
基于嵌入式Linux的倒车影音系统设计*
2010-09-25 02:58:38毕如俊曹成茂郑泉石鑫焱葛俊
单片机与嵌入式系统应用 2010年8期
毕如俊,曹成茂,郑泉,石鑫焱,葛俊
(安徽农业大学工学院,合肥 230036)
引 言
电子信息与数字图像处理技术目前已被广泛地应用在各个领域,车载系统的信息化已成为现代汽车业的重要标志。现在的倒车雷达系统可以为驾驶者提供许多帮助,多数采用超声波测距技术[1-2],可以直接显示出车尾与障碍物之间的距离。但由于超声波的散射特性,如果地面有尖锐的突起或存在横在半空的棱角状物体,系统就不能有效地“察觉”。假如能为现有的倒车系统增加一个可视功能[3-4],那么驾驶员在倒车时不必回头就可清楚车后的情况。本文设计了一种可视化安全倒车系统,该系统采用嵌入式Linux操作系统内核驱动USB摄像头实现车后状况实时监控,通过判断超声波测距是否达到阈值来启动语音报警功能。
1 系统方案设计
如图1所示,系统由主控模块、超声波收发模块、USB摄像头图像采集模块、语音报警模块与LCD显示模块等。主控模块采用三星公司基于ARM9内核的S3C2440微处理器,主频最高可达533 MHz,处理速度快。采用软件编程技术实现对其外围电路的控制,并提供外围电路所需的各种信号,简化了外围电路的设计难度。
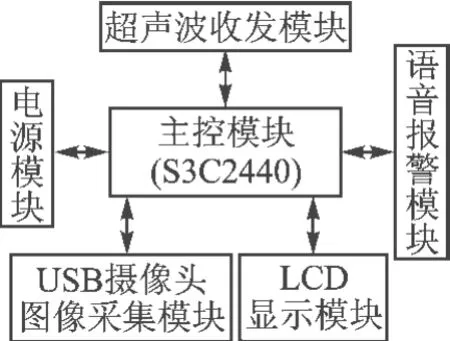
图1 系统总体结构框图
2 系统硬件设计
2.1 主控模块
以S3C2440为核心的主控模块硬件平台的组成如图2所示。
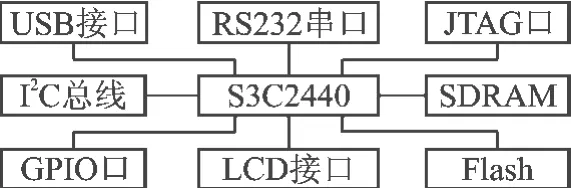
图2 主控模块硬件平台简图
2.2 超声波发射电路
超声波发射电路原理图如图3所示。发射电路主要由反相器74LS04和超声波发射换能器T1构成,使用CPU内部的PWM定时计数器输出的40 kHz方波信号。一路经一级反相器(U1C与U1E并联组成一级)后送到超声波换能器的一个电极(T1的1脚);另一路经两级反相器(U1D为第一级,U1B和U1A组成第二级)后送到超声波换能器的另一个电极(T1的2脚)。用这种推换形式将方波信号加到超声波换能器的两端,可以提高超声波的发射强度。输出端采两个反相器并联,以提高驱动能力。上位电阻 R1、R2一方面可以提高反相器74LS04输出高电平的驱动能力,另一方面可以增强超声波换能器的阻尼效果。
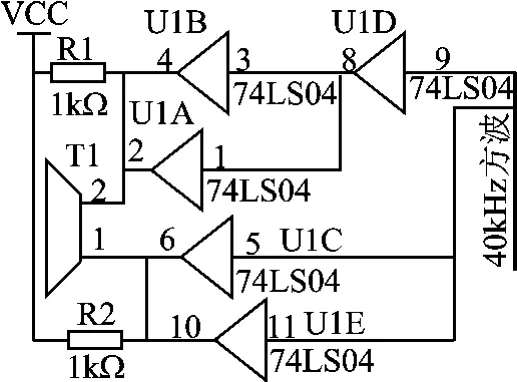
图3 超声波发射电路原理图
2.3 超声波接收电路
超声波接收电路原理图如图4所示。[5-6]CX20106A是一款红外线检波接收的专用芯片,常用于电视机红外遥控接收器。其优点是简单易用,电路连接简单,且减少了生产调试的麻烦。当CX20106A接收到40 kHz的信号时,会在第7脚产生一个低电平下降脉冲,这个信号可以接到ARM的外部中断引脚作为中断信号输入。
