
载人登月测控通信系统的现状与发展趋势
2011-03-21 15:46刘云阁
电讯技术 2011年7期
刘云阁
(中国西南电子技术研究所,成都 610036)
1 引 言
随着科技的进步以及空间竞争的需求,月球因其空间和资源优势将成为下一个全球竞争的热点[1]。
从1969年美国“阿波罗11号”成功实现首次载人登月,经过30多年的相对沉寂之后,国际社会又纷纷传出各种版本的新登月计划,新世纪掀起了一波竞相登月的新浪潮。
俄罗斯计划在2015年派载人飞船登陆月球[2];欧洲航天局(ESA)计划在2020年将宇航员送上月球;日本政府设定目标,在2020年之前将一名宇航员送上月球;印度也希望能在2020年前实现登月。
2004年1月,当时的美国布什总统宣布了雄心勃勃的探月新构想,其主要目标之一就是在2015~2020年实施载人登月。为了安全和增加运载能力,美国重返月球计划采用新的发射方式[3]。融入人货分运的思想,将载人探测飞行器“猎户座”与月球登陆器先分别发射至近地轨道,然后在太空将“猎户座”与月球登陆器和上一级奔月运载火箭飞离地球级通过交会对接后一同进入奔月轨道。因此,对探测飞行器“猎户座”与月球登陆器的高精度测量和控制技术将是决定交会能否实现的关键,其间大容量的数据传输是必不可少的。
2010年2月,美国总统奥巴马公布的预算提案已没有NASA重返月球计划所需经费。美国放弃NASA重返月球计划[4]的决定却为其它国家敞开了一道门,也使中国成为了这一轮登月竞赛中最有力的竞争者。
中国已启动以“绕”、“落”、“回”3个步骤的探月工程以及“登”、“驻”、“用”三步走战略的登月工程计划,预计2025~2030年间实现载人登月[5]。
登月工程的实施,需要有一套完善的测控与通信网络才能有效地保障各步骤的顺利开展。“阿波罗”任务主要由NASA载人航天测控网地基的USB测控站提供支持,NASA深空测控站作为备份。美国重返月球计划采用了新的发射方式,测控系统要适应交会对接、大容量数据传输、高测控覆盖率的要求,其规划也呈现出新的特点。国内也正在进行载人登月工程及其测控通信系统的论证。
2 美国载人登月测控通信系统的发展
2.1 “阿波罗”工程
“阿波罗”载人登月工程的测控与通信主要依赖于依靠NASA载人航天测控网(MSFN)S频段统一载波系统(USB)完成。该网由全球布局的测控站组成,支持近地段、地月转移入轨段、返回再入段的测控通信;NASA深空网提供应急测控通信支持。
“阿波罗”任务时期的USB测控系统由10个9 m USB站、3个26 m USB站、一个9 m USB活动站、5艘测量船和8架测控飞机组成。NASA深空网由3个26 m站和一个64 m深空站组成。其中9 m USB用于近地段的测控通信,26 m USB用于地月转移以及在月球附近的测控通信。后续任务则对整个网络的规模进行了缩减,主要是缩减了测量船和测控飞机的数量,保留了1艘测量船和4架测控飞机。
“阿波罗”载人登月工程利用地基测控系统实现对飞船的跟踪、测距、遥测、控制,并实现话音和视频信号的传输。充分利用了S频段在空间的低损耗,以适应地球轨道以及登月过程的测控与通信,但由于带宽的限制,其视频图像采取了慢扫方式(Slowscan Television)。
“阿波罗”任务的测控通信包括在飞行阶段的USB天地测控通信(包括语音、数据和电视)、月面着陆后着陆舱的USB对地测控通信、着陆舱与轨道舱的VHF语音和数据通信、轨道舱对地的USB测控通信、航天员与着陆舱之间的VHF语音和数据通信,以及航天员之间的VHF语音通信。
2.2 美国重返月球计划
21世纪载人登月任务与之前的“阿波罗”项目不一样,当年模糊的影像将会被彩色高清影像所替代,地月之间的通信会变得清楚和频繁,这对测控通信链路提出了更高的要求。
2006年5月12日,美国NASA空间通信体系结构工作组(SCAWG)提交了名为《2005~2030年NASA空间通信与导航体系结构建议》的研究报告,对近期以及未来空间探测任务的通信与导航系统体系结构进行了规划,其中也包含了对月球探测与登月任务的相关内容。
