永磁同步电机参数离线辨识方法的研究
2011-02-27 13:29:10刘桂花
电源学报 2011年1期
柳 晶,刘桂花,王 卫
(哈尔滨工业大学电气工程系,哈尔滨150001)
引言
永磁同步电机(PMSM)凭借其高功率密度和快速动态响应能力,而广泛应用于数控机床的进给、卫星的天线伺服系统等要求高性能的场合[1]。在永磁同步驱动系统中,无速度传感器控制、弱磁控制和损耗控制等控制策略的控制性能都严重依赖于电机参数的准确性。因而如何准确地获得同步电机的电气参数成为改善矢量控制系统性能的重要问题。
通常人们可以通过空载和堵转实验获取电动机的参数[1,3],但这种方法一般由人工完成,且测试误差比较大。近几年,电机控制领域的学者们提出了各种电动机离线和在线参数辨识方案[2]。既可以基于电机的稳态数学模型,通过在电机端施加特定的电压或者电流信号,测量它们的稳态或动态响应,辨识出电机参数[3-5];也可以基于电动机的动态数学型,采用线性最小二乘法估计电机的参数[6]。本文提出一种无需其他附加电路的离线参数自检测辨识方案,同时考虑实际系统对辨识精度的影响,通过进行合理补偿,提高了辨识精度。最后对一台2.5 kW永磁同步电动机控制系统进行仿真分析和实验研究,辨识出电机的定子电阻、反电势系数和交直轴电感,仿真和实验结果验证了本方案的有效性。
1 永磁同步电机(PMSM)数学模型
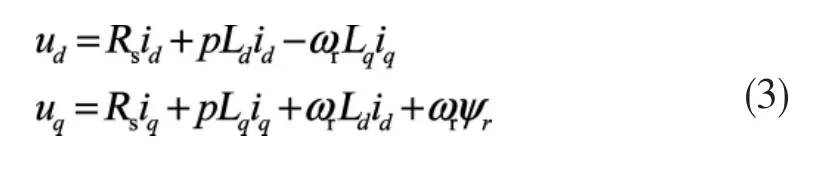
在同步旋转参考坐标系下PMSM的稳态数学模型如下:

式中:udq,idq和ψdq分别是d-q坐标下的定子电压、电流和磁链;Rs是定子电阻;ωr是电角速度。磁链方程为:
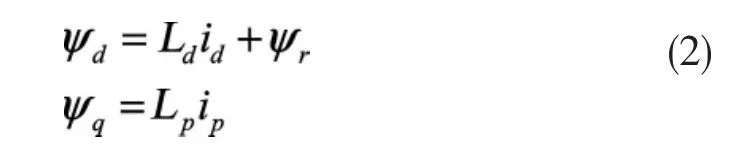
式中:Ld为直轴电感;Lq为交轴电感;ψr为永磁体磁链。 由式(1)、(2)可得:
2 参数辨识方案仿真分析
图1 为永磁同步电机三相逆变原理图。
把上桥臂功率开关器件导通时定义为 “1”,状态关断时定义为状态“0”。根据三组上桥臂的通断,有8个可能的开关状态,产生六个有效向量U1(001),U2(010),U3(011),U4(100),U5(101),U6(110)和两个零矢量U0(000),U7(111)。零电压矢量表示电机三相同时接到电源的正极或负极,电机的端电压实际为零。如图2所示,六个基本矢量将α-β平面分为6个扇区。

图1 PMSM电机三相逆变原理图
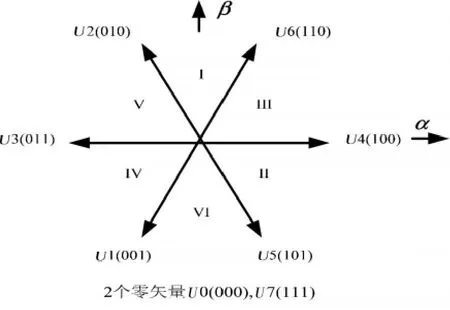
图2 电压空间矢量及扇区分布
下面详细介绍电机参数辨识的具体方法。
2.1 定子相电阻Rs的辨识
对定子Rs的检测方法采用直流伏安法,具体为通过逆变器将直流母线电压进行高频斩波,保持占空比恒定,得到等效的直流低压。向电机通入一个特定的空间电压矢量Ui(例如U1)和零矢量,同时记录定子相电流。实验的等效电路图如图3所示,UVW为定子三相绕组。Vd为经过斩波后的等效低压直流电压。

