
多波束测深系统在葛洲坝导沙底坎清淤中的应用
2011-03-13 07:59张壮志刘畅快
大坝与安全 2011年6期
张壮志,刘畅快
(1.中国长江三峡集团公司,湖北宜昌443002;2.中国长江电力股份有限公司,湖北宜昌443002)
1 多波速测深系统介绍
多波束测深系统也称声纳阵列测深系统,利用超声波原理进行工作。系统由GPS导航定位系统、多波束换能器(探头)、光纤罗经、声速剖面仪、水深数据采集处理器、数据处理计算机和处理软件构成(见图1)。多波束测深系统信号接收部分由n个成一定角度分布的相互独立的换能器完成,每次能采集到n个水深点信息,可对测区进行全范围无遗漏扫测。目前,该系统波束数已达100多个,波束宽度仅有1°~2°,总扫描宽度为150°~180°,多波束按带状方式进行,水下覆盖为一个面(见图2),所覆盖的宽度是水深的4~10倍[1],极大地提高了测量的效率,可完全实现测深数据自动化及在外业准实时自动绘制出测区水下彩色等深图。利用多波束声信号进行测扫成像,提供直观的测时水下地貌特征,被形象地称为“水下CT”。
2 多波速测深系统应用实例
2.1 项目背景
葛洲坝水电站是一座低水头径流电站。经多年运行,葛洲坝大江电站上游导沙坎前已淤积了大量泥沙,不能发挥原有的拦沙作用。大量乱石挟泥沙冲至大江电站排沙底孔进水口区域,已对该区域底坎钢板及底板混凝土造成不同程度破坏,需对大江电站上游导沙坎前区域实施清淤项目。

图1 多波束测深系统主要组成部分Fig.1 Main components of the multi-beam echo sounding system

图2 多波束水下覆盖图Fig.2 Underwater coverage of the multi-beam echo sounding system
为全面反映清淤前后水下地形的变化情况及对清淤工作量进行精确计算和统计,选用多波束测深系统来完成电站上游导沙坎前区域清淤前后的水下地形测量。
2.2 测量范围
该项目横向测量范围为大江防淤堤至三江防淤堤之间水域,纵向测量范围为从大江防淤堤堤头至葛洲坝水利枢纽上游坝体。整个测区范围(如图3)沿坝轴线方向约1.4 km,垂直坝轴方向约1 km,测量面积约1.4 km2。

图3 葛洲坝大江电站上游导沙坎前清淤区域图Fig.3 Sketch of sediment elimination at Dajiang hydropower station
2.3 技术措施
2.3.1 技术准备
(1)仪器设备的选用
该系统导航定位采用Trimble5700型GPS,利用其实时载波相位差分技术进行GPS导航定位。导航软件采用HypackMAX综合水文测量软件。水下地形施测前应选取岸上至少一个五等平面控制点对DGPS定位精度进行检验,达到精度要求方可用于水下定位测量,DGPS参考站架设引据控制点一般不应低于五等平面精度。
该系统主要仪器设备见表1。
(2)多波速系统的校正
系统校正操作应在水下扫测之前或扫测结束后立即开展,以保证系统校正与扫测时多波束系统各仪器状态一致。多波束系统校正计算应在校正操作现场完成并做好校正参数记录,多波束系统校正方法及要求见表2。
(3)声波剖面测量
声速剖面测量采用SV Plus3643型声速剖面仪,量测扫测区域水表面至河床底(最大水深)的温度和声速剖面。

表1 多波速测深系统主要设备配置Table 1:Main equipments of the multi-beam echo sounding system
(4)测线布设
主测线宜平行于等深线总方向或岸线,检查线应垂直于主测线方向且均匀布设,在重要航行地区,测线间距取有效扫宽的1/2,一般采用全覆盖测量,测线间距不大于有效扫宽的4/5。
在保证全覆盖的前提下,测线部分地段超宽长度小于测线长度1/5的不需要补线。垂直于主测线方向均匀布设3条或3条以上检查线,进行多波束测深检查。
(5)测深准备
探测距离(量程)足够大,保证在测区最深区域仍可实现最大扫宽,又不宜太大以便获得比例适当的屏幕监测效果。
发射功率应足够高,保证在全测区(或分区施测的某一区域整体)内都有足够强的回波信号;发射功率又不宜太大,以抑制二次回波、击穿海底等不良现象发生。
接收增益宜取较低水平,以避免超饱和现象,并适当抑制噪声,接收增益又不可太小,否则会丢失信号。

