指导学生制作和调试机器人完成灭火任务初探
2010-12-29 00:00:00宋超
中国科技教育 2010年7期
随着经济和科技的高速发展机器人教学在学校中将会越来越被重视。指导学生制作和调试机器人完成灭火任务是每一个学生所必须掌握的基本技能,下面针对这一问题谈一下自己对这方面的看法。
一、灭火场地的研究
要想顺利完成机器人灭火任务。首先要让学生熟练了解灭火场地的布局和构造及搜索房间的路线。
机器人灭火比赛场地采用国际标准比赛场地,总共4个房间,按照机器人搜索房间的次序不同,走过的路径长短不同。那么消耗的时间也不一样;同样的,机器人行驶的难易程度也不同,因此选择一条合适的路径相当重要。
按照规则要求,蜡烛放在任意一个房间内,所以要求搜索房间时使用最优路径。按照搜索房间的次序有以下几种可能的路径:
(1)4-3-2-I,路径长度为608cm。
(2)3-4-2-1,路径长度为608cm。
(3)1-2-3-4,路径长度为624em。
(4)1-2-4-3,路径长度为582cm。
根据以上对比,很容易得出最优路径为1-2-4-3,但是考虑到传感器的安装位置,机器人到达3号房间门口时无法检测到火焰,于是采用以下路径:1-2-3-4-3。
第1次进入3号房间时,不检测火焰,直接退出到4号房间,等4号检测完后,再进入到3号房间进行检测。
这样做有两个好处:一是当火焰在门口相对较近的3或4号房间时,机器人多搜索一个房间会有0.35的减分系数,可观的减分系数相对于多走的路程还是相当有利的:二是可以避免3号房间传感器无法看到火焰的情况。
二、传感器的研究
传感器是机器人灭火必不可缺少的重要部件,学生只有熟练掌握这一技巧才能完成灭火这一任务。
在灭火机器人中主要使用了三类传感器,火焰传感器是用来探测火焰的;红外传感器用来测量小车到墙壁的距离,用来定位;灰度传感器主要是用来识别地面的白线。
1 火焰传感器
远红外火焰探头将外界红外光的变化转化为电流的变化,通过主板反映为0-1023范围内的数值。外界红外光越强,数值越小。因此越靠近热源,机器人显示读数越小。根据函数返回值的变化能判断红外光线的强弱,从而能大致判别出火源的远近。此外,远红外火焰探头探测角度为60°。火焰传感器的原理如图l所示。
根据以上原理指导学生在比赛中,在机器人前方加装三个以上的火焰传感器来探测火焰,这样机器人到达房间门口即可感应到火焰是否存在。从而进行灭火的选择。
2 红外测距传感器
红外测距传感器测量有效距离一般为10~80cm,对应输出电压为2.5VNOV。在机器人灭火调试中红外传感器安装的位置是至关重要的,因此如何指导学生安装并调试红外传感器是一个复杂的过程,需要让学生多方面去练习、调试。
3 灰度传感器
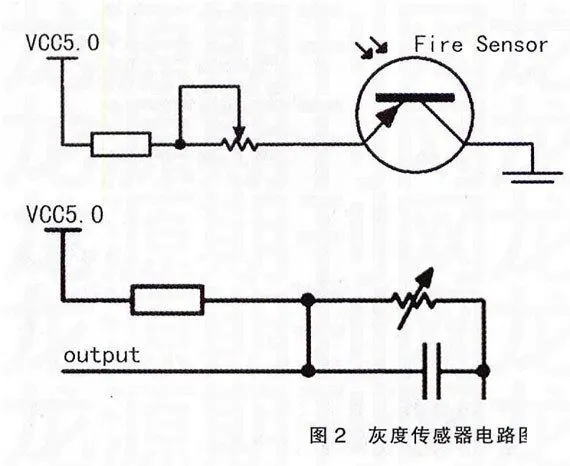
灰度传感器的作用是检测地面反射光线的强度,使机器人能识别地面颜色的深浅。在灭火比赛中,灰度传感器主要是用来检测地面的白线。灰度传感器是利用光敏电阻的阻值会随着光照强度的变化而变化这一特性制成的。
灰度传感器由两个主要部件组成:高亮LED和光敏电阻。LED通过串联一个限流电阻连到电源两端,使之提供反射光源。光敏电阻其实是一个能根据光照强度而变化的可变电阻,在电路中串联一个电阻进行分压,另外在光敏电阻两端并联一个104电容,降低信号干扰。灰度传感器电路如图2所示。
灰度传是一个运用比较简单的传感器只要设置好数值,安装好位置就可以了。
三、程序编写
程序在机器人完成灭火任务中起到指挥的作用,相当于人的大脑,因此程序编写的好坏直接影响着机器人灭火的成功与否。这一部分相对于学生来说比较困难,这就要求学生具备较强的逻辑推理和一定的程序知识。学生在写程序时一定要不断地探索、调试机器人在运行中所出现的问题,并将这些问题在实施时及时加以改正。
总之。机器人灭火调试是一个极其复杂和漫长的过程,学生只有长时间操作,不断地从失败中总结经验才能调试出灭火非常成功的机器