
CAN总线冗余系统的研究及可靠性分析
2010-12-27 09:17:44汤宜涌王传德
中原工学院学报 2010年5期
汤宜涌,王传德
(兰州交通大学,兰州730070)
CAN总线冗余系统的研究及可靠性分析
汤宜涌,王传德
(兰州交通大学,兰州730070)
针对解决CAN总线应用中的安全可靠性问题,研究了CAN总线冗余的方法,设计了采用不同冗余方法时的可靠性模型,并对不同冗余系统的可靠性进行了分析,得出CAN总线不同冗余系统可靠性的优劣.
CAN总线;冗余技术;模型;可靠性
虽然CAN协议本身具有较强的检错纠错能力,但在工业控制现场,插头连接的不牢固、传输介质的损坏或总线驱动器的损坏等都会破坏CAN的可靠通信;航天电子设备在生产、运输和使用过程中不可避免地经受着各种自然或人为环境的考验,必须要求在更加严酷的环境下安全、可靠地工作[1].这就要求CAN总线网络具有更高的可靠性.如何保证现场总线控制系统在恶劣环境下安全、可靠地工作,是CAN应用中的一个重要课题.
为了提高系统的可靠性,人们总结出2种提高可靠性的方法:一种是避错(Fault Avoidance),另外一种是容错(Fault Tolerance)[2].冗余技术就是在容错思想的指导下发展起来的.在以CAN总线作为底层网络的系统中,为了提高系统的可靠性和整体性能,需要对总线的各个部分进行不同程度的冗余.根据冗余硬件的结构形式不同,冗余可分为系统级、控制器级、驱动器级冗余等.
1 几种CAN总线型网络系统
1.1 无冗余CAN总线系统
如图1所示,无冗余的CAN总线收发电路包含一片单片机,总线控制器和单片机相连,采用82C250等芯片作为总线驱动器来实现CAN报文的收发.

图1 无冗余CAN总线系统
1.2 有冗余的CAN总线系统
典型的CAN电路可分为4个环节,即单片机、总线控制器、总线驱动器、总线.以下是目前从以上这几个环节考虑的不同程度的冗余方法:
(1)总线驱动器级冗余.如图2所示,总线驱动器级冗余的基本思路是使用2条总线电缆,每个节点内部使用2个总线驱动器,但只有1个总线控制器,在总线控制器与2个总线驱动器之间设置判断电路.如果1个总线发生故障,则关闭它与总线控制器之间的信号通道,而正常总线上的报文仍能顺利送往总线控制器[3].
(2)CAN总线控制器级冗余.如图3所示,总线控制器级冗余的基本思路是使用2条CAN总线,2个CAN总线驱动器和2个CAN总线控制器,单片机通过不同的端口和中断同时控制2个CAN控制器.
(3)系统级冗余.系统级冗余的基本思路是对整个CAN系统的4个环节进行冗余,即同时使用2套单片机、总线控制器、总线驱动器、总线.


2 CAN总线型网络系统可靠性模型的建立及可靠性分析
2.1 可靠性定义
系统的可靠性,通过可靠度R(t)来定义.可靠度就是在给定的时间间隔内、特定的条件下,系统仍能正常执行其功能的概率[4].
假设在相同条件下对N个样品元件进行实验,到t时刻,残留元件数为S(t),失效元件数为F(t),则元件的残留概率—可靠度R(t)为:

则有

定义失效率Z(t)为单位时间内失效数与残留数之比,即

假设生存期元件的失效率近似为常数λ,则Z(t)=λ,于是由式(3)得到:

当t=0时,R(t)=1,则对式(4)两边同时在0~t积分得:

可见,元件的可靠度随时间呈负指数分布.
2.2 可靠性模型的建立及可靠性分析
下面以总线电缆及元件为对象,分别建立CAN网络的可靠性模型并对各自的可靠性进行分析[5].设定单位长度总线电缆的失效率为λ,CAN总线收发器失效率为λ1,CAN总线控制器失效率为λ2,CAN总线CPU失效率为λ3,用方框代表各个元件.
2.2.1 总线型无冗余结构模型及其可靠性
如图4所示,设定单位长度总线电缆的失效率为λ,则节点i和节点i+1间总线电缆的失效率为Liλ,可靠度Ri(t)=EXP(-Liλt).

