
无位置传感器BLDCM反电势信号相移补偿研究
2011-04-17 07:29:00史梅花吕昊暾张激扬
空间控制技术与应用 2011年3期
史梅花,吕昊暾,张激扬
(1.北京控制工程研究所,北京 100190;2.北京航空航天大学,北京 100191)
无刷直流电机近年来发展较快,它体积小,重量轻,结构简单,既具有普通直流电机的良好调速性能,又不存在机械换向装置,电磁噪声干扰小,可靠性高.传统的无刷直流电机由于位置传感器的存在不仅使电机结构复杂,降低了电机的可靠性,而且在特殊环境下位置传感器无法使用.而无位置传感器电机的优点有:
1)降低电机本体的复杂度,减少引线,简化电机的制造工艺;
2)在航天领域,可以减少控制力矩陀螺的导电环数量,提高整机可靠性;
3)不受恶劣的外部环境影响,使电机适用于恶劣的外部环境条件;
4)解决了由于位置传感器安装精度带来的换相误差问题;
5)降低电机制造成本;
6)节省电动机内部有限的空间,容易实现电机的小型化及轻型化,为电机系统在微小结构中应用创造条件.
基于以上特点,无位置传感器BLDCM可作为空间机械系统和控制系统的驱动装置,符合人造卫星、宇宙飞船、着陆器、行星等飞行器质量更轻、体积更小、调速性更好、可靠性更高的趋势,在航空航天领域有较大的应用空间.美国NASA G2高速储能飞轮中的永磁同步电机,使用了无位置传感器的磁场定向控制方法[5].俄罗斯的控制力矩陀螺高速组件也使用了无位置传感器控制技术.无位置传感器控制方法的应用将使控制力矩陀螺的驱动系统在复杂度、制造工艺、可靠性以及成本等方面得到很大改善,同时,可保证高速转子驱动线路的控制精度,具有较高的实用价值.
目前,反电势过零点检测法是无位置传感器无刷直流电机应用最广泛的转子位置检测方法,该方法需要对反电势信号进行滤波,而滤波电路使电机产生与速度有关的相移,实际应用中当调速范围很宽时为实现电机正确换向必须补偿滤波相移.文献[7]提出对电机实时软件补偿,但是该方法需要实时计算相角的延迟,算法复杂,难于实现.本文提出在电机的低速段和高速段采用不同滤波电路的方法,使反电势过零点信号在调速范围内正确控制电机换向.该方法已成功应用于工程实践.
1 反电势过零点检测法
反电势法无位置传感器无刷直流电机控制的关键在于反电势过零点检测,控制系统的性能主要取决于反电势过零点检测的准确性.
本文采用端电压法来检测反电势的过零点,对于三相星形连接的绕组来说,端电压是指绕组端部至电源负端之间的电压.其基本原理是,通过检测三相绕组端电压,并进行分压滤波,滤除开关噪声对低频反电势的影响.滤波后的信号与中性点电压比较后,所得差值的过零点即为反电势的过零点[1].延时30°电角度即为BLDCM的换向时刻.
电机运行按120°导通方式工作,图1所示为BLDCM的等效电路.除换向瞬间外,在任意时刻,电机总有一相绕组处于断开状态,只要检测到断开相绕组的反电势过零点,即可确定电机的转子位置.所以反电势过零法无位置传感器无刷直流电机控制方法的重点在于悬空相反电势的测量.