图3 电路等效模型
基于同步旋转坐标系的永磁同步电机稳态电压方程如上面所述式(1)所示。这里,Vd为直流母线电压经过逆变器高频斩波后的等效低压直流电压。Id为母线电流采样结果。当通入直流时,电机状态稳定以后,电机转子定位,记录此时的稳态相电流。因此,定子电阻值的计算公式为:

运用该方法进行定子电阻辨识,搭建基于Matlab/Simulink的仿真模型,仿真中使用的PMSM电机具体按参数如表1设置,逆变器开关频率为5 k。
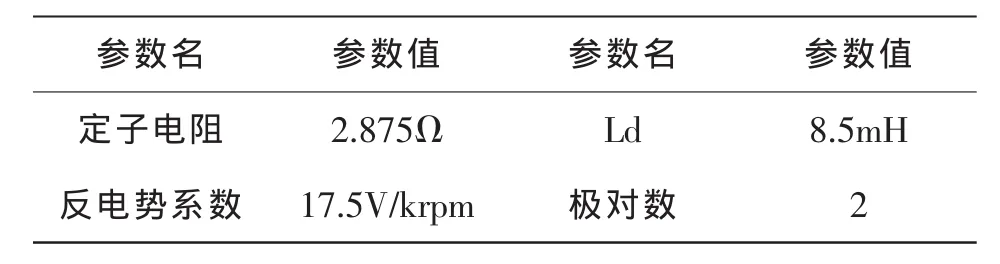
表1 Matlab仿真中永磁同步电机具体参数
在仿真中,通过设定SVPWM模块,得到目标电压矢量的驱动信号。并且通过SVPWM模块的设定,也可以得到占空比,所以每相的等效直流电压可以通过计算得出。然后需要对电流进行采样。这里将采样点选在直流母线上,当然也可以对三相中的某相进行电流检测。图4是电阻辨识的仿真结果。
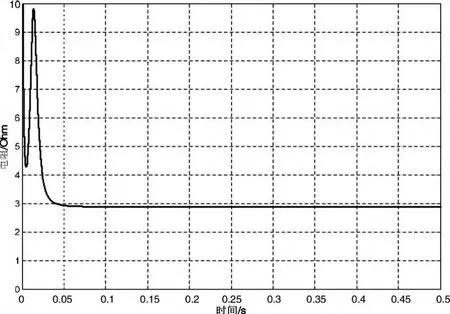
图4 电阻辨识结果
辨识结果为2.93 Ohm,与真实值有1.9%的误差。原因是在直流母线上引入了采样电阻,所以直流母线电流就会比没有采样电阻时偏小,导致辨识误差。
2.2 反电势系数Ke的辨识
对于反电势系数Ke的测量,在一般的辨识方法中,采用空载法,即用拖动电机带动被测电机以一定的转速旋转,同时保持被测电机负载开路,测试此时的电机空载相电压,即为反电势电压。结合转速,反电势可以计算得出相应的反电势系数。公式如下:

