
智能小车的设计与制作
2011-01-06 07:53姜晓锋
科技传播 2011年14期
冯 超,姜晓锋
西南交通大学电气工程学院,四川成都 611756
智能小车的设计与制作
冯 超,姜晓锋
西南交通大学电气工程学院,四川成都 611756
本项目以2010年国家大学生创新性试验计划为课题背景,首先对智能型运输货物机器人总体设计方案进行叙
述,阐述各个要素的工作原理,然后就整个机器人系统分为四个模块,并对每个模块的设计和制作进行阐述。本项目“智能型运输货物机器人”是在一定空间和条件下自动完成对一个设定目标的搜索,并通过控制机器人的机械设备将其装载到小车上,搜索过程中可检测并躲避障碍物。本项目基于单片机系统来设计和实现,主要包括四部分,即传感器检测系统、单片机控制系统、电动机驱动系统、机械控制系统。集成了传感器技术、单片机技术、机械控制技术、程序设计与控制、Multisim仿真软件和PCB电路板的设计等知识,实现了控制、检测、运动及软硬件完美的结合。
机器人;单片机控制;设计;制作
1 设计任务概述
小车在无人操作的情况下可以完成循迹、避障等功能,并能检测到金属块发出报警声音。
2 系统方案论证与选择
本系统主要由微控制器模块、电源模块、避障模块、循迹传感器模块、直流电机及其驱动模块、金属检测模块、角度测量模块,语音提示模块以及液晶显示模块等构成。本系统的方框图如下所示:
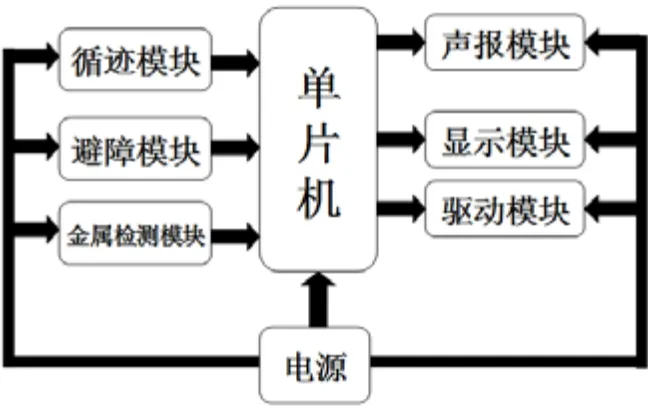
系统总框图
2.1 车体方案
小车利用履带前进的,比较平稳,而且左右轮是两个相同的电机分开牵动的,通过单片机控制可以利用两边转速差来实现转弯功能。这样,当两个直流电机转向相反同时转速相同时就可以实现电动车的原地旋转,由此可以轻松的实现小车坐标不变的90度和180度的转弯。
2.2 控制模块
采用MSP430单片机,MSP430系列单片机是一种16位的超低功耗的混合信号处理器。其之所以称之为混合信号处理器,主要是由于其针对实际应用需要,把许多模拟电路、数字电路和微处理器集成在一个芯片上,以提供“单片”解决方案。MSP430单片机更适合于低功耗、高速实时控制以及数据计算,它拥有更多的片上资源供设计使用,是设计的不错选择。
2.3 电源模块
采用7.2V可充电动力电池组。动力电池组具有较强的电流驱动能力及稳定的电压输出性能,经测试在用此种供电方式下,单片机和传感器工作稳定,直流电机工作良好,且电池体积较小、可以充电、能够重复利用等,能够满足系统的要求。
2.4 电机模块
采用直流减速电机。直流减速电机转动力矩大,体积小,重量轻,装配简单,使用方便,小车电机内部装有减速齿轮组,所以并不需要考虑调速功能,很方便的就可以实现通过单片机对直流减速电机前进、后退、停止等操作。
2.5 电机驱动模块
电机的驱动芯片选用L298N作为驱动芯片。工作稳定电机驱动信号由单片机提供,信号经过光耦隔离后,传至PWM控制芯片L298N,通过L298N的输出脚与两个电机相连。
2.6 避障模块
用漫反射式光电开关进行避障。光电开关的工作原理是根据光线发射头发出的光束,被物体反射,其接收电路据此做出判断反应,物体对红外光由同步回路选通而检测物体的有无。当有光线反射回来时,输出低电平。当没有光线反射回来时,输出高电平。
2.7 循迹模块
当小车在白线地面行驶时,装在车下的红外发射光发射红外线信号,经过白色反射后,被接收管接收,一旦接收管收到信号,输出端将输出低电平;当小车行驶到黑线时,红外线信号被黑色吸收后,将输出高电平,从而实现了通过红外线检测信号的功能。将检测到的信号送到单片机的I/O口,当I/O口检测到信号为高电平时,表明红外光被地上的黑线吸收了,表明小车在黑色的引线上;同理,当I/O口检测到信号为低电平时,表明小车行驶在白色地面上。