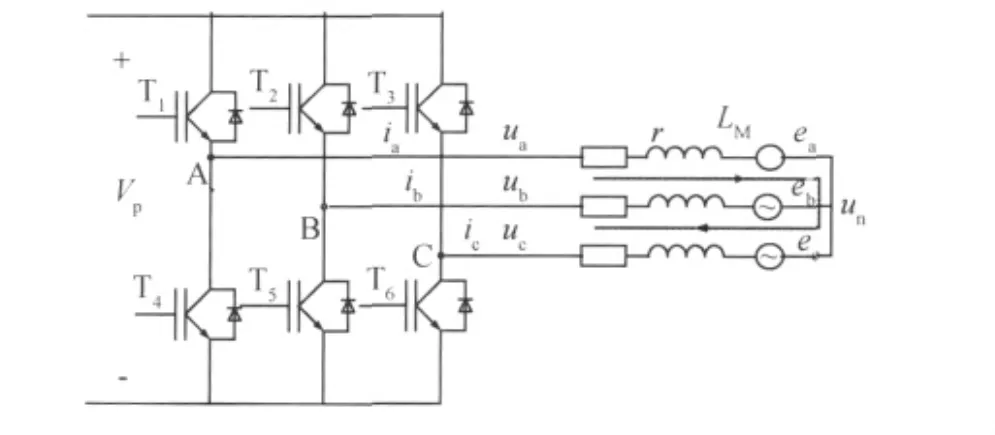
图1 无刷直流电机等效电路
根据图1可写出电机三相绕组输出端电压对直流电源地的电压方程组为:
式中ua、ub、uc分别为 A、B、C 三相绕组端电压,ea、eb、ec分别为三相绕组反电势,r为绕组电阻,LM为绕组等效电感,并假设三相的r、LM值均相等.un为三相绕组中性点N对电源负极的电压.
电机一个通电周期有六种工作状态,且每种状态呈现一定的对称性,因此只需对一个状态进行分析.假设电流方向如图1中虚线所示,则A、B两相电流大小相等,方向相反,C相电流为零.且在ec过零点处:

由式(1)和(2)可得中性点电压:

C相反电动势过零检测方程为:

同理可得A、B两相反电动势过零检测方程,则反电动势过零检测方程组为:
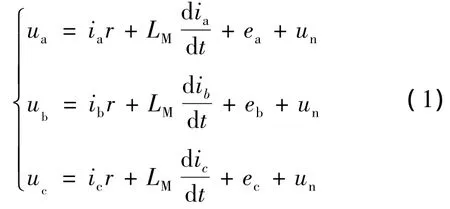
端电压ua、ub、uc分别经分压滤波后得到检测信号Ua、Ub、Uc,将它们分别与模拟中性点电压 UN比较,得到标准方波,该方波延时30°电角度后送DSP控制器作为BLDCM的换向信号.根据电路的对称性原理
图2 反电势过零点检测电路
2 反电势信号滤波电路设计
2.1 常规滤波电路设计
图2中设计的反电势检测电路是一种常规一阶RC低通滤波器(LPF)简图,这种电路结构简单,易于实现[3].由图知位置检测信号是经过阻容滤波后得到的,其过零点必然会产生相位偏移.假设相位延迟角为α,则其过零点也跟着滞后α[6].以A相为例,检测点电压Ua与绕组端电压ua之间的关系为:

其中,f为反电势频率,C1为滤波电容.
相位延迟角为:
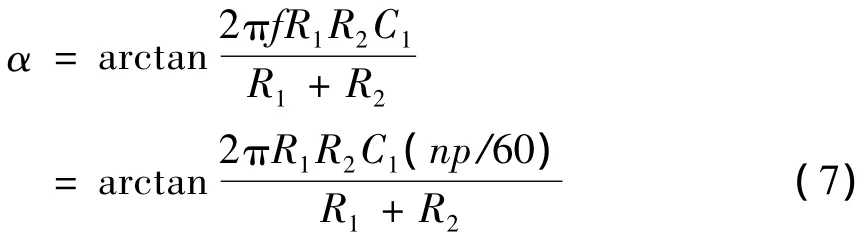
其中,n为电机转速,p为电机极对数.
由式(6)可知,相位延迟角同电机的转速成正比.电机的转速越快,相位延迟角就越大,在电机的调速过程中,相位延迟角的大小随着电机的转速变化.
