
汽车碰撞预警与碰撞吸能技术结合的CST控制系统
2011-02-01 01:40:22杜青云雷正保魏书彬
中国机械工程 2011年6期
杜青云 雷正保 魏书彬
1.长沙理工大学道路灾变防治及交通安全教育部工程研究中心,长沙,410004
2.长沙理工大学公路工程教育部重点实验室,长沙,410004
汽车碰撞预警与碰撞吸能技术结合的CST控制系统
杜青云1,2雷正保1,2魏书彬1,2
1.长沙理工大学道路灾变防治及交通安全教育部工程研究中心,长沙,410004
2.长沙理工大学公路工程教育部重点实验室,长沙,410004
为了使螺纹剪切式(CST)碰撞吸能装置能像安全气囊一样,在汽车遇到危险时能够被迅速推出,以单片机控制系统为核心,设计了一种汽车碰撞预警和碰撞吸能技术相结合的CST控制系统。控制单元通过接收路面条件开关信号及车速传感器的车速信号进行数据处理,计算出汽车此时应保持的安全距离,并将该安全距离与毫米波雷达所测实际距离进行比较,一旦实测距离小于安全距离则启动报警单元。根据上述控制系统制作了一个相应的电路板,从而证明了系统的可行性。
汽车安全;碰撞预警;碰撞吸能;CST控制系统
0 引言
汽车行驶的安全性主要取决于驾驶人员,据统计,由驾驶员失误引发的交通事故占交通事故总数的75%以上。大部分驾驶员对纵向安全间距与车速的关系判断不清。奔驰汽车公司对各类交通事故进行的研究表明:若驾驶员能够提前1s意识到事故危险并采取相应正确的措施,则绝大多数交通事故可以避免,如果提前0.5s,则有45%的事故可以避免[1]。
因此,研究开发出道路追尾预防报警装置可以为驾驶员争取时间采取应对措施以避免事故发生;另一方面,当防撞系统发挥作用而驾驶员却由于主观因素未能及时反应时就需要一种能在事故发生后减轻乘员伤害和财产损失的吸能装置。
本文以新型的螺纹剪切式(cutting the screw thread,CST)碰撞吸能装置(以下简称CST装置)这一发明专利[2-3]为研究基础进行汽车碰撞预警与碰撞吸能技术相结合的CST碰撞吸能装置控制系统(以下简称CST控制系统)的设计。由于CST装置在碰撞吸能过程中是渐进、连续式地剪切内螺纹或外螺纹,剪切力基本为一恒定值,因此剪切过程平稳,可以有效地减小发生二次碰撞的概率。CST装置安装灵活,可以配合一定的传动装置,充分利用车外空间进行碰撞能量的吸收,因此,可以使车内乘员空间适当增大。
1 CST装置及传动装置介绍
CST装置的吸能机理不同于传统的压溃式吸能机理,它利用冲剪螺纹的过程来吸收碰撞能量,其结构图见图1。其中,伸缩螺杆1可由电机9通过传动螺母2进行驱动,当出现危险状况时迅速伸出车外,发生碰撞时,伸缩螺杆1受到冲击,最终和冲击凸台10一起运动,并剪切吸能螺纹6来吸收碰撞能量。
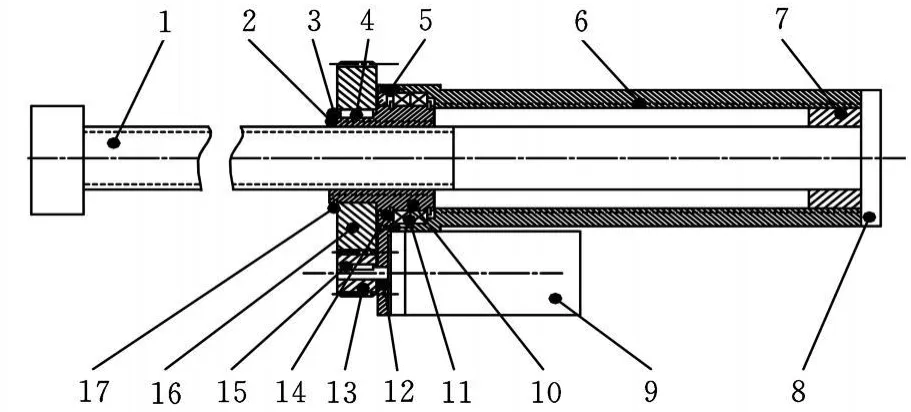
图1 CST装置结构
2 系统设计方案
