
一种基于EMD的系统误差分离方法
2011-04-26 02:30:58李世平
中国测试 2011年3期
李世平,付 宇,张 进
(第二炮兵工程学院,陕西 西安 710025)
0 引 言
对仪器的测量误差进行修正,提高测量准确度,其关键技术是如何分离测量数据中的系统误差与随机误差。测量误差分离程度的好坏直接关系到修正的效果。
测量误差的分离方法现在使用较多的主要有最小二乘回归法、中值滤波法、傅里叶级数逼近法、小波和小波包分解法等。最小二乘回归法在误差分离中存在模型阶数确定困难;中值滤波法误差分离准确度难以提高;Fourier级数逼近、小波和小波包分解法,都属于基于基函数的分离方法,Fourier级数逼近法采用三角基函数逼近,选用不同的基函数,会得到不同的分离结果,但基函数的选择本身就是难点。针对上述问题,提出了基于经验模态分解(EMD)误差分离的一种新方法,EMD分解的基函数是不确定的,它在分解过程中依赖于误差信号本身,是自适应的。对于不同的误差信号,基函数的选择是不同的,也可以说这种分离方法采用的是一种自适应广义基。尽管无法给出基函数的确切表达式,但由于依赖于误差信号本身是自适应的,所以能够通过这样的广义基得到非常好的分离效果。由于EMD分解是自适应性分解,这种自适应性表现为在不同的局部时间内其时间尺度是可以不同的,上一级基本模式分量的所有时间尺度不一定需要全部小于下一级的时间尺度,各个基本模式分量内时间尺度的变化完全是由误差信号本身的特性决定的[1]。
1 误差特征分析
根据误差理论可知,误差按照其性质和特点可以分为系统误差、随机误差和粗大误差3种。
1.1 系统误差
系统误差是指在重复性条件下,同一被测量无穷多次测量结果的均值与该被测量真值之差,其主要特征是具有规律性[2]。由于仪器自身的测量原理、组成结构、存放与使用环境因素的影响和操作的直接作用,使得系统误差具有一定的变化规律。存在有不变的系统误差、线性变化的系统误差、指数变化的系统误差、周期函数变化的系统误差和复杂规律变化的系统误差5种形式。

图1 系统误差的特征
图1所示为各种系统误差随时间变化而表现出不同的特征。曲线a为不变的系统误差;b为线性变化的系统误差;c为指数函数系统误差;d为周期函数系统误差;e为复杂规律便变化的系统误差[2]。
1.2 随机误差
随机误差是指相同测量条件下,误差的大小和符号的变化均没有固定规律。因此,随机误差的特征是没有规律性、不可预见性和不可控制性。然而就其的总体而言,随机误差具备有界性、对称性和抵偿性,具有统计规律性。随机误差用概率统计的方法进行处理。
1.3 粗大误差
超出在规定条件下预期的误差,此误差较大,明显歪曲测量结果,通常不包含在合理的测量数据中。
2 经验模态分离原理
2.1 EMD方法原理[3]
美国宇航局的Huang等于1998年提出了固有模态函数(IMF)的概念以及将任意信号分解为固有模态函数的方法,即经验模态分解(EMD)。由EMD分解产生的IMF是根据信号本身的特点自适应得到的,分解出来的固有模态函数满足以下2个条件:
(1)在整个数据序列中,极值点和过零点的数目相等或最多相差1个。
(2)在任意时间点上,信号极大值确定的上包络线和极小值确定的下包络线的均值为零。
EMD分解就是将信号分解成一系列表征信号特征时间尺度的IMF,其结果是将信号中不同尺度的波动或趋势逐级分解,产生一系列具有不同特征尺度的数据序列,每一序列就是IMF。
信号数据x(t)进行EMD分解的步骤如下:
(1)首先找出x(t)上所有极值点,将所有极大值点和所有极小值点分别用三次样条插值函数拟合出x(t)上、下包络线,上、下包络线间应包含所有的信号数据。将2条包络线的平均值记为m1,x(t)与m1的差记作h1,即