当延迟角小于30°电角度时,此时检测到的反电势过零点由原来的实际过零点往后移位了α角.此时,电机换相点由原来延迟α变为延迟30°-α.
如图3所示,以B相为例,当速度不高时,由于相位滞后,反电动势过零点由m点移到n点,m、n之间出现一个相位差,就是滞后相位α.要使B相在点Q3处换相,当检测到反电动势过零点后延迟30°-α电角度再换相,即相位延迟角由30°电角度变为延迟30°-α电角度.
随着电机速度升高,反电势过零点信号滞后相位增大,如图3所示反电势的过零点从m点移到s点,此时,检测到的反电势过零点已超过了下次的换向点,无法通过延迟30°-α的方法对电机进行换向.为使电机在整个调速范围内正确换向,文献[7]通过延迟90°-α电角度对s点的下一个换向点k进行换向,即用B相的换向信号控制A相换向.但是该方法需要实时计算相角的延迟,算法复杂,难于实现.因此,使用单一滤波器难于实现在较大调速范围内的正确换向.
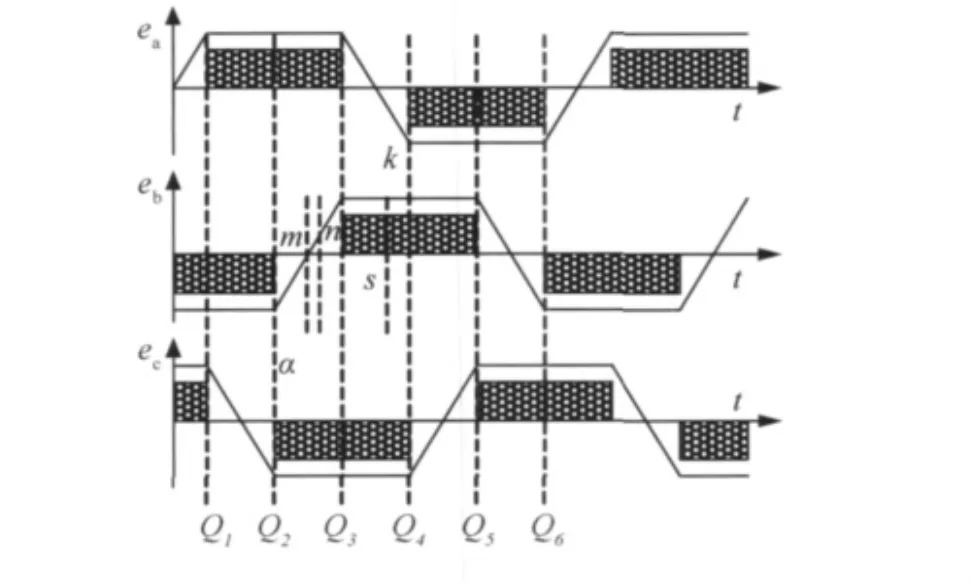
图3 电机延迟换向示意图
2.2 分段滤波电路设计
本文提出在电机的低速段和高速段采用不同滤波器的方法,实验结果表明,该方法可使反电势过零点信号在较大调速范围内正确控制电机换向.
低通滤波电路对端电压信号滤波来获得反电势过零点信号.低通滤波电路的作用包括两个方面[2]:首先,滤除或最大程度地削弱端电压信号中的PWM斩波脉冲信号,保证端电压信号经过低通滤波器后,其中的PWM斩波脉冲信号不会对反电势信号的后续处理产生影响.其次,提取出端电压信号中的反电势信号,并在电机运行的范围内,将经过滤波的反电势过零点信号的幅值控制在适当的范围内,以免损坏器件.由于反电势不是真正的正弦波形,经过低通滤波电路后,反电势波形会有一定程度的失真,在设计低通滤波电路时,要尽量减小这种影响.
滤波电路设计如图4所示,(a)为低速段滤波器,(b)为高速段滤波器.