系统以ATmega128-16AC芯片作为主要控制单元。控制单元接收路面条件开关的信号及车速传感器的车速信号并进行数据处理,计算出汽车此时应保持的安全距离,然后将其与装于汽车前部的测距仪所测实际距离进行比较,一旦实测距离小于安全距离或自车车速超过80km/h,则启动报警单元提醒驾驶员采取应对措施以避免发生追尾碰撞事故;同时控制电机驱动CST装置伸出使其在危险不可避免时吸收碰撞产生的能量,保护汽车及乘客安全。图2所示为系统的结构框图。整个系统由安全距离模型、测距模块、测速模块、驱动模块及相应的软硬件组成。
2.1 安全距离模型计算
通过分析自车在各种路面状态下应保持的最小行车间距并对其计算公式中的参数进行分析,建立了一个安全距离模型,代入具体参数计算出各种情况下的安全距离,见表1。

图2 控制系统的结构框图

表1 各种情况下的安全距离值
2.2 测距方式选择
目前,运用在汽车上的测距方法主要有超声波测距、毫米波雷达测距、摄像系统(CCD)测距、激光测距和夜间应用的红外线测距等几种。表2所示为各种测距方式的性能比较。
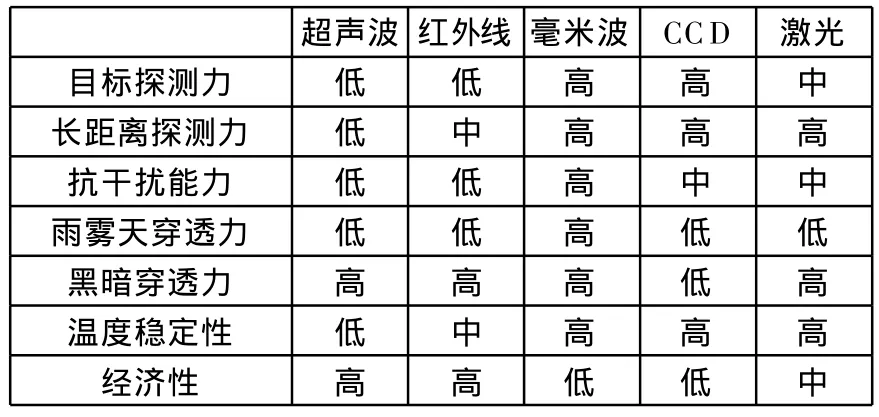
表2 各种测距方式的性能比较
综合比较,本研究选用德国Smartm icro公司的毫米波雷达 UMRRV 5.50作为测距设备。该款雷达是运用于汽车和国防安全及工业场合的先进传感器,目前已在各高档汽车(如大众、马自达、奥迪等车型)上得到应用。
2.3 测速传感器选择
测速传感器主要有磁电式、霍尔式或者光电式三种。综合比较,本研究采用光电式测速传感器作为测速传感器。由于其光敏三极管接收的是峰值波长为880~900nm的近红外光,而阳光的波长在280nm以上,易对光电传感器形成干扰,因此在应用时应避免阳光照到光敏三极管上。故在设计中,将光电测速传感器封闭安装于汽车底部,从而避免了阳光对传感器的干扰,封装也有效降低了灰尘对传感器的影响,增长其使用寿命。
2.4 电机驱动电路
由于直流电动机控制方便,调速性好,变流装置结构简单,长期以来经常在调速传动中使用[4],因此本系统采用直流电机作为驱动电机。
2.4.1 转速计算
在本系统中,直流电机的驱动及安装位置如图3所示,CST装置的吸能内螺纹全长为380mm,根据设计安全时间需求,螺杆要在3s内伸出,预留出1s的系统反应时间和电机启动时间,则螺杆要在2s内全部伸出。该螺杆螺距为10mm,则螺杆在2.0s内应旋转380/10=38圈。齿轮1与齿轮2的齿数比z1/z2=4.5,齿轮2的大径为40mm,齿轮1的大径为180mm,则直流电机应具有的转速为38×4.5/2=85.5r/s=5130r/min。传动螺母采用的内衬材料为Cr12M oV,螺母结构材料为ZQA l,这样可保证至少有8圈传动螺纹的情况下螺母能够剪断吸能螺纹且自身的传动螺纹不被破坏[5-6]。
(4)若患者在进行腹部CT检查前,曾进行过钡剂灌肠等其他造影检查且有造影剂残留的,不能进行CT检查,防止造影剂残留于肠内形成伪影,导致图像质量欠佳。

图3 直流电机驱动及安装结构尺寸图
2.4.2 转矩和功率计算
