
自适应变步长占空比扰动法在光伏发电MPPT中的应用
2011-04-20 07:27:32薛阳张佳栋
上海电力大学学报 2011年6期
薛阳,张佳栋
(上海电力学院电力与自动化工程学院,上海 200090)
光伏最大功率点跟踪(Maximum Power Pint Tracking,MPPT)技术,是指在温度、光照等外界条件发生变化时,系统通过控制改变太阳电池阵列的输出电压或电流的方法使阵列始终工作在最大功率点上,从而保证光伏阵列始终保持最大功率输出[1].它是太阳能光伏并网发电中的一项重要的关键技术.目前已有多种MPPT控制算法,如恒定电压法、电导增量法.前者控制简单但精度不高;后者跟踪方法简单,被测参数少但会在最大功率点产生震荡.智能处理算法(如模糊控制法、神经网络法)具有较好的动态和稳态性能,但控制复杂较难实现[2-4].
传统干扰观察法因其算法简洁、容易实现,以及与光伏阵列的电气特性参数无关等特点已得到广泛应用,但由于扰动步长固定,当步长较大时会使系统在最大功率点附近产生较大的震荡,造成能量损失,当步长较小时系统搜索时间过慢,效率降低[5].为了得到较高的响应速度和稳态跟踪精度,本文采用一种自适应变步长占空比干扰观察法,通过建立仿真模型来证明其具有较好的跟踪效果.
1 光伏电池的等效模型
光伏电池的等效模型如图1所示[2-4].

图1 光伏电池等效模型
光伏电池的输出特性方程为:

光伏电池模块是由光伏电池元串并联而成的,设有m条n个光伏电池元串并联形成的光伏电池,则此光伏模块的数学模型为:

2 自适应变步长占空比干扰观察法的原理分析
2.1 传统占空比干扰观察法
传统占空比干扰观察法的原理是:控制器在每个控制周期内调节占空比,以一定的步长扰动来改变光伏电池的输出电压,扰动方向可以是电压增大的方向,也可以是电压(或电流)减小的方向.然后检测出干扰后的功率,与干扰前所记忆的功率进行比较,如果干扰后的功率大于干扰前的功率,则说明干扰方向正确,沿着该方向继续干扰;反之,如果干扰后的功率小于干扰前的功率,则说明干扰方向错误,将干扰方向变换后继续干扰,如此循环进行,光伏阵列的实际工作点就可以接近最大功率点,以达到逼近最大功率点的目的[1,2].但由于占空比扰动步长固定,最终系统会在最大功率点附近振荡,这种振荡会造成功率损失.
传统光伏系统最大功率点跟踪是通过DC/ DC变换电路实现的,通过改变电路的占空比D,使其等效输入阻抗与光伏输出阻抗相匹配即内阻等于外阻,以实现光伏电池的最大功率输出.MPPT等效电阻匹配图如图2所示[3].

图2 MPPT等效电阻匹配示意
DC/DC变换电路以Boost电路为基础,光伏电池阵列与Boost电路相接时,假设外部负载仍为纯电阻负载,在忽略Boost电路本身阻抗的情况下,根据Boost电路的阻抗变换关系,得到Boost电路的等效输入阻抗为:

式中:D—— Boost电路的开关占空比;
R——电阻性负载的阻抗.
图3为基于Boost电路的MPPT拓扑结构.
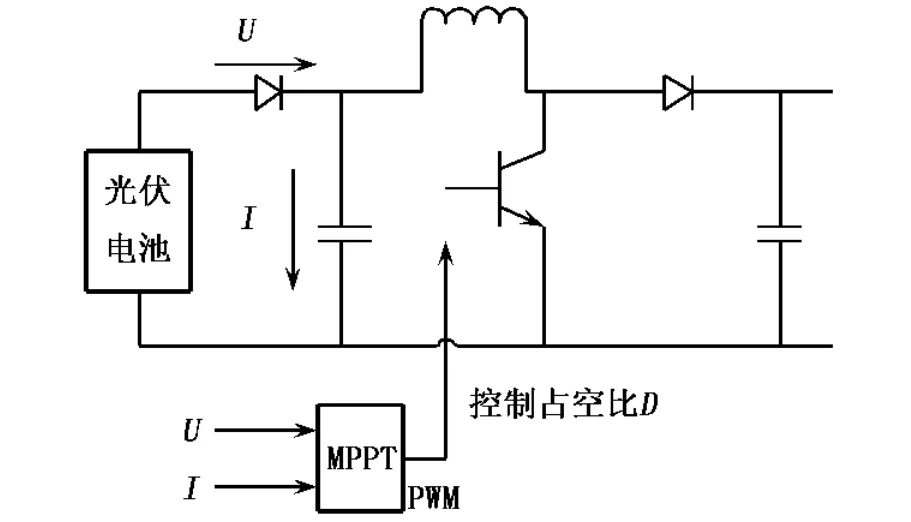
图3 基于Boost电路的MPPT拓扑结构
图4为光伏电池的P-U特性曲线,当P-U曲线斜率为零时,系统处于最大功率点.

图4 光伏电池的P-U特性曲线
图5为光伏电池的P-D关系曲线,通过动占空比D测量输出功率的变化量,得到功率变化的方向.

图5 光伏电池的P-D关系曲线
由图4和图5可知,可以采用PWM信号占空比D作为控制扰动.
2.2 自适应变步长原理
为了克服传统占空比干扰观察法搜集速度慢、系统在最大功率点发生振荡现象的缺点,本文采用自适应变步长占空比干扰观察法,可以使系统稳定工作在最大功率点.改进占空比干扰观察法的核心思想是自适应变步长,在扰动过程中不断地改变扰动步长.
由图4光伏电池的P-U特性曲线可以看出,光伏阵列的d P/d U曲线在最大功率点处的特点是[5-7]:d P/d U>0为最大功率点的左侧;d P/d U= 0为最大功率点;d P/d U<0为最大功率点的右侧.
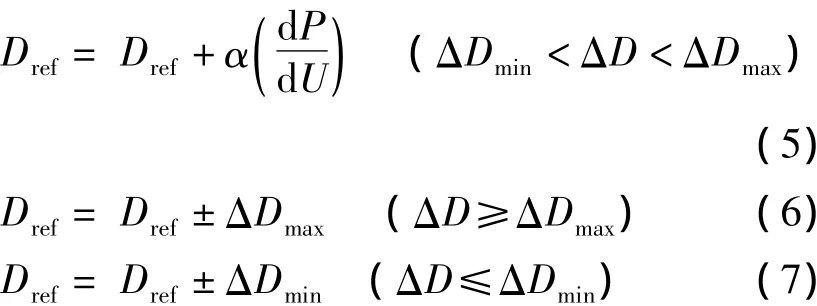
观察光伏阵列P-U曲线的斜率d P/d U的绝对值变化可以看出,逐渐接近最大功率点,d P/d U的绝对值也单调递减,当到达最大功率点时,d P/ d U的绝对值为零.根据光伏阵列的这一特性,可以自适应地调整占空比的步长.占空比扰动ΔD =α(d P/d U)(α为正数,即变步长速度因子,用于调整跟踪速度),占空比扰动步长随着d P/d U的变化而变化,当光伏阵列运行点远离最大功率点时,扰动步长增大,反之则减小,直至接近最大功率点时趋近于零.由于ΔD扰动步长有规定的上限,所以当α(d P/d U)≥ΔDmax时,ΔD=ΔDmax.当α(d P/d U)≤ΔDmin时,ΔD=ΔDmin.
占空比扰动表达式为:
3 自适应变步长占空比干扰观察法的仿真研究
3.1 仿真模型建模
基于自适应占空比扰动观察法原理,运用SFunction编程建立能和Simulink模块库中模块串并联用的功能模块mppt-control,并与固定频率的三角波发生器组成MPPT-PWM模块.将光伏电池通过Boost电路与MPPT-PWM模块相连,得到如图6所示的光伏发电系统仿真控制模型.
MPPT系统的采样时间t=0.01,变步长速度因子α=0.05,以自适应变步干扰观察法的原理和式(5),式(6),式(7)进行S-Function编程.该仿真控制模型中L为3 mH,C为500μF,R为15 Ω[8-10].Repeating Sequemce模块中的三角波的载波频率设置为10 kHz.
3.2 仿真结果分析
本光伏电池模块采用ASTRONERGY型号为CHSM5408M的电池模板,当太阳能光伏方阵输入日照G取1 000W/m2,电池温度t为25℃时,具体参数数值为Isc=5.45 A,开路电压Uoc= 22.2 V,最大功率点电流Im=4.65 A,最大功率点电压Um=18.1 V,在此数据环境下进行仿真.
采用固定占空比干扰观察法的光伏电池输出功率、输出电压、输出电流仿真曲线如图7所示,此时的固定占空比扰动ΔD=0.02.