由于一阶低通滤波电路的频率选择性较差,在通带内的幅频特性衰减较大,而低速时反电势信号幅值较小,干扰大,这就需要提高RC低通滤波器的阶数来改善低通滤波器的幅频特性.如图4所示,低速滤波电路比高速滤波电路增加一级一阶低通滤波环节对信号进行深度滤波.下面分别对高、低速滤波器特性进行分析.
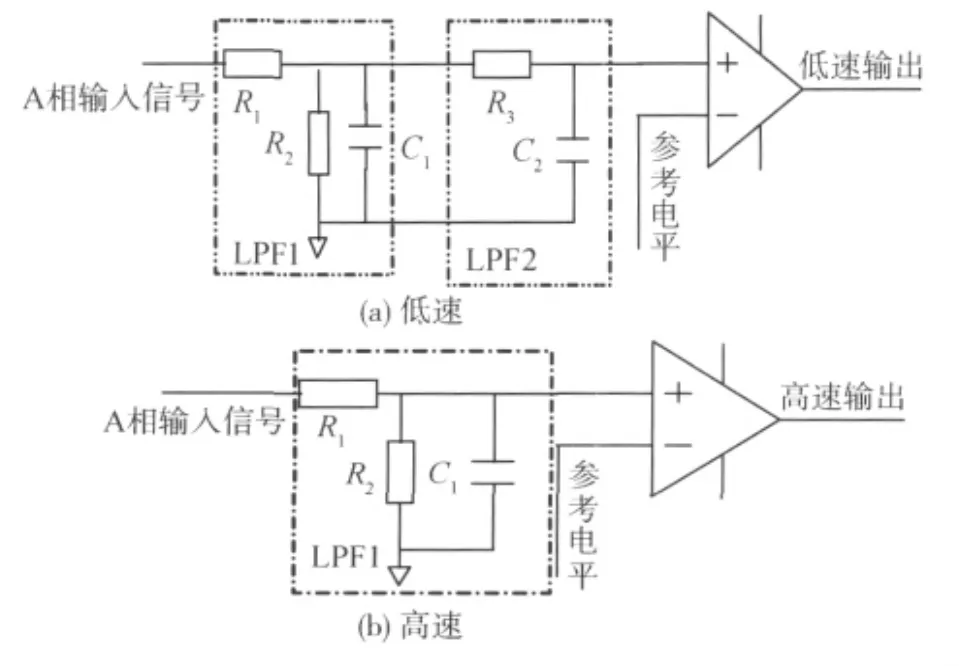
图4 低速、高速滤波电路简图
2.2.1 低速段滤波器特性分析
根据图4(a)低速滤波器幅频特性为:
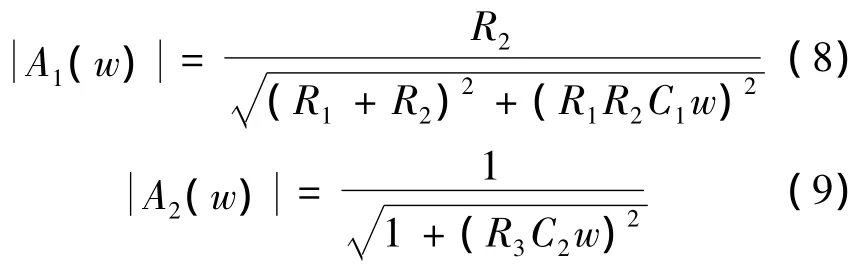
相频特性可表示为:
其中,w为电机角速度,且w=2πf.
由滤波器幅频特性和相频特性公式可以看出,随着通过滤波器的信号频率升高,信号的增益减小,而移相变大.根据低通滤波器的幅频特性有[8]:

满足式(12)的wb为带宽频率.根据设计的滤波器可知,在低速段存在wb1和wb2两个带宽频率,且wb2<wb1.LPF1是在整个频带范围内对反电势信号进行滤波,而LPF2只在w<wb2频带范围内对反电势信号进行滤波,保证低速时反电势信号正确控制电机换向.根据电路原理可得低速段总相位偏移为:

通过软件延时,选择适当的w值对滤波器引起的相位滞后进行补偿,在精度要求不高的工程应用场合,电机角速度w值可根据经验选择,亦可选择通带内的角速度均值,但要满足w<wb2.