式中:E为反电势,n为转速。
但是这种方法需要将被测电机运行至发电状态,并且需要负载开路手动测试反电势,不能完成自动辨识。
在本文中提出一种新的识别电机反电势系数的方法。PMSM的控制技术采用基于无传感器的双闭环空间矢量控制技术。外环为速度环,内环为电流环。外环的速度误差经PI控制器得到交轴电流Iq的给定量。此给定量与实际的Iq比较经过电流PI调节器得到交轴电压给定量。同时在直轴电流控制上采用Id=0的控制策略,经过与实际d轴电流比较后,同样经过PI控制器得到直轴电压的给定值。当电机运行于一定转速n时,瞬时切断Id,Iq电流给定,即通过某种方法强迫电流给定信号为零,输出力矩也为零,电机将减速停转。由于电机的机械时间常数大于电气时间常数,这时电流PI的输出瞬时电压大小等同于电机反电势。测试此时的给定电压,则可以根据电压与转速关系式得出反电势系数Ke。运用该原理进行反电势系数辨识的仿真模型,仿真结果如图5所示。

图5 反电势系数辨识结果
从仿真结果中可以看出,通过这种辨识方法可以将Ke参数进行很好的识别。
2.3 交直轴电感的辨识
在辨识直轴电感参数Ld时,主要利用如下原理:向电机施加矢量方向固定的电压,对电机直轴进行定位,直轴电流将随之变化。在定位结束时,永磁体的直轴与施加的定子电压矢量方向一致,且静止不动。所以电机直轴方程根据式(3)简化为:

对于d轴电压步阶输入时的电流响应为:
其中U/Rs为稳态时的电流反应,Rs为电机电阻。由上式可知电流上升至稳态值的0.632倍时,-Rs/Ld·t=-1,电感与电阻的关系式可以写成:

其中t0.632为电流上升至稳态值0.632倍时所需的时间。根据以上原理搭建基于Matlab的PMSM电机的Ld参数辨识仿真模块。直轴辨识结果如下,可以看出在0.002 s之后,直轴电感参数稳定下来,误差较小。

图6 电感辨识仿真结果
以上是直轴电感参数的识别方法,对于交轴电感参数的识别,同样采用轴定位的方法。不同的是这次需要对电机进行交轴定位,再根据测得的电压电流进行分析计算,得出结论。
3 实验结果
将所介绍的辨识方案应用于2.5 kW的PMSM矢量控制系统中。采用IRCMF312芯片来实现。系统时钟设为50 MHz,PWM调制频率为5 kHz。
在上面介绍的电阻辨识中,采用直流伏安法,需要检测电机的等效低压直流电压与相电流。这里的关键是如何得到准确的低压直流电压值。众所周知,经过逆变器的斩波作用,得到的是一个平均值很低、周期固定且占空比固定的高频直流脉冲序列。然而由于IGBT的开通和关断均有一定的延迟,以及死区效应的影响,电机实际得到的脉宽减小。同时IGBT的导通压降和续流二极管的导通压降也会直接影响辨识精度。由于本方案采用的伏安法中,各开关器件的导通关断状态是确定的,因此,对于由以上原因产生的电压误差进行补偿时不需要复杂的补偿算法,只需将开关导通和延迟产生的误差计算后直接与测得电压相减就可以。图7是电阻辨识的波形,横坐标为采样点,我们这里设定为每10个PWM周期进行一次数据采样,下同。纵坐标的比例为每格0.655 mΩ,电机的真实电阻值为0.51 Ω,由于本方案中是通过对电机的等效直流电压及直轴电流进行采样计算,从而得出辨识结果,因此在辨识中不可避免的会受到开关动作等高频信号的影响,因此辨识结果上会有一定的高频波动。因此我们选择平均值作为辨识结果,由图7可得辨识结果为0.521 Ω。

图7 电阻辨识结果与准确值对比图
图8 中CH1为反电势系数的辨识波形,波形峰值对应每一周期的辨识结果,其坐标比例为每格0.67 mV/Krpm,由图得出反电势系数的辨识结果为19.61 V/Krpm。CH2为U相电压波形,单位为每格0.02 V。
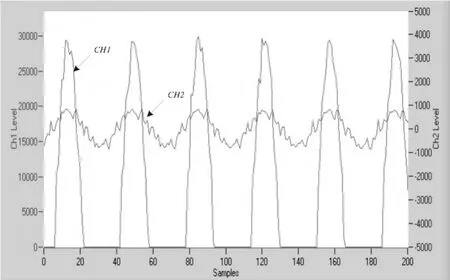
图8 反电势系数波形及相电压波形
图9 为直轴电感的真实值与辨识值的对比波形,纵坐标的比例为每格7.35 μH,电机的真实电感值为5.6 mH,辨识结果同样选择高频波动结果中的平均值,为5.76 mH。可以看出辨识开始后,经过较短时间辨识值就可以很好的逼近真实值。