该工作组总结了NASA现有空间通信体系结构的不足,在NASA现有能力的基础上,考虑了从现有能力向未来体系结构过渡的成本以及可行性等因素,提出了新的体系结构[6],如图1所示。
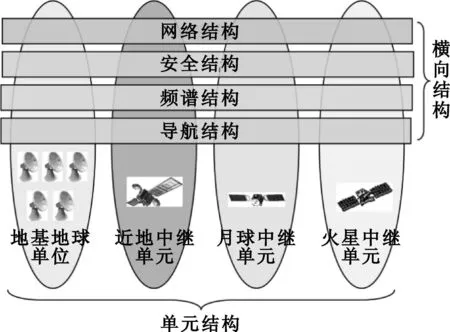
图1 NASA通信与导航体系结构Fig.1 Communication and navigation system configuration of NASA
这一新的空间通信与导航体系结构由地基地球单元、近地中继单元、月球中继单元、火星中继单元4个物理单元部分和相互交迭的网络、安全、射频频谱、导航结构组成。4个物理单元通过一体化的网络结构紧密连接在一起。其提出的一体化结构充分利用了目前地面所使用的TCP/IP网络技术,并将其扩展到了整个太阳系,使空间用户可以顺利地从一个单元无缝过渡到另一个单元。
在该体系结构中,分配给月球往返地球的链路工作于37~38GHz和 40~40.5GHz的频段,实现任务数据和操作数据的传输。当遇到雨衰时,额定的每秒数百兆比特的数传速率可以降低到1Mbit/s或更低进行传输,这样可以在37.75GHz频率上提供高达27dB的雨衰余量。同时,对地球站站址的选择需考虑相应的雨衰问题,以保证系统的可用性。
在NASA登月通信导航体系结构中,载人登月通信与导航系统主要包括月球月面用户到月球中继卫星(LRS)的Ka/S频段前、返向链路,月球中继卫星到地球的Ka频段前、返向主干线链路,Ka频段和S频段地基测控通信网以及月面终端(LCT)[7]组成的通信网络,如图4所示。
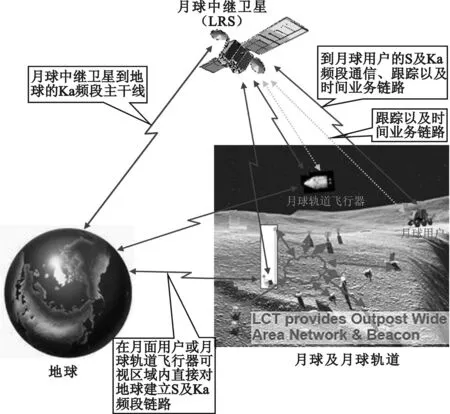
图2 NASA登月通信导航体系结构示意Fig.2 Communication and navigation system configuration of NASA for Human Lunar Mission
在登月器进入月球轨道以及在月球表面活动期间,在地基网可视范围内时,月球表面的用户以及轨道飞行器可通过S/Ka频段链路直接与地球建立测控与通信链路,也可通过月球中继卫星经地月主干网实现测控通信。LCT通信网络提供月球前哨基地广域网及信标。月球中继卫星[8]可实现月面用户或月球轨道飞行器到月球基地站的通信中继,也可实现与地球地基测控系统的中继转发,扩大地基地球单元对登月过程以及月面活动的测控通信覆盖率。
NASA登月通信导航体系结构中采取多链路途径与地球建立通信业务:初期目标是通过直接对地(DTE)链路和一颗月球中继卫星,远期目标是通过直接对地(DTE)链路和两颗月球中继卫星。对于月球表面的业务,前哨基地站的数据通过LCT传送到其它登月用户,或通过DTE或LRS传送到地球。
该体系结构提出的最大理念就是准备引入TCP/IP,使得测控通信网络支持分组交换,可以进行配置,以克服其目前太空网络(Space Network)只能使用比特服务(Bit Services)提供点对点通信的不足。在点对点通信中,每个通信路径比较固定,缺乏灵活性。分组交换支持的可配置性概念,使得通信变得非常灵活和容易实现容错保护。
在登月器发射阶段,在地球轨道以及奔月轨道中,主要由地球地基测控通信网和NASA天基网进行测控通信。NASA已为月球勘测轨道器(LRO)计划在白沙建设18 m口径天线的S/Ka频段的地基测控通信站(白沙站,WS1,具有18m天线)[9],完成对LRO任务的常规操作业务,采用26GHz的Ka频段实现100 Mbit/s的数据传输率。在LRO发射段和初始月球轨道机动段,除WS1以外,还将使用NASA天基网、深空网(DSN)和商业S频段地面站。一旦航天器安全抵达月球轨道,主要的测控支持由WS1及商业S频段站提供,DSN用于紧急需要情况下的支持。
3 我国载人登月测控通信系统的发展设想与建议