在理想情况下,h1应为一个IMF分量。但事实上,由于包络拟合中过冲和欠冲现象的存在,会产生新的极值点。因此,分解必须进行多次。
在第2次分解中,把h1看作待处理数据,其包络均值为m11,则有

该过程重复k次,得到

直到h1k满足IMF的条件为止,于是得到第1个IMF分量,记作

它表示信号数据序列中最高频率的分量。
为了保证IMF分量有意义,必须确定一个停止准则。为此,Huang等人提出限制标准差SD的值来停止分解。SD的表达式如下:
当SD小于预先设定的值时,分解就停止。SD的值常取0.2~0.3之间。
(2)用x(t)减去c1(t),得到去掉高频成分的新数据序列r1(t)为

将r1(t)视为新的x(t),重复以上过程,依次得到第2个IMFc2(t),…,cn(t)或rn(t)满足终止条件分解终止。由此可得x(t)的分解式为

式中:rn(t)——残余函数,代表信号的趋势项;
c1(t),c1(t),…,cn(t)——信号从高到低不同频率的分量。
通常,EMD分解出来的前几个IMF分量集中了原信号中最显著、最重要的信息[3]。
2.2 系统误差的分离
按照系统误差的特点,虽然存在有各种不同形式,但其变化是有规律的。根据该文前面介绍的内容可知,通过EMD分解得到的IMF分量和趋势项来确定、提取系统误差。
从IMF分量和趋势项函数中判定系统误差,应该按照系统误差的形式进行确定,根据系统误差的诸多形式,趋势项函数一定属于某种形式的系统误差[2,4]。如何提取按周期规律变化的系统误差,应当按照系统误差的性质和其确定的规律性特点来判定,当存在不同频率IMF分量函数时,低频IMF分量函数应属于周期性系统误差,高频IMF分量函数是否属于周期性系统误差是不能直接确定的。该文采用自相关分析的方法对高频IMF分量函数进行提取周期性系统误差。
自相关分析的目的是确定信号在不同时间的依赖关系或相似程度[1],是提取信号周期的常用方法,可提取混有噪声的周期信号,但前提条件是信噪比较高[5]。对于高频IMF分量函数的系统误差分离方法,实际上是小周期性系统误差的分离。首先采用经验模态分解法将误差分解到各个IMF分量函数,达到降低噪声误差的作用;然后采用自相关分析法,判别每个IMF分量中是否含有淹没于噪声误差中的周期信号,进而利用频谱图,提取该系统误差的频率;最后对含有的小周期性系统误差进行拟合。
2.3 随机误差的分离
对于合理测量误差数据,它是由系统误差和随机误差两部分组成的,在一定条件下,当已知其中某一误差分量,另一部分误差分量可求出。在使用EMD误差分离方法分离出测量误差的系统误差分量后,如若系统与随机误差是代数和组合形式,随机误差分量通过测量误差数据减去系统误差即可得到。否则,使用单独的分离随机误差的方法分离。
3 系统误差的分离与仿真
按照系统误差的变化特征,分别对系统误差为线性变化、指数变化、幂函数变化和周期变化的4种情况进行仿真实验,说明EMD分解提取系统误差的有效性。
设仿真误差x(t)由两部分组成,一部分是干扰误差函数 s(t),另一部分是系统误差函数 d(t),即