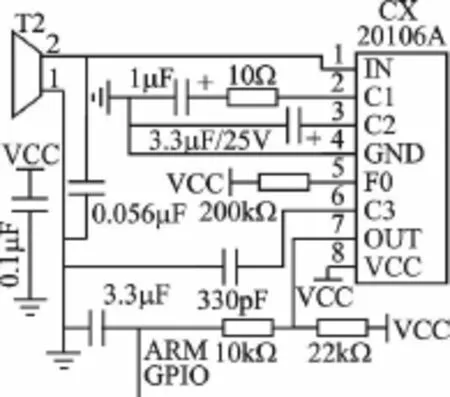
图4 超声波接收电路原理图
2.4 USB摄像头图像采集模块
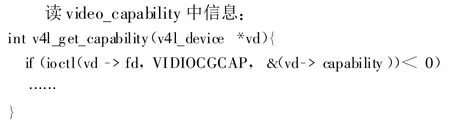
采用中星微电子ZC0301芯片组的USB数字摄像头。与模拟摄像头相比,其优势在于:CMOS图像传感器能直接产生图像原始数据;硬件支持标准的JPEG压缩;具有主流高速的USB总线设备接口等。对摄像头而言,USB总线的上的信息传输类型通常采用的是实时传输。USB设备端提供若干通信端口,主机与端口间建立起逻辑上的通信管道,进行数据传输。在摄像头的设备初始化阶段,主机与0号端口通信,驱动程序检测摄像头型号和所有端口信息。进入数据传输阶段,主机与探测到的实时输入端口建立通信管道,实时回传摄像头拍摄到的图像数据。
2.5 语音报警模块与LCD显示模块
语音报警模块采用的是安徽中科大讯飞信息科技有限公司生产的XF-S3011中文语音合成芯片。它是一款针对嵌入式应用领域而设计的单芯片处理器,具有合成任意中文文本的能力。XF-S3011通过串口(UART)接收上位机发送的命令和数据,命令和数据是以帧的方式进行封装与发送,允许发送的数据最大长度为200个字节。其驱动电路是用三极管驱动方式设计的。当超声波测得的距离小于所设置的阈值时,由S3C2440发送控制命令给XFS3011,启动语音报警提醒驾驶员注意。显示模块使用的是东华3.5寸TFT LCD(分辨率是320×240),采用嵌入式Linux下的Frame Buffer设备来驱动LCD。
3 系统软件设计
本文选择嵌入式Linux操作系统。它具有可裁剪、内核稳定、功能强大、支持多种硬件平台等特点。首先,在一台装有Linux操作系统的PC机(宿主机)上建立一个交叉编译开发环境,把S3C2440控制模块作为目标板。然后,采用移植性较好的C语言在PC机上编写本设计所需的底层驱动程序及顶层的应用程序,再利用交叉编译调试工具编译、链接生成可执行代码,最后向目标板移植。
3.1 视频图像采集及LCD显示程序的设计
第1步,采用动态加载ZC0301组芯片的USB摄像头驱动程序spca5xx。此驱动程序源代码由4个部分组成:设备模块的初始化模块、卸载模块、上层软件接口模块和数据传输模块。把它放在kernel/driver/usb下解压,打补丁。在编译系统内核时,在arm linux的kernel目录下进行make menuconfig;在<*>下选择 Multimedia device下的Video for linux,加载Video4linux模块,为视频采集设备提供编程接口函数和相关数据结构;(M)选中SPCA5XX这一项。
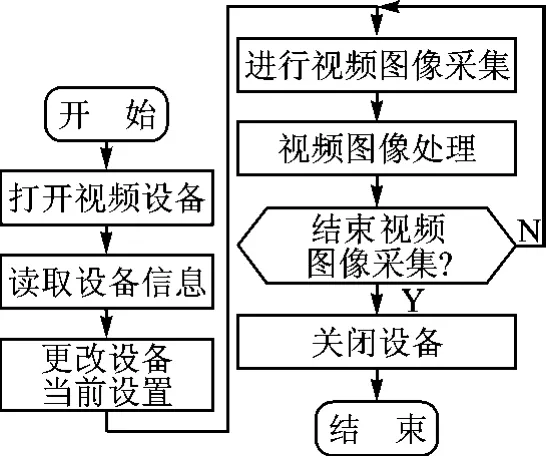
图5 视频图像采集流程
第2步,使用 Linux的Video4linux来访问USB摄像头设备,进行视频图像采集,捕获实时的数据流。程序流程如图5所示。
