4桥臂逆变器的分序控制策略研究
2011-04-26 06:03陈红兵张兴
电气传动 2011年2期
陈红兵,张兴
(1.襄樊学院 物理与电子工程系,湖北 襄樊 441053;2.合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
1 引言
随着电力电子技术的发展,各种非线性负载及不平衡负载的应用越来越普遍,常要求逆变器具有带不平衡负载或非线性负载的能力,这时传统的三相3桥臂逆变器就显得无能为力。为了对这几类负载供电,常采用的方法是在传统3桥臂逆变器和负载之间加一个△/Y变压器,从而使得这种电源体积较大,成本也较高;另一种方案是采用分裂电容式三相逆变拓扑,三相逆变器等效成为3个独立单相半桥,控制比较简单[1],但存在直流电压利用率低、直流侧电容寿命短、需要对分离电容电压进行平衡控制等缺点。4桥臂逆变拓扑是近几年来研究比较广泛的一种逆变拓扑结构,它直接对中性电流进行控制,具有控制灵活、无需大直流电容和直流电压利用率高等优点。
4桥臂逆变器能够很好地解决带不平衡负载和非线性负载的问题,但效果很大程度上依赖于逆变器控制策略。常用控制策略有:内环空间矢量电流调节器和外环同步坐标比例积分控制的双环控制[2-4];基于对称分量法形成多环控制[5];基于极点配置的PID电压单环控制策略[6];大多数控制方法在不同程度上改善了逆变器输出电压的对称性,但没有彻底地解决4桥臂逆变器带不平衡负载或非线性负载时,逆变器输出电压的对称性问题,在此,本文采用一种新颖的分序算法和基于此算法的控制策略,使逆变器输出的电压波形在稳态时非常对称,并且THD很小。
2 4桥臂逆变器的数学模型
4桥臂拓扑结构见图1,第1桥臂中点通过电感Lf与负载中性点相连。根据基尔霍夫定律可建立逆变器abc坐标系下的数学模型,然后将abc坐标系下的数学模型变换到同步旋转坐标下,得到旋转同步坐标下的数学模型如下:
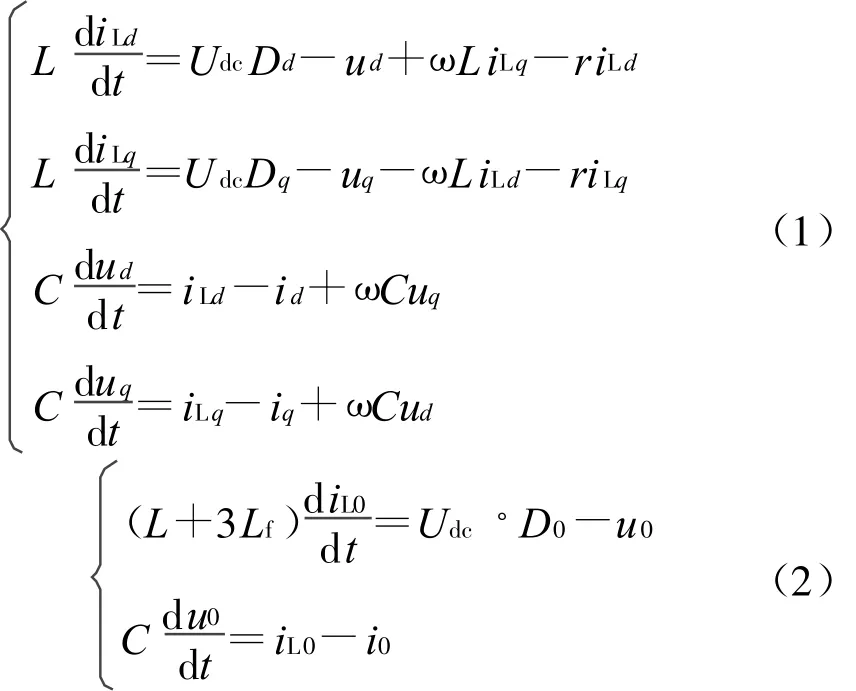
直流侧电流为