为了仿真方便,这里假设干扰误差函数s(t)的表达式为

当然干扰函数也可以取任何其他函数或白噪声函数。
3.1 系统误差为线性变化
系统误差 d(t)的表达式为

对误差x(t)进行EMD分解,其结果如图2所示。
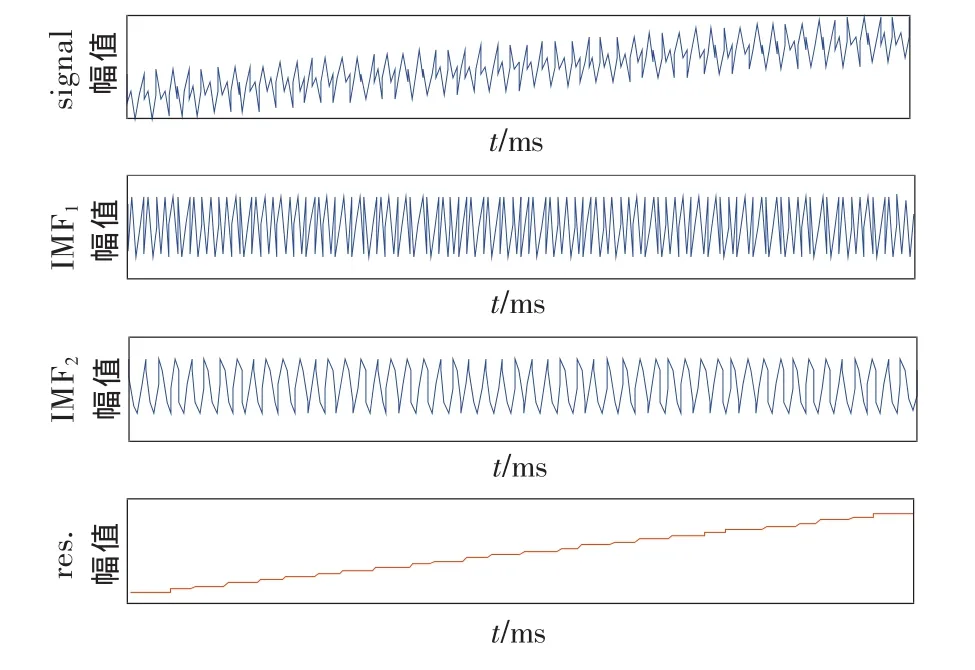
图2 EMD分解结果
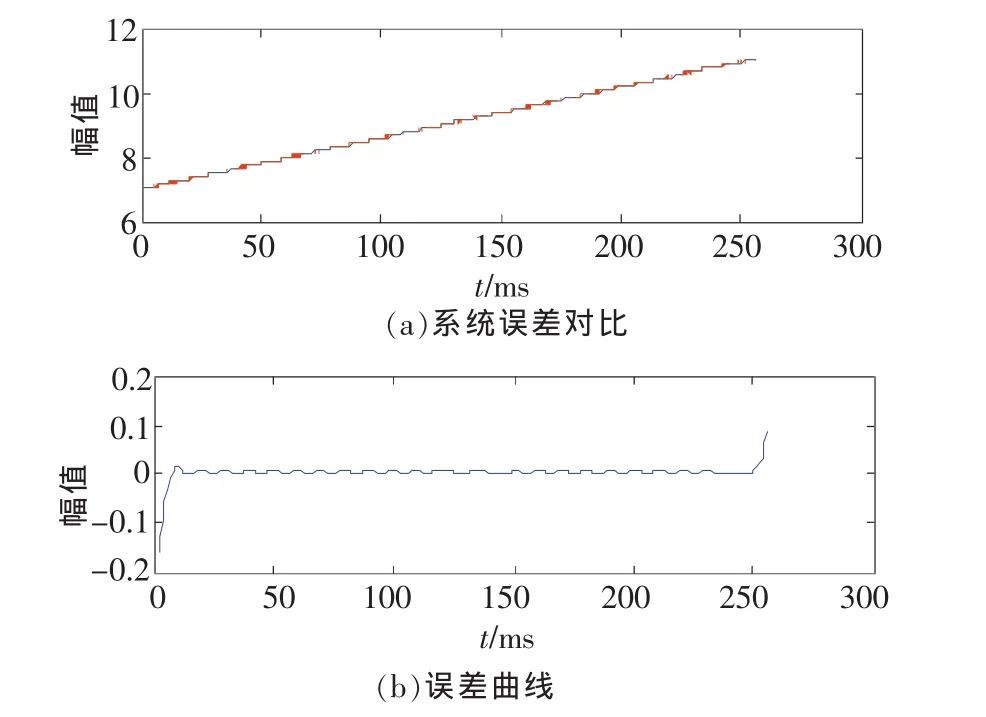
图3 提取的系统误差与实际系统误差比较
图2中,第1行为误差x(t),第2行为100Hz的正弦分量,第3行为50Hz的正弦分量,第4行为余项,即线性变化的系统误差。图3给出了提取的系统误差曲线与实际系统误差曲线的比较及误差曲线,图3(a)给出了提取的系统误差与实际系统误差的对比,其中实际系统误差用实线绘制,提取的系统误差用虚线绘制。可以看到,2条曲线吻合度较高,利用EMD可以有效地提取线性变化的系统误差。图3(b)给出了它们的误差曲线图,可以看到,由于EMD算法中的端点效应[6-7],使得数据的两端误差较大。
3.2 系统误差为指数变化
系统误差 d(t)的表达式为