图6 光伏发电系统的仿真控制模型

图7 采取固定占空比干扰观察法的光伏电池输出功率、输出电压、输出电流仿真曲线
采用自适应变步长占空比扰动观察法的光伏电池输出功率、输出电压、输出电流仿真曲线如图8所示.此时占空比ΔD=α(d P/d U),ΔDmax= 0.05,ΔDmin=0.01.
由图7和图8可以看出,两种方法都能实现最大功率点跟踪,最终的输出电压和输出电流都趋向于理想最大功率点电压Um=18.1 V,电流Im=4.65 A.图7显示系统在0.12 s左右实现最大功率点跟踪后出现震荡,输出电压在18 V附近震荡,振幅在1 V以内;输出电流在4.6 A附近震荡,振幅在0.2 A以内.
图8显示系统在0.08 s左右输出电压稳定在18 V,输出电流稳定在4.6 A,在最大功率点附近的振幅趋向于零.
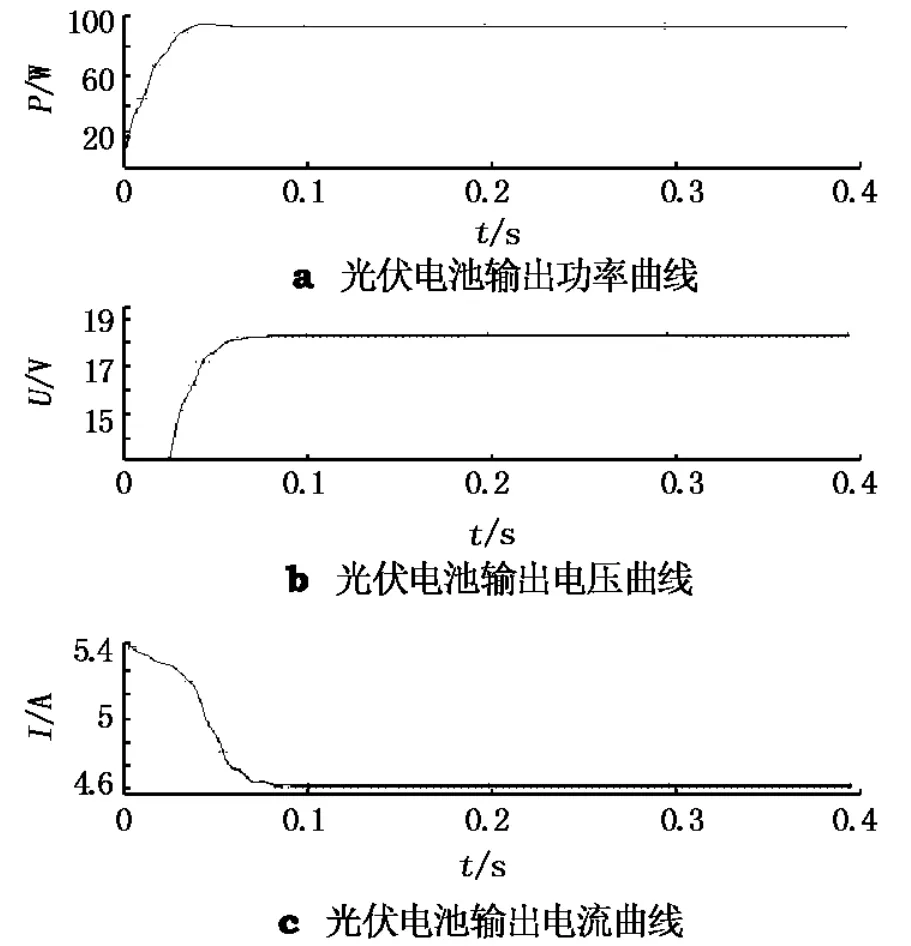
图8 采取自适应变步长占空比扰动观察法的光伏电池输出功率、输出电压、输出电流仿真曲线
通过图7和图8比较可知,自适应变步长占空比扰动观察法较传统的占空比扰动观察法具有更快的搜索速度和更稳定的搜索精度,能有效克服传统占空比观察法在最大功率点处发生震荡所带来的能量损失,提高了光伏发电效率.
4 结语
传统占空比干扰观察法在系统跟踪速度和响应稳态跟踪精度方面存在不足,本文采用自适应变步长占空比干扰观察法,其扰动步长不断变化,具有较强的自适应性,能够随时调整到相应的最优扰动步长,可以使系统的最大功率跟踪效率得到较大提升.
[1]周林,武剑,栗秋华,等.光伏阵列最大功率点跟踪控制方法综述[J].高电压技术,2008,34(6):1 145-1 154.
[2]刘邦银,段善旭,康永.部分阴影条件下光伏模组特性的建模与分析[J].太阳能学报,2008,29(2):188-192.
[3]栗秋华,周林,刘强,等.光伏并网发电系统最大功率跟踪新算法及其仿真[J].电力自动化设备,2008,28(7):21-25.
[4]李炜,朱新坚.光伏系统最大功率点跟踪控制仿真模型[J].计算机仿真,2006,23(6):239-243.
[5]肖俊明,王东云,李燕斌,等.基于遗传算法的占空比扰动法在MPPT中的应用研究[J].电力系统保护与控制,2010,38(15):51-55.
[6]刘邦银,段善旭,刘飞,等.基于改进扰动观察法的光伏阵列最大功率点跟踪[J].电工技术学报,2009,24(6):91-94.
