实现超越:“混沌”超机动无人平台
2010-12-31 00:00:00扬羽
轻兵器 2010年17期

对于地面无人平台,我们通常所见的无非是履带式车辆或轮式车辆,这种行进方式的车辆具有结构简单的特点,但对复杂地形的适应能力较低。还有一种处于试验阶段的行进方式,即利用多关节机械腿交替摆动行进,其对复杂地形的适应能力较强,但结构复杂。那么,能否将这几种驱动方式结合在一起,取其优长?“混沌”超机动无人平台就是这一奇思妙想的产物——
目前,全球无人作战平台研究已进入爆炸性增长阶段。就层出不穷的地面无人平台来说,尽管其大小、功能各异,但行进方式却几乎全部采用轮式或履带式。这两种行进方式从根本上看,不外乎利用圆形轮的滚动(履带的转动亦依赖主动轮的滚动),实现对车体的推动。
驱动无人平台的另一种思路,是让无人平台像人或动物一样,利用多关节机械腿交替摆动的方式行进。两种思路的行进方式各有利弊,采用轮式或履带式结构简单,行进效率高,易提高速度,但对复杂地形的适应能力较低,交替摆动式则正好相反,结构复杂、速度低,但适应能力强。也正是由于这种方式结构复杂,至今仍只停留在试验阶段,距离大规模成熟应用有较大差距。不过,结合这两种行进方式的优点,实现真正“混合”型超机动性能的无人平台,现在也有不少机构正在着手开发。
其中,一家名为“自主方案”(Autonomous Solutions)的美国公司,已开发出代号“混沌”的超机动智能平台。正如其代号所暗示的那样,它以独特的技术途径融合了轮式和机械腿两种行进方式,为未来地面无人平台的设计拓宽了思路。
“混沌”项目的起源
现在的“混沌”无人平台已接近最终应用的形态,其车身两侧独立驱动的四根条状履带腿显示出优异的通行能力,可用于各种复杂地形环境下的侦察、监视和搜索任务,具有广泛的军事、民用价值。
不过,这一项目最初却并非由军方研究机构启动,而是由民间富有创新精神的小企业独自完成,后来才获得美国陆军坦克机动车辆研究与发展中心(TARDEC)的资金支持,为今天的成功打下了坚实的基础。
“混沌”的创意最早由“自主方案”公司时任项目经理的梅尔.托瑞(现为该公司CEO)提出,当时他希望设计一种融合车轮、履带和机械腿优点的车辆行进方式,既有轮式驱动的速度和效率,又有机械腿应对复杂地形的适应能力。
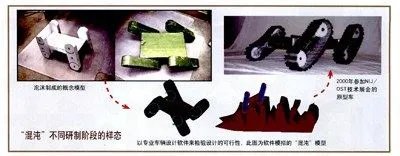
由于资金匮乏,托瑞最初只用各种玩具和民用车辆的零件试制了第一辆样车,但托瑞对这辆几乎仅由两条履带构成的车辆不太满意,很快又用乐高(Lego)拼装玩具组装了一辆完全概念化的模型。同第一辆车相比,它已初具“混沌”雏形,车体虽然平常无奇,但驱动部分的设计却非常有想像力,其四组车轮并未直接固定在轮轴上,而是分别通过两只车轮之间的固定梁连接在轮轴上,这样便使四组车轮都具有较高的自由度。
托瑞的这一创意很快得到了同事们的认可,陆续又有其他设计师加入了设计团队。他们将Lego玩具拼装成的模型带到当地联邦执法机构,征询未来可能成为用户的军方和警方的意见。之后,又用泡沫制成一个更具体的模型,并在当地警方的指导下继续完善设计。
在大致确定了车体的尺寸和结构后,托瑞的团队开始尝试用专业车辆设计软件来检验设计的可行性。经充分模拟,托瑞的设计被证明极具可行性,车体在具有较高行进速度的同时,还具有较强的对复杂地形的适应能力。
2000年春,经验证后的构想终于进入实体试制阶段,第一辆样车在三周内被制造出来,并被正式命名为“混沌”。当年6月,托瑞带着“混沌”参加了在科罗拉多州丹佛举办的2000年度美国司法部科学技术办公室(NIJ/OST)技术展会。无论从哪方面看,“混沌”都令人印象深刻。“混沌”的初次亮相虽然赢得不少喝彩,但仍未引起潜在用户的足够注意,在之后的两年里,托瑞带着“混沌”样车辗转于多家防务研究机构和大型防务企业,向他们推销“混沌”的不凡之处,但却鲜有投资者注意到它的潜在军用价值。