对误差x(t)进行EMD分解,其结果如图4所示。图5给出了提取的系统误差曲线与实际系统误差曲线的比较及误差曲线。

图4 EMD分解结果
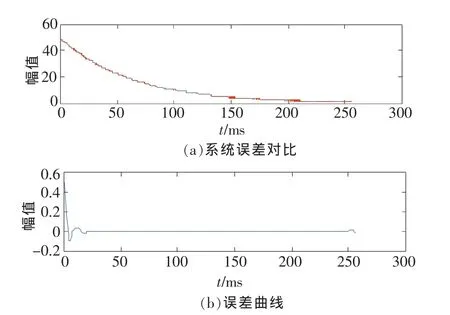
图5 提取的系统误差与实际系统误差比较
3.3 系统误差为幂函数变化
系统误差 d(t)的表达式为

对误差x(t)进行EMD分解,其结果如图6所示。图7给出了提取的系统误差曲线与实际系统误差曲线比较及它们的误差曲线。
3.4 系统误差为大周期的周期变化
设系统误差d(t)的表达式为

以均值为零、方差为1的正态分布白噪声作为干扰误差函数,对误差x(t)进行EMD分解,其结果如图8所示。图9给出了提取的系统误差曲线与实际系统误差曲线的比较以及它们的误差曲线。分离结果表明EMD能够有效分离出大周期的周期性系统误差。
3.5 系统误差为小周期的周期变化
当周期性系统误差比白噪声干扰误差函数的周期大得多时,分离效果同线性函数、指数函数、幂函数的效果相当,达到了分离要求;如若周期性系统误差d(t)的周期与干扰误差的周期相接近时,EMD的分离效果较差。
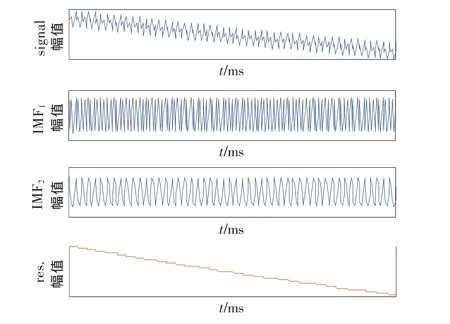
图6 EMD分解结果