3.1 研究现状
国外载人登月任务的特点是登月方式相对比较简单,而对运载火箭的要求很高。美国“阿波罗”登月计划以及前苏联登月计划采用的方案分别是一次性将登月有效载荷送入奔月轨道和环月轨道,美国重返月球计划采用的是近地轨道交会对接一次的方式。
国外的这些载人登月方案对于我国目前的国力等条件似乎都不理想,中国的载人登月究竟采用什么方式需要有自己的创新。我国运载系统近期的研究结论是我国载人登月将采取多次发射地球轨道交会对接或月球轨道交会对接的方案[10]。不论采取何种方案,为了保障登月飞行器以及航天员的安全,都需要一套完整、可靠的测控通信系统及应用方案来保障工程的顺利实施。载人登月的测控与通信系统必须具有极高的测控与通信覆盖率,需要采取多种手段实现地球网对登月器的高覆盖率,包括地面站组网、地球天基组网以及建设月球中继卫星系统等措施。
针对我国航天测控通信系统的现状,“嫦娥一号”工程利用“USB+VLBI(甚长基线干涉测量技术)”联合测轨的方法来实现对飞行器的测控通信[11],并达到了要求的定轨精度。首先,是提高USB测控系统的能力,在USB测控系统中的两个站新建了大天线,改善了以往用于地球卫星天线的信道余量,提高了测量精度,增强了系统可靠性,使地面站作用距离从地球范围延伸到月球范围。其次,是在航天测控领域引入了天文测量技术,将间隔数百乃至数千公里的口径较小的射电望远镜合成为巨大的综合口径望远镜,称为甚长基线干涉测量技术(VL-BI),提高了分辨率[12]。在“嫦娥二号”工程中增加了X频段的测控站,进一步提高了深空测控能力。
对于载人登月阶段大容量的数据传输、更高轨道覆盖率以及更高精度定位需求,仅仅依靠改造的USB系统以及相应的VLBI技术,再加上X频段的深空测控已无法完全满足,必须建立具有宽带传输能力、具有更高精度的、覆盖整个地球到月球轨道的宽带测控通信链路。
3.2 发展路线设想
与我国“登”、“驻”、“用”三步走的载人登月计划相对应,我国载人登月测控通信系统可以采取三步走的技术途径,满足各个阶段的需求:
第一步,目前有效的解决方案是建设用于载人航天和登月工程、兼容USB系统以及地基地球中继体制的S/Ka频段地面测控网,增加大口径天线、相控阵天线及天线组阵系统,与已有的USB、UCB、深空站、天基系统形成天地基一体化的地球地基测控通信网,保障与登月器、月球轨道飞行器以及月面用户连续不间断的测控与通信;
第二步,建设月球轨道中继卫星,在此基础上可建立地球到月球中继卫星的Ka频段为主、激光链路为辅的宽带主干线,保障登月器进入月球轨道之后以及用户在月面活动期间地球站对其的测控与通信覆盖率,逐步实现Ka频段链路和激光链路并存,在应用上相互补充、相互支撑的两条月地互联宽带主干线;
第三步,进一步建设、完善月球网,主要包括月球导航与中继通信卫星星座、月球表面无线通信网络和月球基地导航着陆系统等,月球表面无线通信网络系统中的月球通信终端站实现月面用户的无线网络接入,并与月球中继卫星以及地球网建立S/Ka频段的测控与通信链路。
3.3 体系结构建议
为了达到以上各阶段的目标,应在补充完善地球网陆海基USB、UCB(C频段统一载波系统)以及天基测控通信网的同时,尽快实现S/Ka频段宽带测控通信系统(包括大口径抛物面天线系统以及相控阵天线系统)的建设,利用Ka频段带宽宽、可支持高速数传的特点[13],为月地主干线以及月球用户的直接对地的测控、通信以及导航奠定技术基础,逐步地进行各环节的建设,最后形成完整的、支持载人登月各阶段任务的测控、通信与导航体系。完整的体系结构示意如图5所示。
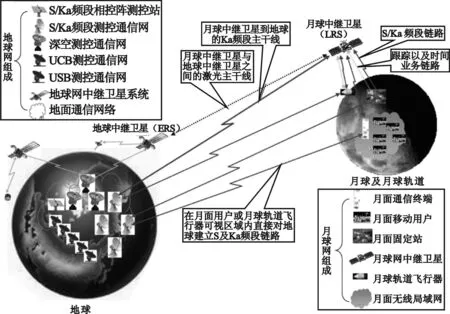
图3 我国载人登月测控通信系统体系结构建议Fig.3 Suggestion of Communication and navigation system configuration for China′s Human Lunar Project