图9 电感辨识结果与准确值对比图
表2 为实验采用的2.5 kw电机实际参数与辨识参数值的对照,可以看出辨识结果比较理想。
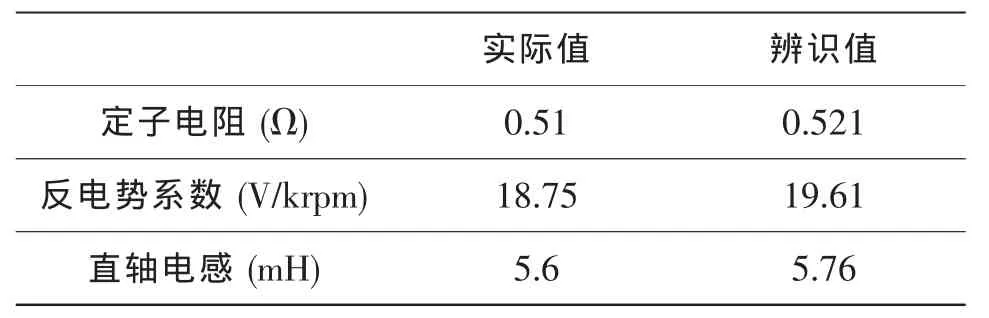
表2 电机参数辨识结果
4 结论
本文介绍了一种针对永磁同步电机电气参数的离线自动辨识方案,仅通过检测电机的电压、电流及转速,准确地辨识出的电机参数,并且本方案不需附加其他电路,具有方法简单的优点。通过对一套2.5 kW同步电机矢量控制系统进行仿真分析和实验,验证了方案的有效性。
[1]唐任远.现代永磁电机理论与设计[M].北京:机械工业出版社,1997:161~272.
[2]KHOV Makara,REGNIER Jérémi,FAUCHER Jean.On-Line Parameter Estimation of PMSM in Open Loop and Closed Loop.Journal of illuminating Engineering Society,1967,p.224.
[3]M Khov,J Regnier,J Faucher.Detection of turn short circuit fault in stator of PMSM by on-line pa rameter estimation.19th International Symposium on Power Electronics and Electrical Drives,Automation and Motion,Ischia,Italy,2008.Power Electronics,Electrical Drives,Automation and Motion,2008:161-166.
[4]S Bolognani,M Zigliotto,K Unterkofler.On-line Parameter Commissioning in Sensorless PMSM Drives.Industrial Electronics,ISIE'97,1997,Vol.2,pp480-484.
[5]Raja Ramakrishnan,Rakib Islam,Mohammad Islam.Real Time Estimation ofParameters for Controlling and Monitoring Permanent Magnet Synchronous Motors.IEEE Transactions on Industrial Electronics,2006,53 (3):963-973.
[6]张宝强,韩雪岩,唐任远.基于有限元方法的永磁同步电动机等效电路参数计算与试验的研究[J].电气技术,2008,(4):11~14.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21 03:01:32
防爆电机(2020年6期)2020-12-14 07:16:54
防爆电机(2020年4期)2020-12-14 03:11:02
通信电源技术(2018年5期)2018-08-23 01:16:12
电测与仪表(2015年16期)2015-04-12 00:44:38
电测与仪表(2014年13期)2014-04-04 12:04:16
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:54
汽车电器(2014年8期)2014-02-28 12:14:29
河南科技(2014年14期)2014-02-27 14:12:08
新高考·高一物理(2012年5期)2012-04-29 20:27:57