图7 提取的系统误差与实际系统误差比较
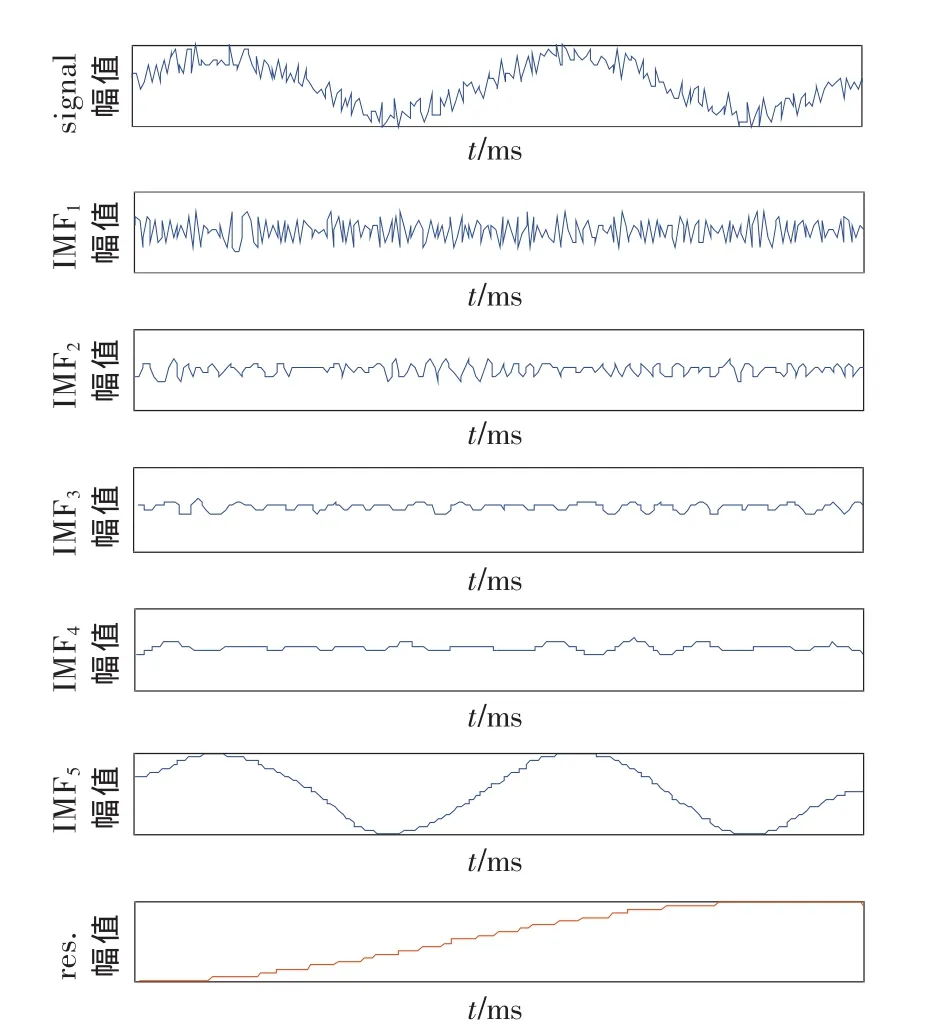
图8 EMD分解结果
设系统误差d(t)的表达式为