电机的选型要素中,驱动力矩是一个很重要的方面,参照图3可以看出该装置的驱动力矩计算包括三个部分,分别是电机驱动齿轮1的驱动力矩T1、齿轮1带动齿轮2旋转的驱动力矩 T2、螺母带动螺杆做螺旋运动的驱动力矩T3。相应的功率分三部分计算,分别为 P1、P2和 P3。由于三个部分均属于摩擦负载类型,因此电机驱动齿轮等结构所需转矩按摩擦负载电动机转矩和功率计算方法计算。摩擦负载电动机转矩计算分直线运动和回转运动两类,本装置属回转运动,参考机械设计手册[7]则可计算得到:
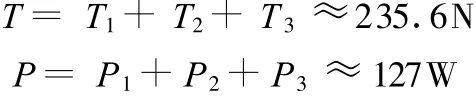
通过以上计算,选择SZ系列直流伺服电动机90SZ69作为执行电机。SZ系列微型直流伺服电动机广泛应用于自动控制等系统中用作执行元件,也可用作驱动元件。
3 硬件系统设计
基于实验条件限制,CST控制系统拟用一小模型进行模拟演示,这样不仅减小了设计难度,同时降低了开发成本。
(1)采用凌阳科技大学的超声波测距模组[8]进行距离数据采集,以代替模拟毫米波雷达测距模块,其功能结构见图4。
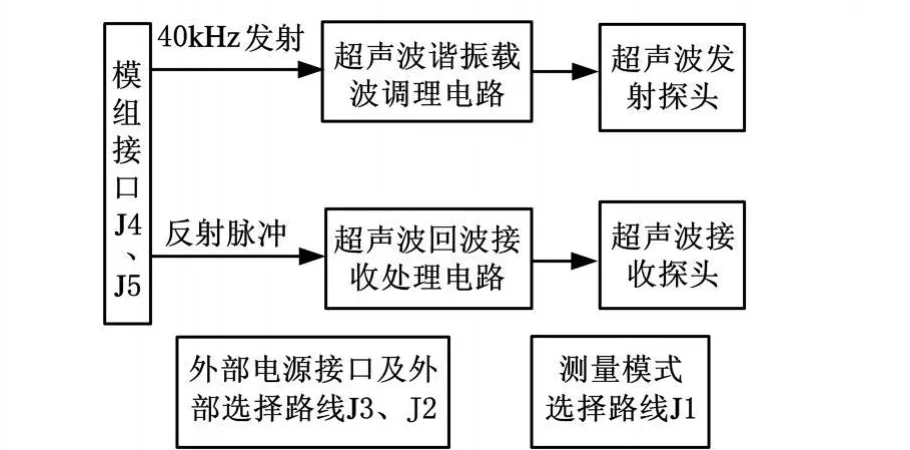
图4 超声波模组功能结构
(2)在小模型中采用FF-050SK-11170微型直流电机代替原系统中的直流电机。
本设计研究的对象是众泰2008型轿车,其轮胎型号为205/70 R15,即轮胎断面宽度B=205mm,轮胎断面高宽比(H/B)为 70%,为子午线结构轮胎,轮辋名义直径d=381mm(15英寸),通过下列公式可以计算出对应于各车速的模拟量(表3):
车轮外径


表3 对应于各车速的模拟量
4 软件设计
本系统子程序模块较多,程序较复杂,所以选用可读性强及修改较方便的C语言进行编程。编译软件选择ICCAVR。
根据系统的设计目的,即使被动安全装置CST装置具有主动防御功能,系统首先要进行距离测量、速度测量,并根据编码程序进行安全/危险状况的判断,然后根据危险情况进行译码显示、报警及控制CST装置伸缩,从而实现轿车主动报警和碰撞吸能技术的有效结合。
4.1 距离测量
主机通过PB6口接超声波模块,控制超声波模块发射脉冲信号。当PB6为高电平时控制系统开始发射脉冲,设置主机定时/计数器T3需要发射的脉冲的脉宽时间,并使PB6置高电平的时间为定时/计数器T3的定时时间。为了防止脉冲发射过程或返回过程中发生脉冲丢失导致接收不到回波脉冲的现象,系统发射脉冲时适当增加了脉冲数量,脉冲发射间隔很短,可以忽略不计。脉冲发出后,计数器开始计数,当发出9个脉冲后,PB6口置反为低电平,停止发射脉冲,停止计数,同时开启接收外部中断。
主机PD0接超声波模块脉冲接收单元的输出口,接收返回的脉冲信号。当接收单元接收到脉冲信号后,接收单元输出高电平,主机采集到该信号后才进行后续工作。
4.2 速度测量计算
设计中,要实现的最高车速是80km/h,所以系统设置了两个按键以实现对电机速度的加减控制,控制速度分八个挡位。
