
自主式水下航行体模块化设计关键技术
2011-01-20 02:51姚文东黎劲松
舰船科学技术 2011年6期
姚文东,黎劲松
(中国舰船研究院,北京 100192)
自主式水下航行体模块化设计关键技术
姚文东,黎劲松
(中国舰船研究院,北京 100192)
针对自主式水下航行体(AUV)柔性化设计问题,通过对国外AUV研制技术的分析,突破了传统的按分系统进行设计的模式,提出了面向AUV族的模块化设计及其关键技术。该技术的提出对促进我国AUV发展以及全面提高我国AUV研制水平具有一定的指导意义。
AUV;模块化;功能设计
1 概述
自主式水下航行体(AUV)是水下无人航行器(UUV)中的一种形式。UUV技术无论在民用还是在军事上都已应用,民用早期主要用于海上石油与天然气的开发等,军用主要用来打捞试验丢失的武器(如鱼雷),随后在水雷战中作为灭雷具有较大的发展。随着计算机技术、微电子技术、人工智能技术、导航设备小型化、指挥与控制硬件、逻辑与软件技术的迅猛发展,AUV得到了大力发展。由于AUV摆脱了系缆的牵绊,在水下作战和作业方面更加灵活,日益受到发达国家军事海洋技术部门的重视。
AUV是一种综合了人工智能和其他先进计算技术的任务控制器,集成了深潜器、计算机软件、传感器、能量储存、环境效应、转换与推进、新材料与新工艺、水下智能武器等,军事上用于反潜战、水雷战、侦察与监视和后勤支援等领域。
1)反潜战
AUV上可装备先进的探测设备和攻击武器,用于跟踪或攻击敌方潜艇,并在完成任务后返回母艇。AUV也可用作诱饵,引开敌方潜艇。AUV还可作潜艇远距离水下通信的中继站,增加母艇隐蔽性。在搜索侦察方面,AUV可作为艇外水声或尾流传感平台进行区域监视和情报收集。
2)水雷战
AUV可自主航行到目标海域实施水雷布放,其装备前视声呐和侧视声呐,可用于探测水雷或监视可疑雷场。
3)目标靶
装上靶雷的有关设备后,AUV可用于靶场试验、鱼雷鉴定或日常操练中充当靶雷,以试验、鉴定鱼雷的性能或提高海军使用鱼雷的作战能力。
4)侦察与监视
大型AUV续航时间长,可投放后自主航行至敌方或危险海域执行侦察和监视任务,能长时间隐蔽地采集信息。也可为两栖突击队侦察水雷、障碍等开辟水下进攻通道。
5)后勤支援
AUV可向海水中投放通信和导航装置,成为前方部署的网络中心的节点。还可以为前方运送急需物资,战后还可用来清理水下战场。此外,AUV还可用于寻找和打捞沉入海底的物体,如鱼雷、导弹、人造卫星等。
6)其他使用
AUV可用于其他一些水下领域,如海洋测绘、近岸巡逻、破坏、干扰、潜水支援、水下导向和求援,此外也可用做工作平台,在海洋施工中发挥作用。
由于AUV的主要特点是有效载荷种类繁多,任务要求灵活多样,因此在设计过程中有效载荷就必须适应平台的约束,采用模块化设计方法能有效实现AUV的柔性化设计,并针对任务的多样性要求,灵活、快速地进行AUV的配置。本文针对AUV柔性化设计问题,通过对国外相关技术的分析,突破了传统的按系统进行设计的模式,提出了面向AUV的模块化设计及其关键技术。
2 自主式水下航行体模块化设计研究现状
AUV发展的目标是提高功能密度和对有效载荷的灵活适应能力,而模块化设计与研制技术是实现这一目标的重要途径。在实现AUV模块化设计方面各国都开展了相关的研究。
柔性化平台以高性能的单元功能模块为技术基础,国际上已经应用的AUV就具有单元功能模块的基本技术特征。美国海军水下作战中心(NUWC)、美国海军研究局(ONR)、美国海军海洋系统中心(NAVOCEANO)等多家海军研究机构都在从事UUV的研究工作,研究内容涉及UUV的续航力、能源与推进、传感器信号处理、通信、使命管理控制、导航和运载器设计等。其中,按照1994年美国海军制定的UUV发展计划开发的一种高性能的公用模块,有极强的通用性,与有效载荷之间的接口简单,能实现多种有效载荷的一体化设计和柔性化集成,因而对不同的AUV有较强的适应性。在这样的系统中,不考虑传统的AUV子系统边界,设计过程强调的是每个通用系统的功能要求的识别和规格,其结果是1个高度集成的AUV,直接实现各研制单位AUV不同功能模块的综合应用。
英国国防研究局主导开发的AUV其物理结构由总线模块、有效载荷模块和推进模块组成,其中的每个模块都可以完全独立地进行集成和试验,同时对与有效载荷的物理和功能接口进行了标准化设计。此外,英国还参加了欧共体的一项合作研究,目前正从事AUTOSUB方案的研究,为欧共体开发1个试验型AUV,该AUV被称为“海豚”(Dolphin),其工作深度为6 km,强调模块化开发方式,既便于海军各单位及科研院所合作开发,又有利于电子设备、功能单元的换代升级。
德国的STN、HDW等几家公司正在为德国海军研制一种用于反潜战的水下无人航行体——TCM/TAU 2000鱼雷对抗系统。该系统主要由探测设备及信号处理装置、指挥控制装置、发射集装箱、4个铰接盖板和TAU效应器组成,能进行全方位的区域侦察,作战系统信号处理时间短,反应速度快;发射速度快,使用效应器后可不受潜艇战术的限制;效应器对付轻型鱼雷和重型鱼雷的威胁都有很高的效能。由于采用了模块化设计,该系统能很容易地装配到209和212型潜艇上,其费效比很好。