为程序定义数据结构:

打开视频:

本设计是通过MiniGui加载jpeg来实现LCD实时显示USB摄像头采集到图像的。在编译程序时,加上了jpeg库的支持。编程的思路就是不断地从摄像头采集图像并存储在/tmp/1.jpg中。在Linux图形用户界面支持系统MiniGUI中,通过loadbitmap函数来加载图像,而图像加载后不会自动更新,不能根据1.jpg的改变自动变化。因此,在程序中要设定一个定时器,每隔100 ms刷新屏幕,基本上实现了实时更新。
3.2 超声波测距驱动程序的设计
超声波发生程序[7]的作用是由PWM定时计数器产生一个超声波信号频率约40 kHz的方波。采用Timer0,同时把Timer1打开进行计时。超声波测距器主程序利用外部中断检测返回的超声波信号,一旦发现立即进入中断程序。进入该中断后立即关闭Timer1停止计时,并将测距成功标志字赋值1。各程序流程如图6~图8所示。
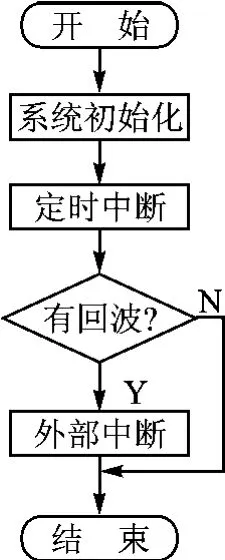
图6 主程序流程
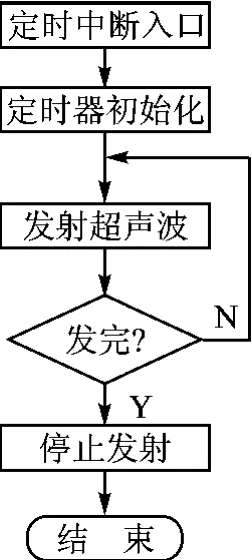
图7 定时中断子程序流程
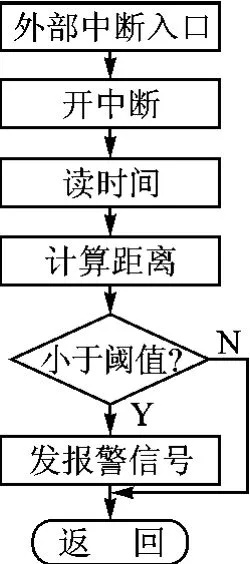
图8 外部中断子程序流程
当主程序检测到接收成功的标志位后,按下式计算即可得到车尾与障碍物之间的距离(设计时取20℃时的声速C为344 m/s):

其中,T1为计数器Timer1的计数值。
该部分程序可设计为Linux下字符设备驱动程序。要使用Linux系统提供一个设备驱动接口函数struct file_operations的数据结构[8-9],来实现超声波传感器设备的打开、读写、释放和控制。定时器和外部中断相关寄存器的初始化和参数的设定都是在open()接口函数中完成的。在此设备驱动程序中定义的file_operations的数据结构为:

s3c2440_sonar_open()函数用于打开的设备。s3c2440_sonar_read()和s3c2440_sonar_write()函数用于读写设备。s3c2440_sonar_release()函数完成中断的释放。s3c2440_sonar_ioctl()函数用于控制设备中定时中断和测距值,由copy_to_user()函数和put_user()函数来实现数据传递,在应用程序下打开设备,实现内核态与用户态之间的数据传递。模块初始化函数s3c2440_sonar_init()实现设备的初始化、中断初始化及处理、设备注册等。static void s3c2440_sonar_exit()用于模块卸载时中断停止、资源的释放等。
3.3 语音报警程序设计
当所测距离值小于阈值时,由 S3C2440发控制命令给XF-S3011,启动语音模块。组成一个语音合成命令帧[10]的部分代码如下:
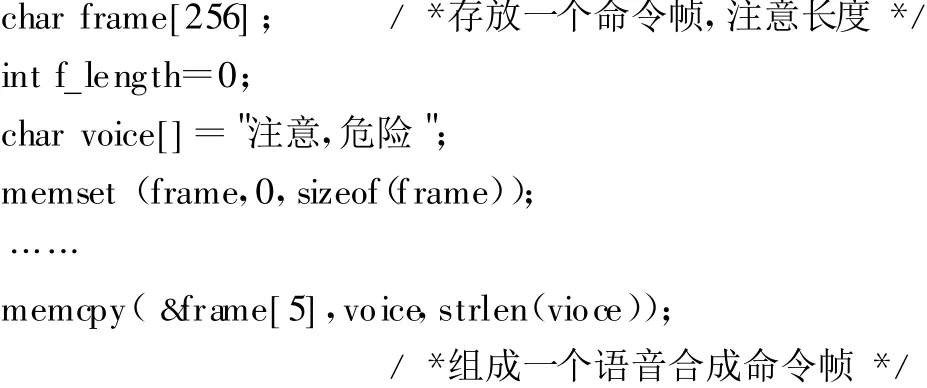
命令合成完毕后,就可以发送给XF-S3011模块了。在嵌入式Linux系统中先打开XF-S3011设备文件,然后将此命令帧写入该文件,最后关闭设备文件。
结 语
本文采用嵌入式 Linux操作系统和三星公司S3C2440微处理器设计的可视与语音报警为一体的安全倒车系统,具有较高的实用价值。在显示视频图像处理的过程中,能够通过超声波对车尾与障碍物之间进行测距,当测距值小于预设定的距离时会有语音对驾驶员进行报警提示。经实验验证,该系统运行稳定,能让驾驶员准确地把握车后路况,提高了倒车安全性。
[1]杨帆,刘畅,马俊,等.超声波测距仪研究[J].电子器件,2009,32(2):476-478.
[2]林伟,梁家宁,李才安.便携式多功能超声波测距仪的设计与实现[J].电子测量技术,2008,31(1):165.
[3]尹克,高明煜,陈吉锋.车载可视倒车装置的设计与实现[J].杭州电子科技大学学报,2007,4(27):1-4.
[4]易革,胡金亮.倒车多媒体测距终端的设计与实现[J].电子设计应用,2006,4(12):99-100.
[5]阮成功,蓝兆辉,陈硕.基于单片机的超声波测距系统[J].应用科技,2004(7):22-24.
[6]张珂,刘刚海.提高超声波测距精度方法的研究[J].现代电子技术,2007,30(15):139-141.
[7]基于超声波传感器的测距报警系统设计[J].科技信息,2009(7):58-59.
[8]杜刚,刘建一.基于ARM 的超声波测距系统设计[J].福建电脑 ,2009(3):138-139.
[9]单承刚,戴学丰,刘树东,等.嵌入式Linux下多路超声波测距系统设计[J].微计算机信息,2007,23(6-2):248-250.
[10]张辉,黄永强,夏爱华.中文语音合成模块XF-S4240在导航终端中的应用[J].单片机与嵌入式系统应用,2008(1):43-44.
猜你喜欢
中国交通信息化(2022年9期)2022-10-28 06:14:40
汽车工程师(2021年12期)2022-01-18 06:02:43
科学(2020年3期)2020-01-06 04:02:51
电子制作(2018年17期)2018-09-28 01:56:38
电子制作(2017年7期)2017-06-05 09:36:13
军事文摘·科学少年(2016年7期)2016-09-20 16:49:54
电子制作(2016年21期)2016-05-17 03:52:47
水利科技与经济(2016年4期)2016-04-22 03:49:32
汽车维修与保养(2015年8期)2015-04-17 03:32:59
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01 02:53:55