图1 4桥臂逆变器拓扑图
Fig.1 The topology of four-leg inverter
3 分序前馈解耦控制系统设计
3.1 分序算法[6]
根据对称分量法,一组不对称的相量(如三相电压、三相电流)可以被分解为正序、负序和零序分量,对称分量一般算法为
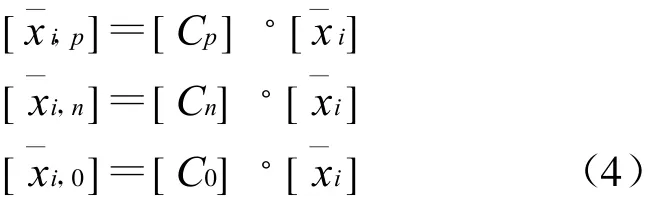

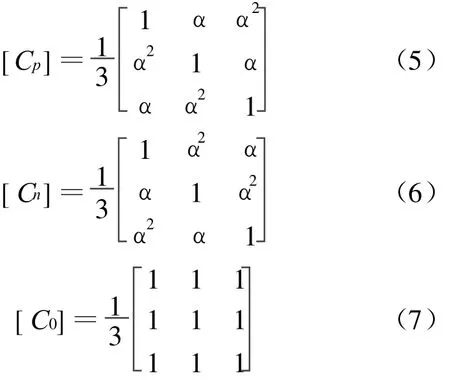
xabc表示三相信号(如4桥臂逆变器的滤波电感电流或负载电压),其数学表达式设为

相应的相量表达式如下,

为了得到相量,需构造一个虚部,可以把=(ωt+φabc)延时 1/4周期,而得到虚部。本文中1/4周期的延时采用全通滤波器实现[7]。
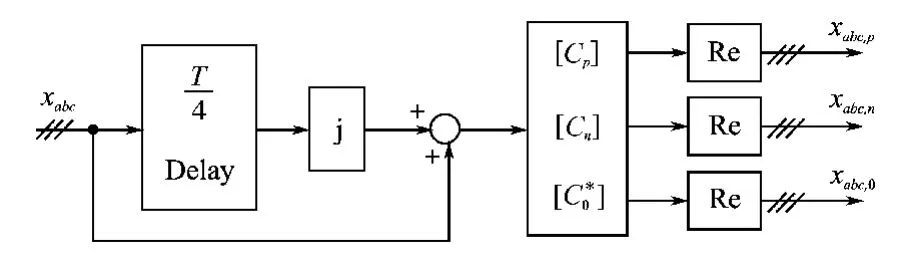
图2 分序算法Fig.2 Decomposition sequence algorithm
变流器旋转坐标系下的数学模型如式(1)、式(2),dq轴之间存在耦合项,本文采用前馈法消除dq通道间的耦合项,于是提出基于对称分量法前馈解耦策略[5-6]。下面以正序分量为例,前馈解耦控制系统框图如图3所示。对负序和零序分量采用相同控制方法进行控制,这里不再赘述。

图3 系统控制框图Fig.3 Block diag ram of control system
3.2 电流环的设计[4,7]
采用前馈解耦后,控制系统中每个电流环都是一个SISO系统,以正序d轴电流控制为例进行电流环的设计,正序d轴电流环如图4所示。

图4 电流环控制结构框图Fig.4 Current loop control block diagram
为了保证电流环跟踪的快速性,可将电流环设计为典型I型系统。只需以PI调节器零点抵消控制对象的极点即可。设计电流调节器主要考虑以下两点:1)为了克服负载电流谐波,电流内环频带应远低于开关频率,通常取 ωi<fi/5=2 kHz;2)为了实现对电流指令的快速跟踪,电流内环频带应远高于输出频率(=50 Hz),常考虑 ωi>10fo=500 Hz。综合考虑上述因素,可使电流内环系统的自然谐振频率在1 kHz左右调整。另外,根据电流环控制的目标,将系统设计为欠阻尼系统,选定系统的阻尼比ξ=0.707。设计电流环的动态特性指标如下:调整时间ts<2 ms,最大超调量 σ<10%,上升时间tr=0.3 ms。最后综合考虑电流环的动静态特性和性能指标,电流调节器参数确定为KiP=0.052,Kil=0.78。
3.3 电压环的设计[5]
若电压外环采用PI调节器,则电压外环的控制结构图如图5所示。

