有更好的抗差性,而且可以克服由于σ0取值不当而影响抗差效果的不足;
3)根据实际情况,当降权过快导致迭代不收敛时,使用对IGG3改进的权因子函数可使降权更加平稳;
2 GPS基线网平差验后单位权方差的检验

则接受H0假设,检验通过;反之,则拒绝H0,接受 H1,未通过检验,认为观测值中含有粗差或验前权选取不合适。
在GPS网的最小二乘平差完成后,进行χ2分布检验,若未通过检验,则需进行抗差估计,计算完成后还需进行χ2分布检验,若还未通过检验,则说明验前权阵选取不合适,需要通过整网的赫尔默特方差分量估计[7]进行调整。
3 算例分析
基于C#语言,编写了高精度GPS网平差与抗差估计程序,用于验证抗差模型的可靠性与实用性,程序能够实现数据文件的读取、最小二乘平差、抗差估计、结果文件输出等主要的功能。
某一实测GPS控制网如图1所示,网中共有6个点,其中JZ01、JZ02为已知点,共观测了6个时段,各个时段几何独立的基线向量个数分别为:3,3,3,3,3,2,即共有17条基线向量观测值参与平差。

图1 GPS基线网
计算数据采用该网的基线解算文件,已通过了基线重复性和独立闭合环检验,直接提取基线观测量和协方差阵。
3.1 方案设计
方案0:取先验单位权中误差σ0=1。经过LS估计所得验后单位权方差为^σ0=1.14,通过 χ2分布检验,认为观测值中无粗差,再进行抗差估计,与最小二乘结果完全相同;
方案1:在第一时段JZ02-YJG的dx观测分量上加入-0.1 m的粗差;
方案2:在第二时段Jx02-Jx03的dz观测分量上加入0.2 m的粗差;
方案3:方案1的基础上,在第二时段Jx02-YJG的dx观测分量上加入0.01 m;
方案4:在方案2的基础上,在第五时段YJGJx02的dz观测分量上加入-0.3 m的粗差;
方案5:在方案4的基础上,在第三时段Jx01-Jx02的dx观测分量上加入0.08 m的粗差;
方案6:分别在第六时段JZ01-Jx02各个观测分量上加上-0.2 m,0.3 m,0.2 m的粗差
对方案1~6进行分别进行LS估计和抗差估计,抗差估计中k0取3.0,k1取8.0,迭代收敛条件eps=0.0001 m.
3.2 平差结果比较
从表1可以看出:当观测值中不含粗差时,最小二乘估计与抗差估计结果相同,方案1~6中使用不同的加粗差方案时,无论是单位权中误差还是点位误差都明显增大,无法通过检验,而经过抗差估计后,均可通过检验,且与不含粗差时最小二乘估计结果相差很小。
分别取先验单位权中误差 σ0=0.01,0.1,0.2,表中后验单位权中误差变为相应的倍数,均可通过χ2分布检验,其它结果不变。

表1 抗差估计与最小二乘结果比较表
3.3 粗差识别
对比表1和方案1~6可看出:等价权因子γi=0的观测分量,都是所加粗差的分量;γi=0的观测值之残差,且与所加粗差的符号相反,绝对值大致相同。需要说明的是,方案3中,虽在第二时段Jx02-YJG的dx观测分量上加入了0.01 m的粗差,但由于数值较小,对观测值精度影响很小,只是怀疑有粗差而被降权,并没有完全剔除,这样也相当于保留了部分真实的观测信息。总的来说,该抗差模型对粗差的识别与处理是较为准确可靠的。
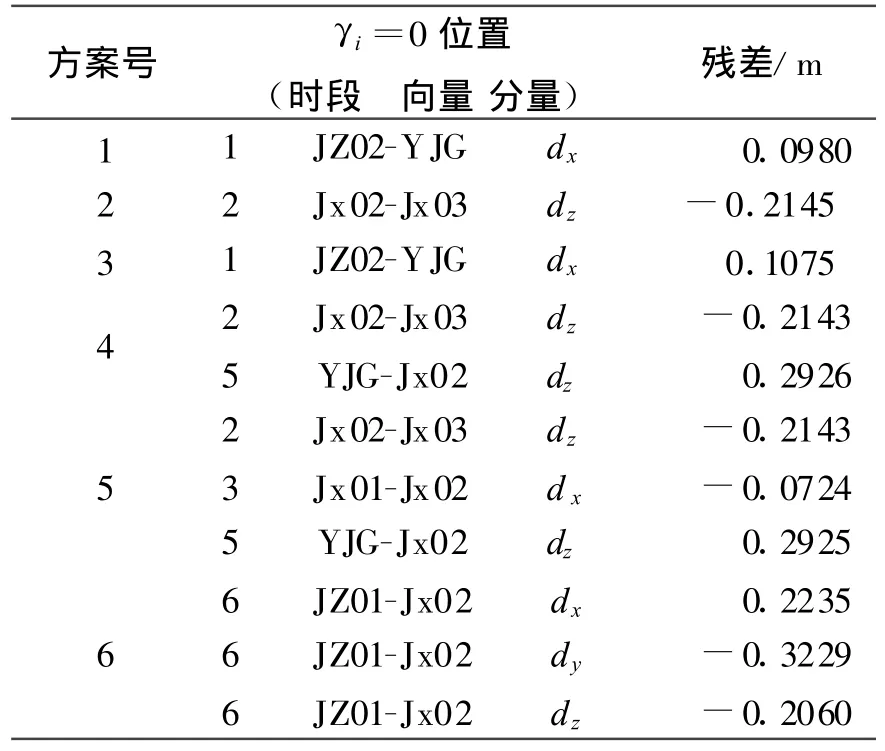
表2 粗差识别
3 结 论
1)由于标准化残差和中位数本身都具有一定的抗差性,将它们结合在一起能够有效消除或减弱观测粗差对平差成果的影响,而且克服了一些抗差模型中先验单位权中误差σ0取值不当影响抗差效果的缺陷,适合于高精度的GPS基线网平差;
2)针对实际情况,对IGG3权因子函数的改进,使降权不仅有效而且平稳;
3)当网中不含粗差时,该抗差模型与最小二乘平差所得结果一致,当网中含有粗差时,该抗差模型对粗差的位置和大小可以做出较为准确的识别和估计,与传统粗差探测方法相比具有较大的优势,将更有利于GPS数据后处理的自动化。
[1] 黄观文.GPS精密单点定位和高精度GPS基线网平差研究与软件实现[D].西安:长安大学,2009.
[2] 陶本藻,姚宜斌,施 闯.基于相关分析的粗差可区分性[J].武汉大学学报◦信息科学版,2004,29(10):881-883.
[3] 余学祥,吕伟才.基于标准化残差的相关观测抗差估计模型[J].武汉测绘科技大学学报,1999,24(1):75-78.
[4] 赵庆海.高精度GPS向量网抗差估计[J].测绘学报,2004,33(1)43-46.
[5] 宋力杰.测量平差程序设计[M].北京:国防工业出版社,2009.
[6] 李征航,黄劲松.GPS测量与数据处理[M].武汉:武汉大学出版社,2005.
[7] 崔希璋,於宗俦,陶本藻,等.广义测量平差[M].2版,武汉:武汉大学出版社,2009.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
科学(2020年5期)2020-11-26
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
中国惯性技术学报(2019年3期)2019-10-15
中国生殖健康(2019年8期)2019-01-07
综艺报(2018年17期)2018-09-14
舰船电子对抗(2016年5期)2016-12-13
航天器工程(2014年5期)2014-03-11