S/Ka频段大口径抛物面测控通信系统适用于地球站对月球轨道航天器及月面用户建立宽带测控通信主干链路,X频段深空站及天基系统作为提高主干链路测控通信覆盖率的补充;S/Ka频段相控阵测控通信系统与USB、UCB等共同构建陆海基测控通信网,适用于登月飞行器在地球轨道以及地月转移轨道等对地球站具有高动态特性飞行阶段的高覆盖、实时测控通信链路的建立。抛物面和相控阵的S/Ka频段测控通信系统在体制与信号形式上完全兼容,只是根据登月飞行器的不同应用阶段实现大动态与低动态、宽带应用与窄带实时控制的相互补充,可靠地构成覆盖整个登月过程的测控通信宽带链路。
载人登月工程测控通信系统体系的建立,需要在系统体制、新技术应用等多方面得到发展、创新和应用,必将大大提高我国飞行器测控通信领域的技术水平,拓展系统应用能力和空间覆盖范围,从而推动我国航天事业对近地空间以及外层空间探测的进一步发展。
4 结束语
本文对载人登月工程的国内外发展状态进行了简述,分析了国外月球探测及载人登月通信导航体系结构发展现状与趋势,提出了适应载人登月工程测控通信系统的发展建议和初步思路,而要实现这些目标,还需要针对具体的技术途径与方法开展一系列新技术及关键技术的研究与突破,结合我国近地轨道载人航天、月球探测工程,进行相关的验证试验。
[1] 韩鸿硕,蒋宇平.各国登月计划及载人登月的目的与可行性简析(上)[J].中国航天,2008(9):30-33.HAN Hong-shuo,JIANG Yu-ping.Human lunar scheme,aim and feasibility of various country(PartⅠ)[J].Aerospace China,2008(9):30-33.(in Chinese)
[2] 吴小宁,刘斌.俄罗斯2006~2030年载人航天发展规划[J].导弹与航天运载技术,2007(2):18-23.WU Xiao-ning,LIU Bin.Russian Manned Space Development Program for the Period of 2006~2030[J].Missile and Space Vehicle,2007(2):18-23.(in Chinese)
[3] 龙乐豪.我国载人登月技术途径探讨[J].前沿科学,2008,2(4):29-37.LONG Le-hao.Discuss on technique approach for human lunar project of our country[J].Frontier Science,2008,2(4):29-37.(in Chinese)
[4] 奥巴马砍掉重返月球计划[J].中国航天,2010(3):32-35.Obama cut scheme of return lunar[J].Aerospace China,2010(3):32-35.(in Chinese)
[5] 陈斌.中国最早2025年载人登月[J].前沿科学,2009,3(2):96.CHEN Bin.China will start human lunar project no early than 2025[J].Frontier Science,2009,3(2):96.(in Chinese)
[6] 2005~2030年NASA空间通信与导航体系结构建议(最终报告)[R].张纪生,等,译.北京:跟踪与通信技术研究所,2007.NASA′s communication and navigation system architecture in years from 2005 to 2030(Final Report)[R].Translated by ZHANG Ji-sheng,et al.Beijing:Institute of Tracking and Communication Techniques,2007.(in Chinese)