图5 电压环控制结构框图Fig.5 Voltage loop control block diagram
开环传递函数为
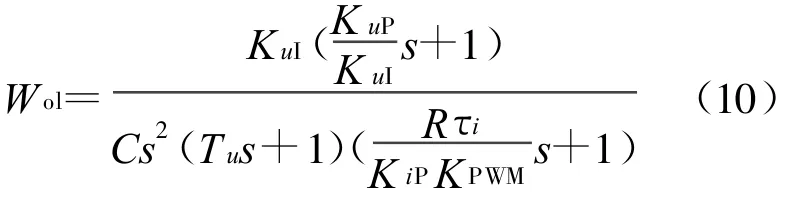
由于电压外环的主要作用是稳定负载电压,故对外环控制系统整定时,不仅要考虑电压环的跟随性能,还应考虑电压环的抗扰性能。为此,可对电压外环开环传递函数按典型Ⅱ型系统来设计,本文电压调节器的参数为=9.6,=1.2×10-2。电压环的设计方法类似于电流环设计,此处不再详述。
4 仿真结果和实验结果分析
采用Matlab软件仿真验证系统的特性,仿真参数为:额定功率20 kW,输出额定电压有效值220 V,直流侧电容C=2 mF,直流侧电压=680 V,滤波电感L=5 mH,Lf=2.5 mH,滤波电容C=6 μ F,开关频率 10 kHz。
本文给出两种控制策略仿真和实验结果,其中一种控制策略是正序旋转坐标控制策略(传统控制策略);另外一种是本文所提的分序前馈控制策略。下面给出了逆变器在两种控制策略控制下的部分仿真结果,并进行了对比分析。
图6是正序同步旋转坐标系下d轴的给定和反馈(q轴上的波形类似),因为负序分量在正序同步旋转坐标中是2次谐波,都显示了PI调节器不能实现无静差控制,证明当逆变器带非平衡负载时,基于正序同步旋转坐标系下的比例积分双环控制策略所设计的控制系统不能有效的工作。
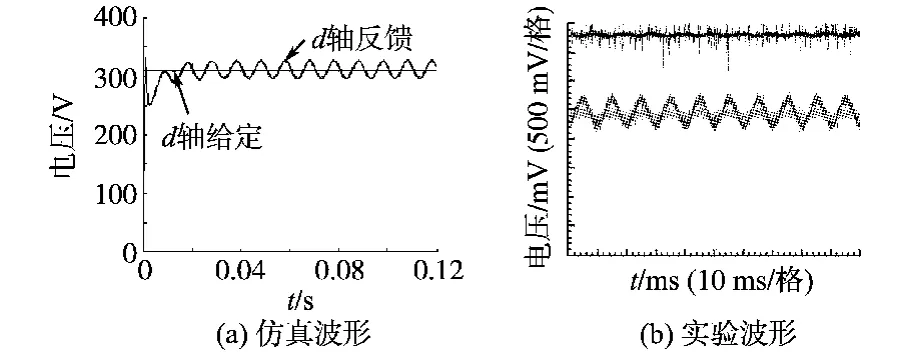
图6 传统控制策略的仿真和实验波形Fig.6 Simulation and experimental waveforms of the conventional control method
图7是本文所提控制策略d轴的给定波形与反馈波形,在正序同步旋转坐标系下负载电压的给定是直流量,从仿真结果(见图7a)和实验结果(见图7b)可以看出,系统进入稳态时可以很好地跟踪给定。以上结果表明本文所提控制策略明显优于传统控制策略。