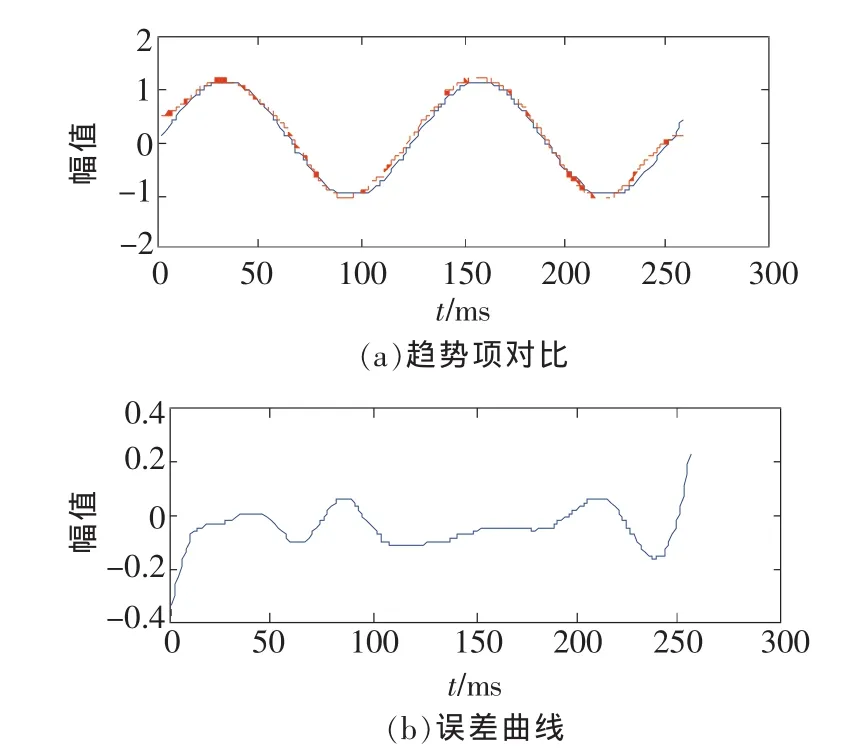
图9 提取的系统误差与实际系统误差比较
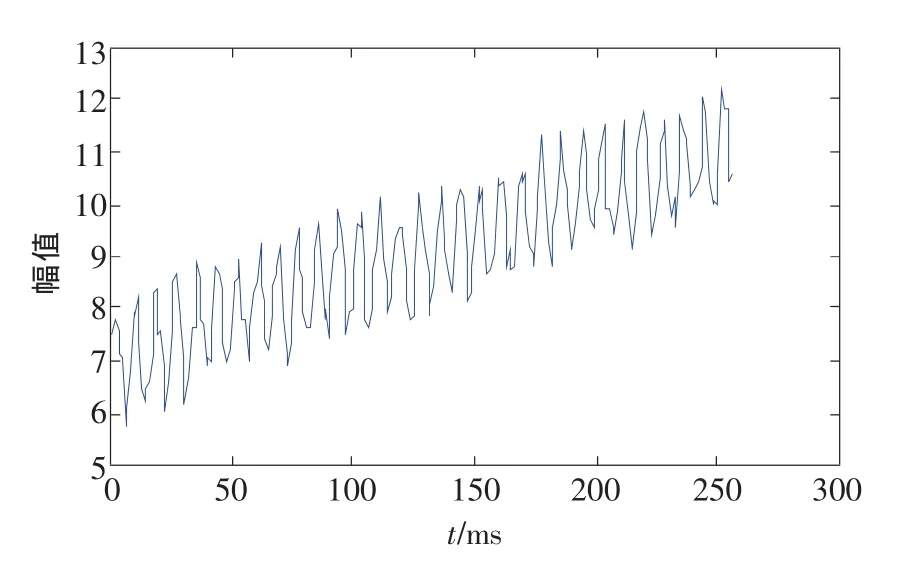
图10 误差时域图

图11 EMD分解结果
以均值为零、方差为1的正态分布白噪声作为干扰误差,如图10所示。对其进行EMD分解,其结果如图11。
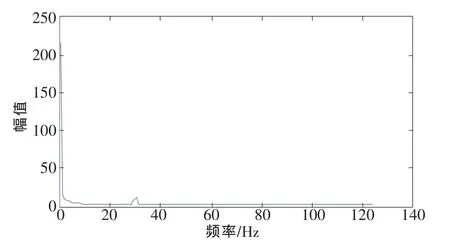
图12 误差频谱