表2 多波束系统校正方法及要求Table 2:Correction method and requirement for the multi-beam echo sounding system
2.3.2 外业水下地形数据采集
测深过程中实时监测动态传感器、电罗经、定位及测深设备的运行状态。姿态传感器或测深设备发生故障必须立即停止作业;罗经持续10 s故障应立即停止作业,定位数据持续20 s不正常停止作业,并合理补线。
线测量时,使用小舵角修正航向,尽量避免急转弯。
测量结束后,应再次核对多波束测深系统的关键参数设置,及时将外业原始数据转换至内业数据处理软件包能使用的数据格式,交付内业数据处理用。
测量结束后,现场核对,应排除一切不确定因素,记簿人签字后方可交内业使用。
2.3.3 测量数据处理
数据转换前应正确选取测船配置文件、滤波参数,在确保数据完整的前提下剔出导航、水深等数据的粗差,使数据处理时的显示效果更合理。数据处理前应进行声速剖面改正。
对采集数据进行数据转换与检验、声速改正、水深数据清理、数据抽稀、合理构造DTM模型,最后按工程测量要求输出高密度水下地形点位成果并绘制测区水下地形图,分色绘制测区三维电子图。
水下点位成果输出时除需输出一定比例尺成图点距成果外,还需输出1 m测点间距水下点位成果(在与坝体及岸边相接位置5 m范围内,测点间距加密至0.5 m)供清淤工程量计算使用。图4为经多波速系统校正的横偏图及艏偏图。
2.4 检查成果
多波速测深系统在清淤前后各完成一次水下地形的量测,图5客观地反映了2号剖面和52号剖面清淤前后横断面的变化情况。图6为多波束扫测数据生成的导沙坎前区域清淤后立体形态(疏浚区),通过与图7(地形数据生成的导沙坎前区域清淤后立体形态图)对比,量测成果一致。
2.5 多波速测深系统检验
评估多波束测深精度的一种有效方法是采用与主测线相交的检查测线,用这种方法可以评估多波束本身以及各传感器安装、校准、水位改正、声速改正等对测量结果的综合影响。外业实施时,本次施工采用了多波束与单波束同步进行水下地形测量方式以验收多波束测深成果质量(见图8、图9),水深测量验测精度统计见表2,满足规范及设计要求。

图4 多波束校正Fig.4 Correction for the multi-beam echo sounding system

图5 不同位置清淤前后横断面变化图Fig.5 Topography conditions before and after sediment elimi⁃nation
2.6 清淤量计算
根据多波速测深系统提供的清淤前、后导沙坎前区域的三维电子图,结合断面变化图,依据相关规范[2,3],本次清淤量计算分别按照开挖总方量、控制范围内的约定有效开挖方量、控制范围外扩1 m、2 m、3 m、4 m的开挖方量等6项不同要求进行,通过比对及加权处理得出最终清淤方量。
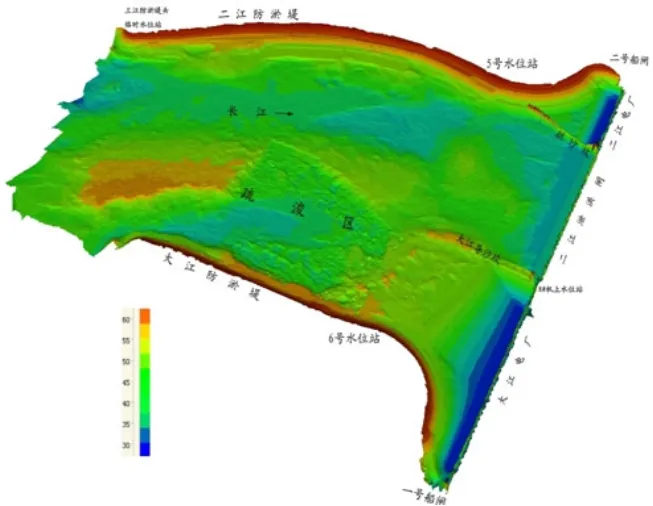
图6 采用多波束扫测数据生成的导沙坎前区域清淤后立体形态(疏浚区)Fig.6 Three-dimensional topography after sediment elimination measured by the multi-beam echo sounding system