国外设计AUV的过程均采用模块化结构,通过对个别模块的简单修改和不同模块单元的组合应用,即可满足不同的任务需求和有效载荷要求。本文针对模块化设计方法在水下潜器应用的广泛前景,对AUV模块化设计的关键技术进行探讨。
3 AUV族的概念
基于柔性化平台的AUV族的研究与设计是适合不同功能任务和有效载荷要求的行之有效的研制方法。族设计是针对大规模定制生产模式提出的一种设计方法,即它不再是针对单一的产品进行设计,而是面向一族产品,是一种基于通用平台实现大规模定制的有效设计方法。针对AUV任务要求灵活多样、载荷种类繁多的技术特点,提出了AUV族的设计概念,即:以通用平台为基础,并通过匹配能满足不同功能任务需求和不同有效载荷要求的个性模块组成的AUV的集合。
采用AUV族设计理念的优点在于它能满足用户群的需求提升,实现AUV新技术的快速应用设计,同时能最大化细分AUV之间的通用性,以实现AUV的模块化设计。AUV的特点是具有多种参数和性能指标,以满足用户需求的变化,这些参数和性能指标间具有一定的公比级差。只有建立合理的、能充分反映用户需求的AUV结构模型,才能在其基础上进行快速配置设计,以在短时间内设计出满足要求的AUV。
4 AUV的模块化设计理论与关键技术
由于传统潜器设计方法都是将潜器分为多个子系统进行设计,各子系统之间充满联系但缺少标准化接口,导致设计出的潜器任务指向性强,功能升级困难,冗余成分多,维修成本高。由于面向功能的分解方法适应面宽且已有较多的应用,本文通过对AUV按照系统设计的基础上,将各系统的功能分解划分出功能模块,按照标准化关系重新设计布局,继而通过对功能模块的集成来完成AUV的构造。
4.1 功能模块的概念
功能模块是AUV的基本组成元素,是一种实体的概念。如果从数学的角度对功能模块进行定义,则指每个功能模块都包含一系列参数即特征变量,可表示为 Mi=(Ai1,Ai2,…,Ain)。如果某1个功能模块被选中,则该功能模块的所有参数将会在进化设计过程中得到优化。这种从数学角度对功能模块进行定义,有助于对集成的AUV进行优化处理。其中的Aij可以是定性属性的描述,也可以是定量属性的描述。
完全模块化的AUV系统,包括头部、动能、控制通讯、推进驱动4个基本分段。根据使用要求,可在基本分段上增加不同的功能模块,如在头部分段可安装避碰声呐模块、多波束测深声呐模块、数字照相模块等;动能分段可安装电池模块、热推进模块;控制通讯分段中插入反向散射传感器模块、声速传感器模块、声学通讯模块、长基线(LBL)或超短基线(USBL)定位模块、DVL辅助惯性导航模块、测深仪模块、单频或双频侧扫声呐模块、温度盐度深度传感模块、管理规划模块等;推进驱动分段由推进电机和导管式螺旋桨集成设计。用户还可以根据需要增加负载模块,该模块包含以太网微控制器(用于与其余模块进行连接)、电源(用于给用户定制的传感器供电),另外,可提供负载模块软件开发包。
4.2 功能模块的划分方法
功能模块的划分是模块化设计的前提与基础。功能模块的划分以及功能模块的形成是一个复杂、影响因素众多、多目标的综合优化过程。AUV系统本身、客观环境、当前技术水平和任务需求等因素都影响着具体的模块化方法。
AUV系统是一个复杂的大型系统,构成系统的要素数量庞大,可将系统按照功能划分为能满足要求的较少的几个子模块,并用尽可能简单的模型来表示。模块划分是模块化设计的第一步,模块划分是否合理,直接影响AUV的功能、性能和成本。以功能相关分析为主进行模块划分的方法是将AUV总功能分解为一系列子功能,子功能还可以继续进行下一级的分解,在完成所有的功能分解后,按照一定的相关性影响因素进行聚类分析,形成功能模块。针对AUV系统,可以从子功能之间的功能相关、信息相关和空间相关的角度对功能进行分类划分,然后采用功能模型定量化建模方法,将模型中各个子功能与潜器传递的能量流、信号流相关联,并以使用需求为衡量尺度,建立需求功能数据库,并将功能与需求的关系定量化,由此作为模块划分与模块发展的主要依据。
AUV功能模块划分过程如图1所示:1)收集具有不同任务要求或不同有效载荷要求的用户要求,或是直接对现有AUV进行功能分析;2)确定功能,即将用户需求转换成相应的任务模块和总功能要求;3)对任务模块和总功能要求进行层次分解,将总功能和任务模块分解成一系列可实现的功能元,形成功能要求的层次结构,即功能树。
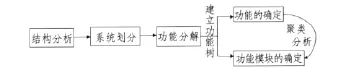
图1 AUV功能模块划分流程Fig.1 Flow chart of AUV function module
4.3 基于功能模块的AUV集成方法
集成是进行AUV族设计的关键环节,通过选择具有不同功能的模块,评价其集成的可能性和合理性,进而组合成具有特定的总功能及某些特殊功能或特性的AUV实体。
模块集成是根据设计任务选择出模块并集成为系统的过程,由于满足相应功能要求的模块可能不止1个,所以可能产生多个模块集成方案。