[7]ZHANG Chao,ZHAO An,WANG Jin-jing.A modified MPPT method with variable perturbation step for photovoltaic system[C]//Power Electronics and Motion Control Conference,2009:2 199-2 201.
[8]HAMROUNIN,JRAIDIM,CHERIF A,et al.Measurements and simulation of a PV pumping systems parameters using MPPT and PWM control strategies[C]//Electro Technical Conference,2006:885-888.
[9]吴理博,赵争鸣,刘建政.单级式光伏并网逆变系统中的最大功率点跟踪算法稳定性研究[J].中国电机工程学报,2006,26(6):73-77.
[10]ARMSGONG S,HURLEY W G.Self-regulating maximum powerpoint tracking for solar energy systems[C]//39th International Universities Power Engineering Conference,2004:73-77.
(编辑胡小萍)
猜你喜欢
数学物理学报(2022年4期)2022-08-22 04:06:36
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
河北理科教学研究(2020年2期)2020-09-11 06:15:48
数学物理学报(2019年4期)2019-10-10 02:38:56
电子测试(2018年13期)2018-09-26 03:29:34
电源技术(2017年1期)2017-03-20 13:38:08
贵州师范学院学报(2016年3期)2016-12-01 03:53:52
电源技术(2015年11期)2015-08-22 08:50:38
电源技术(2015年12期)2015-08-21 08:58:40
河北科技大学学报(2015年5期)2015-03-11 16:16:37