图13 IMF的自相关函数图

图14 IMF1频谱图
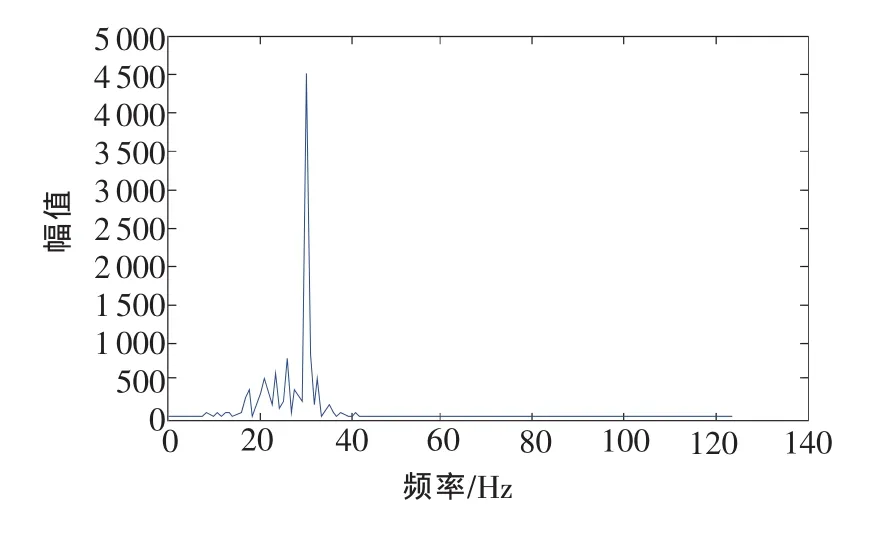
图15 IMF2频谱图
从图11中可以看出,线性变化的系统误差很容易就被分离出来,而小周期的周期性系统误差却很难与干扰误差分离,且EMD的分解含有很多虚假趋势项。由于经验模态分解方法是依据信号时域波形极值的自适应性分解,当系统误差的周期远大于随机误差时效果显著,如3.1~3.4;当系统误差周期接近于干扰误差周期时,分离效果不理想,如 3.5。
从图11中发现,在IMF1-IMF4的时域图中,几乎分辨不出哪层含有周期性的系统误差。图12为该误差的自相关频域图,能判断出含有频率为30 Hz的周期分量。
图13为EMD分解后各层IMF的自相关函数图,由上至下分别为 r1,r2,r3,r4。经过对 r1,r2,r3,r4分别作出各自的频谱图,可以明显发现IMF1、IMF2两分量中含有频率为30Hz的周期性系统误差,如图14、图15所示。
4 结束语
经验模态分解法作为既适于线性、平稳信号,又适于非线性、非平稳信号的一种新的信号处理方法,已在许多领域得到应用。该文将经验模态分解法运用于测量误差数据的系统误差分离,通过仿真验证,该分解方法能够有效地应用于测量误差数据的分离,并成功地将具有不同变化特征的系统误差进行有效提取,尤其是与自相关分析结合的经验模态分解方法在分离周期变化的系统误差上取得了较好的效果,为系统误差分离提供了一种新的方法。
[1]沈国际.振动信号处理技术在直升机齿轮箱故障诊断中的应用[D].长沙:国防科学技术大学,2005.
[2] 费业泰.误差理论与数据处理[M].北京:机械工业出版社,2004.
[3] 何正嘉,訾艳阳,张西宁.现代信号处理及工程应用[M].西安:西安交通大学出版社,2007.
[4] 陈隽,徐幼麟.经验模分解在信号趋势项提取中的应用[J].振动、测试与诊断,2005,25(2):101-104.
[5] 赵海峰.基于HHT的非平稳信号故障特征提取研究[D].大庆:大庆石油学院,2007.
[6] 程军圣,于德介,杨宇.Hilbert-Huang变换端点效应问题的探讨[J].振动与冲击,2005,24(6):41-42,47.
[7] 胡劲松,杨世锡.EMD方法基于AR模型预测的数据延拓与应用[J].振动、测试与诊断,2007,27(2):116-120.
猜你喜欢
中学生数理化·八年级物理人教版(2021年12期)2021-12-31 03:23:02
基层中医药(2021年12期)2021-06-05 06:56:26
应用数学(2020年2期)2020-06-24 06:02:40
智族GQ(2019年9期)2019-10-28 08:16:21
英美文学研究论丛(2018年1期)2018-08-16 03:00:06
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
纺织科学研究(2017年6期)2017-07-03 12:14:15
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
电测与仪表(2015年18期)2015-04-12 00:45:28