最终,“混沌”的先进设计理念引起了TARDEC的注意,当时,其正在启动一个名为SBIR的小型车辆机动性验证项目,“混沌”样车的适时出现正好满足了TARDEC的要求,遂通过SBIR项目向“混沌”项目注资,以开发出更具实用性的产品。
艰难蜕变,融合履带的机械腿
将一款概念样车变成具有实用价值的超机动车辆,还有大量工作要做。获得投资后,托瑞的团队于2003年开始重新设计“混沌”样车,以便使最初的设想达到可供生产的实用阶段。为了达成样车超机动性的性能要求,设计团队制作了多个样车,这些样车采用不同的驱动行进方式,同时定型了底盘、动力、传感器、控制和数据通信系统等要素。
融合履带的机械腿
设计中最大的挑战当然就是车体的驱动行进方式。传统上,大中型车辆采用轮式或履带式驱动方式,但将这类驱动装置等比例缩小应用于小型无人车辆时,其通行效率将显著降低。原本对大中型车辆不构成障碍的地面沟壑、坡路等复杂地形,对于小型无人车辆而言,则成为无法逾越的难关。因此,有人提出,小型无人车辆在应对这些障碍时,最佳驱动配置方式应是利用多关节机械臂或机械腿,模仿人或动物的行进方式,但如何提高这种方式在平地上行驶时的行进效率,则成为设计中的难题。
基于这些原因,TARDEC和托瑞在重新设计“混沌”的驱动模式时,保留了原先模型中让车轮具有较大自由度的思路,且为其搭配不同的驱动模式,如机械腿的步行机制、车轮或履带的滚动机制、机械腿和车轮混合搭配的模式等。最终,“混沌”选用了一种具有机械腿特点的长条状履带,作为其实现超机动性的主要驱动行进模式。这种结构和托瑞的最初构思非常相似,两者的区别在于最初构思的方案中,两只车轮为一组,共四组驱动肢,由其中心位置与轮轴连接;而最终方案则将四组双轮组成的驱动肢变为四条长条履带腿,履带腿的一端与车体相连,同时履带腿还可全向转动,依靠四条履带腿不同的转动角度,实现超强机动。
这样的配置方式极具想像力,较好地结合了履带和机械腿的优点。当在平地行驶时,履带腿放平,像平常的四履带车辆一样具有较好的行驶效率;当遇到履带无法克服的障碍时,则调整履带腿的高度与转动角度,以实现四条履带腿行走时的不同步态。此外,由于四条履带腿采用独立直流供电系统,可实现同向差速、异向同速或差速等不同转动,配合履带腿不同的配置角度和方向,可实现对不同类型障碍的穿越。比如,当在大角度陡坡上行驶时,由于小型车辆的自身质量较轻,极易倾覆或打滑,而结合了机械腿和履带行进特点的“混沌”在面对这类障碍时则能大显身手,它可将内侧履带腿放平紧贴陡坡高处,另一侧转动至垂直位置搭在陡坡低处,通过调节上下两边履带转动角度,实现稳步前进。在遇到崎岖的复杂地形时,“混沌”的四条履带腿还可以被动的方式适应不同起伏的地形,即各履带腿根据地形条件随时变化,以使所有履带腿都与地面保持最大接触面积。
车体及动力设计
在重新设计“混沌”时,其刚性车体也是设计的重点,最关键之处在于与四条机械腿连接的机械关节。每副机械关节有两套连接机构与履带腿相连,其中一套直接与驱动马达连接用于传递其输出的动力,但无法调节履带腿与车体的角度;另一套则正好相反,可调节履带腿的角度位置,但无动力输出。车辆在复杂地面行进时,通过各个机械关节与两套连接机构的配合,实现对机械腿的灵活控制。
车体的动力部分原先采用内置式锂电池,更换电池时需要拆开车体。为提高车辆的使用时间、简化维护,开发团队在车体上重新设计了动力舱,将内置式电池改为外置拔插式,同时还可根据任务需要添加额外的电池组以延长使用时间。
至于负载部分,“混沌”可搭载约10kg的各类设施,其最常见的负载是一支可全向旋转的可见光/红外视频摄像头,该摄像头具有10倍光学变焦和4倍数字变焦能力,是操作者遥控车体和监视、侦察环境情况的主要设备。而未来,开发团队也准备研制合适的机械臂,以使其能够在复杂环境下执行危险任务,比如IED装置拆除、扫雷和探测危险物质等。目前,加装机械臂的“混沌”样车正进入试验阶段。
“混沌”整体性能