图7 本文所提控制策略的仿真和实验波形Fig.7 Simualtion and experimental waveforms of the proposed control method
逆变器带不平衡负载时负载的电压波形如图8所示。可以看出逆变器进入稳定工作状态时,输出电压波形对称度较好,Matlab软件计算其相电压的总畸变率 THD=0.55%。由于负载不平衡,逆变器输出的电流波形并不对称,如图9所示。实验对比研究证明所提的控制策略较传统正序同步旋转坐标系下的双环控制策略优越得多。

图8 三相负载电压波形Fig.8 Voltage waveforms of three-phase loads
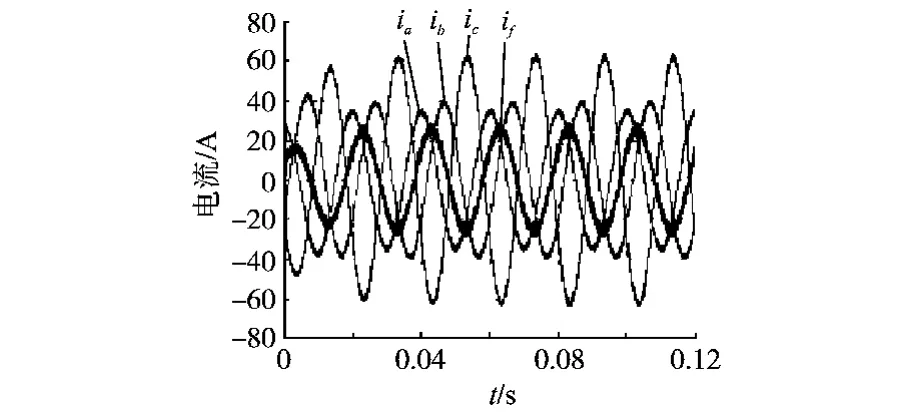
图9 电感电流及第4桥臂电流波形Fig.9 Current waveforms of inductors and four-leg
5 结论
本文把分序前馈控制思想应用到4桥臂逆变器的电流控制中,实现了电流无静差控制,并且在3个dq0坐标系中构建了逆变器的控制系统。不仅克服了传统dq坐标系下双闭环控制系统中反馈电流含有2次谐波的缺点,而且实现了正序分量、负序分量、零序分量的独立控制,解决了逆变器在不平衡负载或非线性负载条件下,输出电压的对称性问题。仿真和实验证实了所提控制策略的正确性。
[1] 孙驰,毕增军,魏光辉.一种新颖的三相4桥臂逆变器解耦控制的建模与仿真[J].中国电机工程学报,2004,24(1):1-7.
[2] 张崇巍,张兴.PWM整流器及其控制[M].北京:机械工业出版社,2003.
[3] Zhan Changjiang,Atputharajah Arula mpalam.Four-wire Dynamic Voltage Restorer Based on a T hree-dimensional Voltage Space Vector PWM Algorithm[J].IEEE T ransactions on Power Electronics,2003,18(4):1093-1102.
[4] Song Hong-Seok,Nam Kwanghee.Dual Current Control Scheme for PWM Converter under Unbalanced Input Voltage Conditions[J].Industrial Electronics,IEEE T ransactions,1999,46(5):953-959.
[5] Vechiu I,Curea O,Camblong H.Digital Control of a T hreephase Four-leg Inverter Under Unbalanced Voltage Conditions[C]∥Power Electronics and Applications,2007 European Conference on,2007:1-10.
[6] 林金燕,王正仕,陈辉明,等.一种高性能三相四桥臂逆变器控制器的设计[J].中国电机工程学报,2007,27(22):101-105.
[7] 张兴,陈玲,杨淑英,等.离网型小型风力发电系统逆变器的控制[J].电力系统自动化,2008,34(23):95-99.
修改稿日期:2010-09-08
猜你喜欢
山东冶金(2019年3期)2019-07-10
消费导刊(2018年10期)2018-08-20
中国实用神经疾病杂志(2018年9期)2018-05-25
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年20期)2016-04-11
电气传动(2015年4期)2015-07-11
电源技术(2015年9期)2015-06-05
电测与仪表(2015年20期)2015-04-09
电测与仪表(2015年3期)2015-04-09
电源学报(2015年6期)2015-02-18