3 硬件系统的设计与功能实现
3.1 主线路板制作
在本项目中我们选择了制作双面线路板,优点是可以使线路简单,容易布局布线,很适合完成基本任务后的扩展,增加了电路板的可靠性,散热也较好,缺点是增加了制作工艺。
3.2 微控制器电路的设计与原理
微控制器电路是整个智能救援小车系统的核心控制部分,它负责对各路传感信号的采集、处理、分析及对各部分硬件电路进行调整。本设计制作的智能救援小车系统以MSP430F单片机控制电路为整个系统的控制电路,通过各种传感器电路,采集各种传感器信息,以发出各种控制信号命令,来完成相应的操作。
电源电路为系统提供基准电源,是整个系统工作稳定性关键所在,本系统采用7.2V可充电动力电池组,可充电反复利用,动力电池组具有较强的电流驱动能力及稳定的电压输出性能,经测试在用此种供电方式下,单片机和传感器工作稳定,直流电机工作良好。
3.3 电机驱动电路的原理与设计
本设计中采用的电机专用驱动芯片L298.L298可直接对电机进行控制,无须隔离电路。通过单片机的I/O输入改变芯片控制端的电平,即可以对电机进行正反转,停止的操作,操作非常方便,亦能满足直流减速电机的大电流要求。调试时在依照上表,用程序输入对应的码值,即可以实现对应的操作。
3.4 避障电路的原理与设计
用漫反射式光电开关进行避障。光电开关实际发射头与接收头于一体的检测开关,其工作原理是根据发射头发出的光束,被物体反射,接收头据此做出判断是否有障碍物。当有光线反射回来时,输出低电平。当没有光线反射回来时,输出高电平。单片机根据接收头电平的高低做出相应控制,避免小车碰到障碍物。由于接收管输出TTL电平,有利于单片机对信号的处理。
3.5 循迹电路的原理与设计
采用RPR220型光电对管完成系统循迹任务,循迹电路是用以实现小车沿着场地的黑色弧形引导轨迹BC进行前进和位置校正的,且小车不能偏离该轨迹。 本项目中采用RPR220型光电对管完成系统循迹任务,传感器的数据线输出信号为开关量,可直接与单片机的I/O引脚相连接,硬件电路实现比较简单,其灵敏度可以通过调节多圈电位调。
在循迹检测传感器设计中,我们在车体底盘的前端装有两个传感器,用来检测黑色弧形轨迹,起到循迹前进的作用。
3.6 金属检测电路的原理与设计
金属传感器性能的好坏对于该系统的功能是否能实现,起着十分重要的作用。我们选用的是LJ12A3-4-Z/BX型号的电感式接近开关进行金属检测工作,其电路原理如下图所示,由于其数据输出端通过5.1K上拉电阻,输出的是TTL电平,输出信号为开关量,可直接与单片机的I/O引脚相连接,硬件电路简单,容易操作。
[1]马忠梅,等.单片机的C语言应用程序设计.北京航空航天大学出版社,2007.
[2]胡宴如.模拟电子技术.高等教育出版社,2007.
[3]杨志忠.数字电子技术基础.高等教育出版社,2006.
[4]谢文和.传感技术及其应用.高等教育出版社,2002.
[5]祁伟,等.单片机C51程序设计教程与实验.北京航空航天大学出版社,2006.
[6]21IC中国电子网.www.21ic.com.
TP39
A
1674-6708(2011)47-0178-02
猜你喜欢
湘潭大学自然科学学报(2022年2期)2022-07-28
快乐语文(2020年36期)2021-01-14
科学大众(2020年17期)2020-10-27
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子测试(2018年15期)2018-09-26
电子制作(2018年8期)2018-06-26
电子制作(2017年1期)2017-05-17
电子制作(2016年11期)2016-11-07