2.2.2 高速段滤波器特性分析
随着电机转速升高,反电势信号幅值增大,当电机角速度大于LPF2的带宽频率,即w>wb2时,系统切换至高速滤波电路.此时高速段滤波器幅值特性为A1(w),引起的相位偏移补偿值为Φ1(w),同理,选择适当w值对相位滞后进行补偿,w可根据工程经验选取,一般选择高速段内的角速度均值且满足wb2<w<wb1.
反电势过零点信号滤波后与模拟中性点电压比较,如图4所示,图中参考电平即为模拟中性点电压.比较结果送控制器驱动电机运转.
电机在高速和低速段采用不同滤波电路的方法,可根据滤波电路图和滤波器特性计算出滤波电路滞后相位直接进行补偿,再延时30°电角度即可控制电机正确换向.算法简单,易于实现,非常适合工程应用.若对控制精度要求非常高,该方法亦可通过实时检测w值对电机进行实时补偿.
3 实验结果
本文搭建了以TMS320LF2407A为控制核心的实验平台,系统实验电机为三相八对极星型连接无刷直流电机,直流供电电压为45V,反电势系数为0.0393V/(rad/s),力矩系数为 0.0395Nm/A.速度控制器控制电机稳速在6000r/min.
试验中,采用三相对称星型电阻网络产生模拟中性点.无位置传感器BLDCM起动过程结束后,进入自同步运行阶段,系统采用速度、电流双闭环控制.
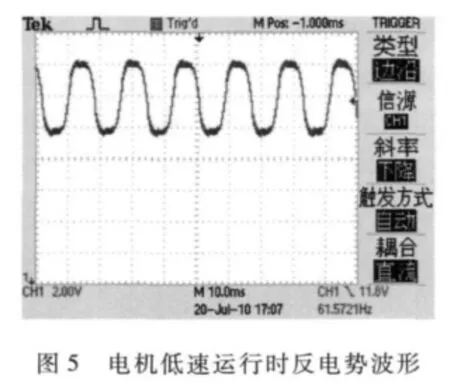
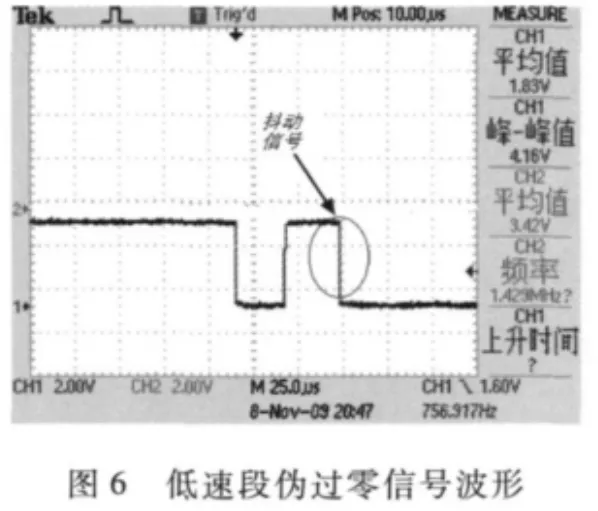
(1)实验一:电机低速运行
当电机速度低于600r/min时,采用低速滤波电路,同时软件通过定时器延时30°电角度,再加滤波器的补偿值0.8ms,输出波形如图5所示.若低速时采用高速滤波电路,反电势过零点发生抖动,出现伪过零信号,如图6所示,证明反电势过零信号中还存在干扰信号,高速滤波电路在低速段不适用.