本车速度测量计算子程序中,主机P3.4接到测速单元输出口。设定主机定时/计数器T1,在定时器T1的定时时间内计数器1对测速单元的输出脉冲进行计数,再根据数学关系计算出速度,确定汽车当前的状态。将行车状态用 LCD显示并确定是否采取报警、抑制报警等措施。当自车速度低于30km/h时系统抑制报警并不断查询速度大小,一旦速度超过30km/h,系统即启动防撞报警功能。当自车速度超过80km/h时,电机驱动CST装置全部伸出,同时报警。开始测量时,首先初始化计数器 T1并进行测速,以PWM方式输出,在电平上升沿捕获的速度脉冲有效。然后,采用外部中断方式检测增减速按键是否闭合。增减速按键的闭合与否用读键盘指令send(0×15)来模拟,该信号用外部中断源INT3进行检测,如果是减速键信号同时速度大于0,则每按键一次,速度减小12km/h;若为增速键同时速度大于0,则每按键一次,速度增加12km/h。
4.3 危险判断
本控制系统设计的最终目的是在汽车有可能与前障碍物发生碰撞时,及时报警以提醒驾驶员采取紧急措施,同时将CST装置伸出以便驾驶员反应不及时汽车发生碰撞时能够起到保护汽车和乘员的效果。在报警模块中,单片机首先检测天气情况按键的选项值(该值由驾驶员根据实际路况人为设定,从而选择不同的安全距离模型),判断天气情况,进一步调出各安全距离模型下对应的安全速度并进行判定。若速度小于30km/h,则系统判定不需要采取任何危险防范措施;若速度大于30km/h,继续判断速度是否大于80km/h,是则报警并将CST装置伸出;否则继续检测速度在30~80km/h间的哪一速度段,调出相应的安全距离模型,判断当前距离值是否安全。安全则继续返回检测,不安全则报警并将CST装置伸出。
为了更方便地说明系统软件与硬件之间的联系,表4列出了系统控制芯片ATmega128各引脚控制功能。

表4 引脚控制功能说明
系统总体程序流程如图5所示。

图5 程序流程图
5 电路板调试结果
根据预警、碰撞相结合的CST控制系统的各个部分模块设计,最终完成了该控制系统的电路板总体制作,如图6所示。
本系统设置了3种天气情况选项值,每种天气对应有7种速度情况下的安全距离模型,合计有21种。当超过安全距离时,报警灯显示为红色,同时电机带动CST装置伸出;当大于安全距离即危险情况解除后报警灯显示为绿色,与此同时电机反转,带动CST装置回缩。
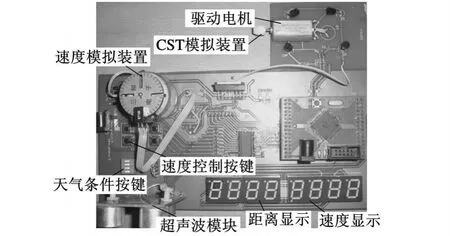
图6 控制系统电路板
采用主动测距报警和被动碰撞吸能装置相结合的方式,能够使汽车的碰撞安全性大大提高,使CST装置能够像安全气囊一样,在遇到危险时才将螺杆快速伸出,一方面能够以较小的吸能区长度吸收较大的动能,另一方面提高了系统可靠性,延长了系统寿命,降低汽车能耗,既适应目前的市场需求和电子发展趋势,又能从更高程度上提高汽车的安全性。
[1] Chen Yuanlin,Wang Chong'an.Vehicle Safety DistanceW arning System:a Novel A lgorithm for Vehicle Safety Distance Calcu lating between Moving Cars[C]//Proceedings o f the IEEE International Conference on Industrial Technology.Chengdu,2008:2570-2574.