图7 采用地形数据生成的导沙坎前区域清淤后立体形态(ABCDE为清淤区域)Fig.7 Three-dimensional topography after sediment elimination established with topographic data(ABCDE was the area of sedi⁃ment elimination)
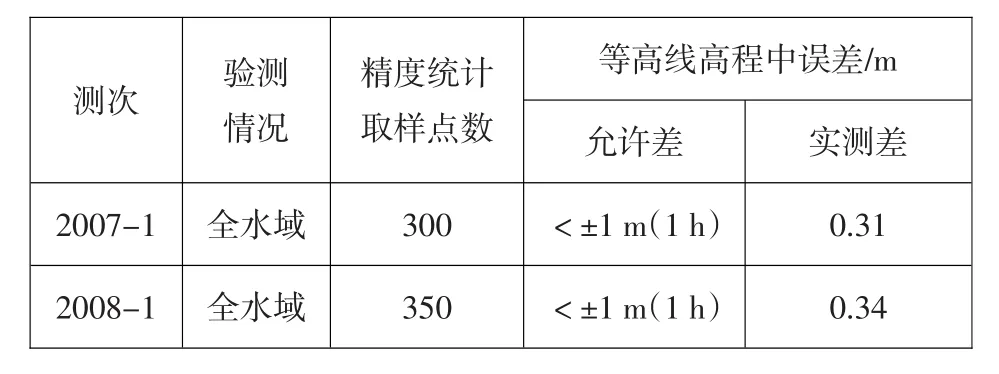
表3 各测次水下地形验测精度统计表Table 3:Statistics of precisions of the topography measurement tests
3 结语[4]
多波速水下测深系统在此次葛洲坝导沙坎清淤项目中科学、真实地反映了测区河床的实际情况,为该项目的顺利实施及工程量确认提供了可靠的依据。比较清淤前后所测水下地形图,横断面变化比较明显,清淤区域ABCDE范围内设计清淤高程为40 m,清淤后区域内的河床平均高程为40.57 m,其中ABCD靠上游侧的(零星小区域高程高于40 m)大部区域高程低于40 m,清淤效果较为理想。

图8 清淤前多波束、单波束检验统计示意图Fig.8 Comparison between measurement results of multi-beam system and single-beam system before sediment elimination

图9 清淤后多波束、单波束检验统计示意图Fig.9 Comparison between measurement results of multi-beam system and single-beam system after sediment elimination
在该项目实施一年后,葛洲坝大江电站排沙底孔进水口区域的水下摄像检查显示,大江电站导沙坎上游区域清淤后,排沙底孔进水口区域未出现乱石及泥沙,也没有产生新的破坏区域,导沙坎重新发挥了其拦沙护坝的作用。■
[1]高莹.多波速在扫海测量中的分析[J].交通科技,2009(1),101-102.
[2]JTJ919-99,疏浚工程技术规范[S].北京:人民交通出版社,2001.
[3]JTJ/T321-96,疏浚工程土石方计量标准[S].北京:人民交通出版社,1997.
[4]长江三峡水文水资源勘测局.葛洲坝大江电站上游导沙坎前水域清淤报告[R].2008.
猜你喜欢
建材发展导向(2021年19期)2021-12-06
铁道建筑技术(2021年4期)2021-07-21
湘潮(上半月)(2021年3期)2021-07-20
音乐教育与创作(2020年2期)2020-06-19
意林·全彩Color(2018年12期)2019-01-02
小学阅读指南·低年级版(2016年10期)2016-09-10
地震地质(2015年3期)2015-12-25
制造业自动化(2014年21期)2014-12-18
筑路机械与施工机械化(2014年2期)2014-03-01
河北工程大学学报(自然科学版)(2014年3期)2014-02-27

- 大坝与安全的其它文章
- 朝阳沟水库塑性混凝土防渗墙设计