AUV的集成不仅仅指模块在结构上的叠加,更重要的是指模块在功能上的有机融合。达到这种功能上的有机融合,一方面可通过先进的集成处理手段,将不同功能的模块有机地集合成具有被处理各模块诸功能的新模块,使这些具有不同功能的模块在结构上实现一体化;另一方面,可通过各种软接口如导线、总线等在结构上不直接相关的模块间实现功能的综合。
在进行集成的过程中,通常要进行如下操作:
1)模块的沿用;
2)模块的增加;
3)模块的去除;
4)模块的替代;
5)模块用途的改变。
假设有4个模块(A,B,C,D)构成了 AUV模型1,可以通过对这4个模块的操作重新构成另一个具有不同任务要求的AUV模型2。图2显示了每个操作对模块化系统产生的影响。

图2 AUV模型集成图Fig.2 AUV model integration
在AUV模型1中使用的模块A,在AUV模型2中被沿用,并成为AUV模型2的一部分。3个可相互替代的因素构成了模块系列B,考虑到成本等因素,可以选择模块B系列类中的1个作为AUV模型2的一部分。由于无法满足用户的精度要求,在AUV模型2中将模块C去除。考虑到AUV模型2与AUV模型1的不同任务要求,增加模块E。模块D在AUV模型2中的用途被改变了。
5 结语
随着微电子、微机械等新技术的迅速发展及其在AUV上的大量应用,极大地提高了其集成度和功能密度,功能模块化研究已经成为潜器技术研究的热点。本文分析国外在AUV模块化研制方面所进行的工作,针对目前我国在AUV的研制现状,提出了面向AUV族的模块化设计理论体系,对提高我国AUV的研制水平将起到一定的推动作用。
[1]黄柳青,王满红.构建中国——面向构件的方法与实践[M].北京:清华大学出版社,2006.
[2]钱东,崔立.开放系统——鱼雷和UUV设计的方向[J].鱼雷技术,2007,(2):1 -7.
[3]陈洋,张涛,成俊康.AUV模块化建模的一种方法[J].机械,2007,34(9):7 -9.
[4]孙杰,孙兆伟,赵阳.微型航天器模块化设计及其关键技术研究[J].哈尔滨工业大学学报,2007,39(12):1908-1911.
[5]INDIVERI G.A switching path following guidance control law for an underactuated marine vehicle[R].IFAC Conference on Control Applications in Marine Systems,CAMS04,Ancona,Italy,2004.
[6]BARROS E.AUV Dynamics:Modeling and parameter estimation using analytical and semi-empirical methods[R].DSORL-ISR Technical Report,2003.
Key technologies of modular design facing AUV
YAO Wen-dong,LI Jin-song
(China Ship Research and Development Academy,Beijing 100192,China)
Aiming at flexible design problem of autonomous underwater vehicle(AUV),by analyzing research technologies of AUV,and breaking through traditional design according to sub-systems,modular design theory of AUV and its key technologies facing AUV family were put forward.The proposition of modular design theory is meaningful for improving the development and researching level of AUV.
AUV;modularity;function design
U674.941
A
1672-7649(2011)06-0149-04
10.3404/j.issn.1672-7649.2011.06.034
2011-05-06
姚文东(1978-),男,工程师,从事海洋船舶工程研究。
猜你喜欢
军民两用技术与产品(2022年1期)2022-06-01
军民两用技术与产品(2021年12期)2021-03-09
航天工业管理(2020年3期)2020-07-25
现代装饰(2020年5期)2020-05-30
太空探索(2020年5期)2020-05-19
汽车与新动力(2019年5期)2019-11-07
中国核电(2017年2期)2017-08-11
中国广播(2016年11期)2016-12-26
软件导刊(2016年9期)2016-11-07
电脑知识与技术(2016年21期)2016-10-18