[7] James Schier.NASA′s Lunar Space Communication and Navigation Architecture[C]//Proceedings of the 26th International Communications Satellite Systems Conference.San Diego,CA:AIAA,2008:54-76.
[8] Kul B Bhasin1,Anthony W Hackenberg,Richard A Slywcza k.Lunar Relay Satellite Network for Space Exploration:Architecture,Technologies and Challenges[C]//Proceedings of the 24th AIAA International Communications Satellite Systems Conference.San Diego,California:AIAA,2006:53-63.
[9] Stephen F Currier,Roger N Clason.NASA Ground Network Support of the Lunar Reconnaissance Orbiter[C]//Proceedings of the 9th International Conference on Space Operations.Rome,Italy:AIAA,2006:1-5.
[10] 龙乐豪.关于中国载人登月工程若干问题的思考[J].导弹与航天运载技术,2010(6):1-5.LONG Le-hao.On Issues of China Manned Lunar Exploration[J].Missile and Space Vehicle,2010(6):1-5.(in Chinese)
[11] 于莘明,李华泽.“嫦娥”是怎样被测控的[J].科技长廊,2007(23):30-32.YU Zi-ming,LI Hua-ze.How Chang-E is TT&C[J].Modern Science,2007(23):30-32.(in Chinese)
[12] 王宏,董光亮,胡小工,等.USB-VLBI综合确定SMART-1环月探测器轨道[J].测绘科学,2008,33(1):40-42,67.WANG Hong,DONG Guang-liang,HU Xiao-gong,et al.Joint Orbit Determination for SMART-1 with USB-VLBI[J].Science of Surveying and Mapping,2008,33(1):40-42,67.(in Chinese)
[13] 刘嘉兴.再论发展Ka频段测控通信网的思考[J].电讯技术,2008,48(12):90-97.LIU Jia-xing.Rediscussion on the Consideration of Developing Ka TT&C Communication Network[J].Telecommunication Engineering,2008,48(12):90-97.(in Chinese)
猜你喜欢
军事文摘(2022年14期)2022-08-26
智慧少年·故事叮当(2021年3期)2021-06-29
军事文摘(2019年18期)2019-09-25
科学与财富(2019年3期)2019-02-28
测控技术(2018年2期)2018-12-09
山东工业技术(2016年15期)2016-12-01
系统工程与电子技术(2016年4期)2016-08-24
太空探索(2016年12期)2016-07-18
现代防御技术(2016年1期)2016-06-01
海军航空大学学报(2015年1期)2015-11-11