[2] 雷正保.螺纹剪切式汽车碰撞吸能装置:中国专利.ZL03124568.4[P].2005-10-12.
[3] 雷正保.自适应冲击能量吸收装置:中国专利.ZL200710034933.2[P].2007-10-10.
[4] 雷正保,王素娟,张晓园.第二代螺纹剪切式汽车碰撞吸能装置的电子控制系统[J].汽车工程,2009,31(12):1185-1188.
[5] 杜青云,雷正保,魏书彬.基于主、被动结合的螺纹剪切式汽车碰撞智能吸能控制系统[J].公路与汽运,2009(1):6-9.
[6] 杜青云,雷正保,魏书彬,等.基于汽车安全状况的CST控制方法[J].交通科学与工程,2009,25(2):83-89.
[7] 徐灏.机械设计手册第四卷[M].2版.北京:机械工业出版社,2004.
[8] 凌阳科技大学计划教育推广中心.超声波测距模组V 2.0使用说明书[EB/OL].(2007-7-15)[2010-7-8].http://eelab.pku.edu.cn/pubdata/ebookother/ultrasonic.pd f.
CST Control System Based on Combination of Automotive Collision Warning and Collision Energy Absorption Technology
Du Qingyun1,2Lei Zhengbao1,2WeiShubin1,2
1.Engineering Research Center of Catastrophic Prophylaxisand Treatment of Road&Traffic Safety,M inistry of Education,Changsha University of Science and Technology,Changsha,410004
2.Key Laboratory of H ighway Engineering,M inistry of Education,Changsha University of Science and Technology,Changsha,410004
To make the CST device outstretch quick ly when the car is in danger just like a airbag,a control system w as devised.The control system took MCU(m icro controlunit)as the core,through receiving wheel speed signals from the sensor,the MCU w ill calculate the speed and the corresponding safety distance,then compare it w ith the actual distance measured by ranging system,if the actual distancewas less than the safety distance,the system will alarm and launch the CST in response to the danger because the driver did not response timely.According to the control system,an control circuit board wasmade at last.It p roves the feasibility of the contro l system.
vehicle safety;anti-collision warning;energy absorp tion;CST(cutting the screw thread)con tro l system
U467.14
1004—132X(2011)06—0751—05
2010—05—07
长沙理工大学道路灾变防治及交通安全教育部工程研究中心开放基金资助项目(K fj080304);湖南省研究生创新基金资助项目(CX 2009B183);国家科技行动计划资助项目(2009BAG13A 02);国家西部项目——京珠复线长沙至湘潭高速公路资源节约型和环境友好型科技示范工程项目(CXKJSF0107,CXKJSF0108-4);长沙市重点科技项目(K 0802090-11)
(编辑 苏卫国)
杜青云,女,1984年生。长沙理工大学汽车与机械工程学院硕士研究生。研究方向为汽车安全。发表论文3篇。雷正保,男,1964年生。长沙理工大学汽车与机械工程学院教授、博士研究生导师。魏书彬,男,1984年生。长沙理工大学汽车与机械工程学院硕士研究生。
猜你喜欢
中学生数理化·八年级物理人教版(2023年11期)2023-12-26 07:50:10
数学物理学报(2022年3期)2022-05-25 13:33:28
科学(2020年3期)2020-01-06 04:02:51
铁道通信信号(2018年5期)2018-06-28 03:06:12
中成药(2017年12期)2018-01-19 02:06:54
电子制作(2017年7期)2017-06-05 09:36:13
汽车维护与修理(2016年10期)2016-07-10 08:17:41
小学生·多元智能大王(2015年3期)2015-05-25 11:31:43
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
汽车维护与修理(2015年6期)2015-02-28 12:17:04