在经过长达数年的不断改进完善后,“混沌”终于完成了由最初模型到成品的蜕变。“混沌”生产型的车体高20cm(履带腿放平)/52cm(履带腿垂直),车宽68.5cm,车长136cm(履带腿向前向后伸展)/71cm(履带腿全部向内收拢),整车质量约55kg,搭载的所有设备均防水防尘,适宜在各类复杂环境下使用。车载一块56V的锂离子电池组,还可再附加一块,使其使用时间最长延长到4小时(其履带行进模式的能量效率仍远低于轮式模式,但远高于纯粹利用机械腿行走的机器人)。在遥控通信方面,“混沌”采用商用无线网络构架,通过传输速率为54Mbps的无线网实现远达1km的遥控距离和侦察数据传输。在越障能力方面,“混沌”的表现就很突出了,它的时速可达8km/h,跟得上步兵行进的速度,可在角度达50°的陡坡上稳定行进,可跨越宽约60cm的深沟,可翻越50°的斜坡,至于其他复杂地形,如灾区的残垣断壁,则更不在话下。
超机动性能的实现
凭借着融合了履带特性的机械腿,“混沌”具有超强的机动性能。下面详细探讨一下它在不同环境下的履带腿位置配置。
适应性步态配置
这种配置也就是前文提及的履带腿被动设置,四条履带腿只接受来自车体的动力输出,各履带腿随地形变化而不断变化。这种配置对操作者而言也是最轻松的操控模式,无需对车体各活动履带腿做过多操纵,只需命令它前进或后退即可,特别适用于变化无规则、崎岖不平、且起伏不太大的路面状况;如果遇列的沟壑起伏较大,比如起伏的尺度超过履带腿的长度,就要不断调整、固定履带腿与车体的位置,并通过履带的转动实现行进。
越阶梯型障碍步态配置
室内楼梯或矮墙是小型无人车辆常面临的一道障碍,“混沌”在面对这类障碍时,其越障方式与PackBot机器人(见本刊2010年第5上期《PackBot:战场上的百变“背包”》一文)相似。遇到障碍时,其前方两副履带腿如图1所示向上翘起,搭上一级阶梯沿后,利用履带腿边缘的卡齿挂上梯沿,在后部履带腿的推动下爬上阶梯,在爬上第一级阶梯后,前方履带腿根据下一级阶梯的高度调整竖起的角度,以使履带卡齿能挂上梯沿……以此爬上阶梯。在攀越阶梯型障碍时,车体后部两副履带腿处于被动适应状态,其不与车体固定,而是根据已越阶梯状况搭靠在上面,利用履带腿推动车体行进。
“蠕虫”步态配置
在遇到具有规则起伏特征的路面时,为提高动力利用效率,需用到“蠕虫”步态,如图2所示。这种配置下,车体前方两副履带腿根据路面起伏特征,不断做旋转动作,而后方履带腿放平向前转动。行进时,车体头部不断抬高、降低,像蠕虫一样向前爬行。这种环境下,车体也可不断调整四条履带腿步行行进,但步行需要频繁调节履带腿与机械关节的角度、固定状态及动力输出,能量运用效率较低。

纯行走步态配置
当遇到地形复杂且起伏不规则的情况时,车体就需要采用纯行走步态,如图3所示。这种配置下,车体的四条履带腿根据路面的起伏情况,分别采取不同的固定角度和行进速率,像动物的四条腿一样,在起伏不定的路面上前行。在使用这种步态时,以一条履带腿的行进过程为例,它先转动以使履带腿一端触碰到地面,如果高度过高未碰到地面的话,车体其他三条履带腿就会向前推动车体,使车体前俯探低,以使这条履带腿找到固定点,触碰到地面,随后,这条履带腿上的压力传感器就会发出信号使之与车体相对固定,车体在获得稳定的支撑点后,另一条履带腿就会重复上述动作并找到稳定支撑点……四条履带腿依次如此,实现稳步向前行进。这种纯行走步态行进方式虽然速度较慢,但却采用了最先进的仿生原理,能够克服其他行进模式视若畏途的复杂地形。
合宜的折衷方案
地球上近一半的地面并不适于传统的轮式或履带式车辆行走,但是一般多足动物却能在这些地方行动自如。因此,足式车辆与轮式及履带式车辆相比具有独特的优势。与其他在研的纯足式作战平台相比,“混沌”可谓走出一条折衷之路。它所开创的融合履带功能的足式行进方式既有履带式车辆的高驱动效率,又具有一般足式作战平台对地形的高度适应性,同时其机械腿也未采用多关节、多自由度的复杂设计,在成本和开发难度上都较其他纯足式作战平台占优,其不失为目前一项合宜的方案设计。
编辑 刘