图4 总线型无冗余结构模型
假如Li已知,则Ri(t)已知,总线型无冗余系统属于串联系统可靠性模型,可求得:

2.2.2 总线驱动器级冗余模型及可靠性
如图5所示,驱动器级冗余CAN总线系统可靠性模型属于混联模型,在计算过程中需要进行串联和并联的等效.假如有n个元件并联,则[6]

图5 总线驱动器很冗余结构模型


由式(7)求得:2.2.3 总线控制器级冗余模型及可靠性
如图6所示,控制器级冗余CAN总线系统可靠性模型属于混联模型,在计算过程中需要进行串联和并联的等效,最终求出控制器级冗余CAN总线系统的可靠度为:
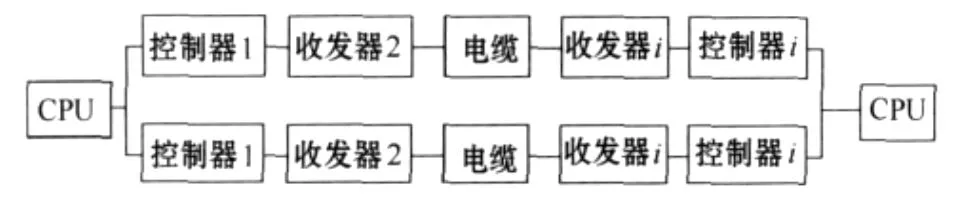
图6 总线控制器级冗余结构

2.2.4 系统级冗余模型及可靠性
如图7所示,系统级冗余CAN总线系统可靠性模型属于并联系统可靠性模型,可得其可靠度为:

图7 系统级冗余结构模型

比较无冗余系统可靠度、驱动级冗余系统可靠度、控制器级冗余系统可靠度、系统级冗余系统可靠度,可得:

由 此 可 得 结 论:Rwurongyu(t) < Rqudongji(t) <Rkongzhiji(t)<Rxitongji(t);系统级冗余的可靠度最高,控制器级冗余的可靠度次之,驱动级冗余的可靠度第三,无冗余系统的可靠度最低.此结论虽然是在2个节点组成的网络中得到的,但可采用同样的方法得到多节点网络中无冗余及3种冗余方式下同样的可靠度大小关系.可见,在不考虑成本的情况下,采用冗余的系统中,系统级冗余的网络可靠性最高,控制器级冗余次之,驱动器级冗余最低.
3 结 语
本文首先介绍了CAN总线型系统冗余设计在功能上与一般设计的不同,叙述了几种不同冗余网络,并合理设计其可靠性模型;接着给出了不同CAN总线系统的可靠度函数,通过对可靠度函数大小的比较,得出系统不同冗余的可靠性优劣.CAN总线网络中使用容错冗余技术,可缓解总线负荷,延长总线使用寿命.因此,对采用冗余技术的CAN总线网络的研究很有经济和实用价值,具有较好的研发前景.
[1] 汪涵.现场数据总线CAN网络的一种物理冗余技术[J].中国西部科技,2007(13):6-8.
[2] 郭晓松,王振业,于传强,等.基于CAN总线的容错冗余技术研究[J].计算机测量与控制2009,17(1):60-62.
[3] 禹春来,许化龙,刘根龙,等.CAN总线冗余方法研究[J].测控技术2003,22(10):28-30.
[4] 王利英.冗余CAN总线在船用发动机控制系统中的应用研究[D].哈尔滨:哈尔滨工程大学,2009.
[5] 张新福.CAN总线可靠性研究及其在灯光控制系统中的应用[D].哈尔滨:哈尔滨工程大学,2009.
Research of Redundant System Based on CAN Bus and Its Reliability Analysis
TANG Yi-yong,WANG Chuan-de
(Lanzhou Jiaotong University,Lanzhou 730070,China)
CAN Bus is one of the most widely used international field-bus,which is facing the harsh environmental challenges,to solve the safety and reliability of CAN Bus is necessary,particularly in areas of extremely high safety requirements.For the problem,through the research of the CAN-bus redundant methods,this paper designs the reliability module based on different redundant methods,and analyses its reliability,and obtains the pros and cons of different redundant CAN-bus system.
CAN Bus;redundant technique;module;reliability
F768.3
A
10.3969/j.issn.1671-6906.2010.05.019
1671-6906(2010)05-0073-03
2010-10-08
汤宜涌(1977-),男,河南郑州人,硕士生.
猜你喜欢
化工管理(2023年17期)2023-06-16 05:56:54
数学物理学报(2022年2期)2022-04-26 14:08:46
电脑爱好者(2020年6期)2020-05-26 09:27:33
电子制作(2019年20期)2019-12-04 03:51:54
计算机与数字工程(2019年7期)2019-07-31 09:55:10
经济技术协作信息(2018年7期)2019-01-14 03:05:40
光学精密工程(2016年5期)2016-11-07 09:06:04
电测与仪表(2016年3期)2016-04-12 00:27:30
上海电机学院学报(2015年3期)2015-02-28 14:29:52
上海航天(2014年1期)2014-12-31 11:57:26