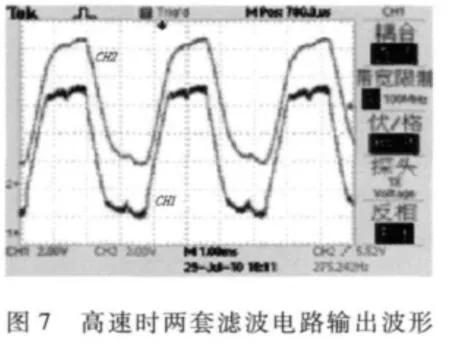
(2)实验二:电机高速运行
当电机速度高于2500r/min时,反电势过零点信号稳定,干扰相对较少.此时软件禁止DSP的低速滤波电路捕获单元,使能高速滤波电路捕获单元,系统切换至高速滤波电路.根据电路原理,低通滤器的最大滞后相位为90°,随着电机转速升高,由式(12)可知,低速滤波器的最大滞后相位为180°,滞后相位超过90°.电机低速滤波电路在高速段不适用.
实验结果如图7所示,CH1、CH2分别为电机高速运行时高、低速滤波电路输出波形,CH1比CH2过零点超前约 0.2ms,此时软件补偿(0.8 -0.2)ms.通过选择合适的滤波电路电阻电容值,可控制电机正确换向.
当电机转速在600r/min和2500r/min之间时属于过渡区,采用高低速滤波电路电路均可正常工作.为保证电机的运行平稳性,设定电机转速达到2000 r/min时切换至高速滤波电路.
4 结论
针对采用反电势过零点法的无位置传感器无刷直流电机,本文立足于在实际工程设计中遇到的问题,采用比较简洁有效的方法,实现无位置传感器无刷直流电机的大范围调速.电路结构简单,具有很强的实用性.理论推导和实验分析都证实了该方法的可行性和有效性.
该方法的不足之处是电机运行在低速段时,平滑性较差,但是不影响一般工程应用.为了进一步提高系统的性能及可靠性,下一步将研究改善低速段运行平滑性的方法.
[1] 王京锋,孙纯祥,林洪怡.高速无刷直流电机控制与无位置传感器测速研究[J].电力电子技术,2006,40(5):65-67
[2] 李强.无位置传感器无刷直流电动机运行理论和控制系统研究[D].东南大学博士学位论文,2005
[3] 张相军,陈伯时,朱平平,等.直流无刷电机无位置传感器控制中反电动势过零检测算法及其相位修正[J].电气自动化,2003,(3):16-19
[4] Kim T H,Lee B K,Ehsani M.Sensorless control of the BLDC motors from-near zero to high speed[J].IEEE Transactions on Power Electronics,2004,19(6):1635-1645
[5] Elizabeth A.Fehrmann automating the transition between sensorless motor control methods for the NASA Glenn research center flywheel energy storage system[C].The 2nd International Energy Conversion Engineering Conference,Providence,Rhode Island,16-19 August 2004
[6] 张扬,卢旺.反电动势法无刷直流电动机位置检测误差分析及补偿[J].自动化技术与应用,2009,28(5):72
[7] 张相军.无刷直流电机无位置传感器控制技术研究[D]上海大学博士学位论文,2000
[8] 童诗白,华成英.模拟电子技术基础[M].北京:高等教育出版社,2003
猜你喜欢
大电机技术(2022年5期)2022-11-17 08:12:56
防爆电机(2020年4期)2020-12-14 03:11:02
水电站机电技术(2017年9期)2017-09-26 03:34:52
电子制作(2017年1期)2017-05-17 03:54:12
微特电机(2016年3期)2016-11-29 09:43:45
科技创新导报(2015年32期)2015-04-12 09:22:46
淮南师范学院学报(2015年3期)2015-03-22 01:16:17
电机与控制应用(2015年1期)2015-03-01 03:49:10
江苏通信(2014年4期)2014-04-14 06:18:42
新高考·高一物理(2012年5期)2012-04-29 20:27:57
