
双馈水轮发电机励磁系统设计
2010-09-22 06:56:20王丹,孙静,马涛
电气传动自动化 2010年1期
王 丹,孙 静,马 涛
(1.兰州交通大学自动化与电气工程学院,甘肃兰州730070;2.西北勘测设计研究院,陕西西安710065;3.陕西省电力设计院,陕西西安710054)
1 引言
双馈水轮发电系统是一种新型的水力发电系统,通过调节励磁电压的幅值、频率、相位和相序,控制发电机励磁磁场的大小及其相对转子的位置和电机转速,独立调节有功功率与无功功率。为了更好地实现双馈水轮发电机系统负荷的优化调节,提高系统并网的稳定性,研究设计具有良好的静态稳定性、快速的动态相应能力、鲁棒性强、自适应能力好的励磁控制系统有重要的理论意义和工程价值。
2 系统组成及工作原理
采用双PWM交-直-交变频器可获得任意功率因数的正弦输入电流,具有能量双向流动的能力,它是一种满足双馈水轮发电机交流励磁电源要求的理想变频电源。励磁系统的主要两个部分是PWM整流和PWM逆变,这其中包括了交流侧电感、直流侧电容、采样电路、隔离驱动电路、DSP外围的键盘、LCD显示模块、通信接口。当发电机处于亚同步发电运行状态时,电机轴上的机械功率和转子输入的转差功率都以电磁功率的形式送到定子侧,再回馈电网,此时电机转子要从电网吸收功率,通过控制事件管理器输出的PWM脉冲信号的幅值和频率,实现调速,调节有功、无功的功率[1]。以DSP为控制核心的双PWM双馈水轮发电机励磁控制系统的结构图如图1所示。
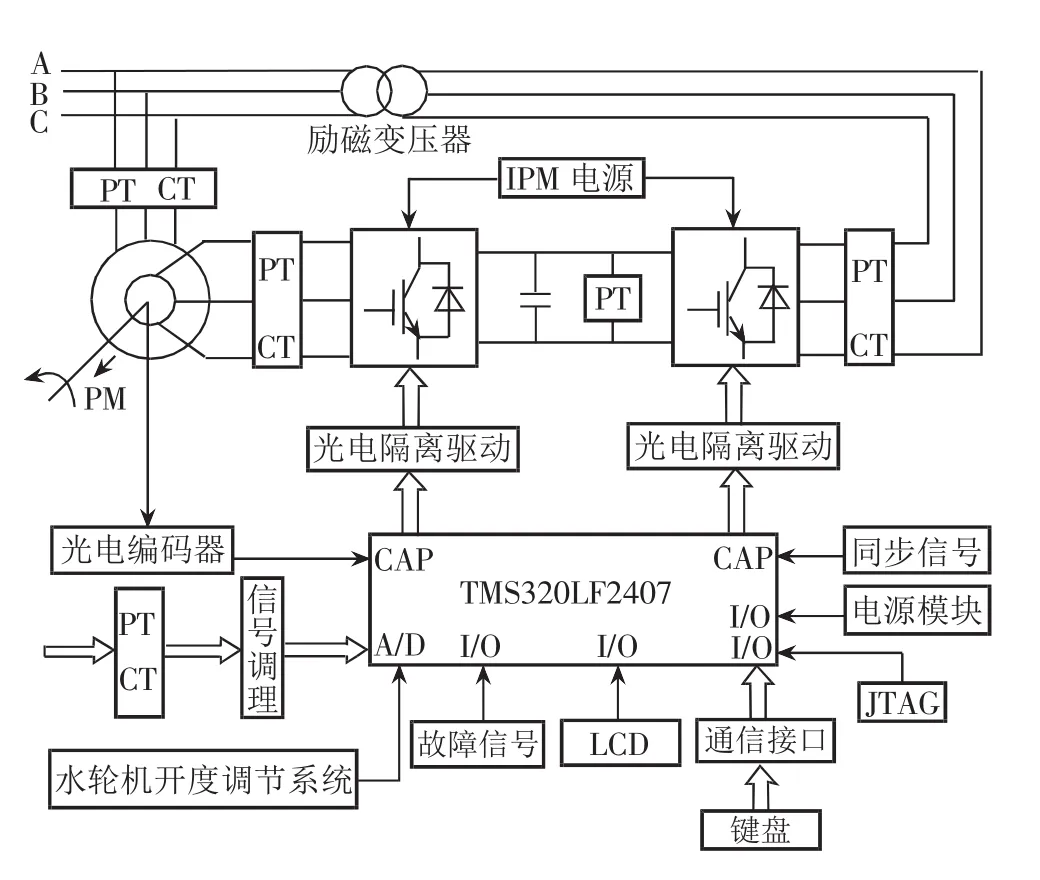
图1 双PWM励磁控制系统结构框图
3 硬件部分设计
3.1 主电路结构与参数选择
对于双馈水轮发电机来说,水头、负荷的变化[2],决定了双馈水轮发电机可以工作在不同的工况下:同步速、亚同步速、超同步速,采用双PWM控制的励磁电源满足了这种四象限运行,主电路结构形式如图2所示,图2中ua、ub、uc为三相电网电压,L、R分别为交流进线电抗器的电感和等效电阻,转子侧接双馈水轮发电机。
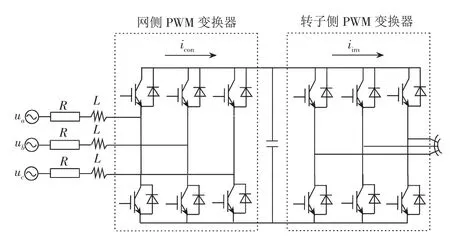
图2 双馈水轮发电机励磁控制系统主电路结构图
本文设计的双馈发电机功率400kW,额定电压为400V,励磁电流150A,电网最高电压(机端)460V。变频器的选择实际上就是功率开关管IGBT的选择,当采用SPWM控制时,IGBT桥路输出线电压最大值为460V,考虑2-3倍的安全系数,取额定电压为1200V,本系统选用IPM PM500CLA120,额定电压1200V,额定电流500A,开关频率最大15kHz;针对交流电感作用和选取要求,取L=0.7mH,电感采用铁粉芯制作,可以保证在较大的电感电流下磁芯不饱和;直流环节电容主要考虑开关频率、开关纹波电流、直流输出电压、输出纹波电压等因素,选用220μF电容并联入电路,耐压为400V。
3.2 主电路驱动电路设计
由于IPM(变频器)功率管内部把功率开关器件和驱动电路集成在一起,DSP输出的PWM信号经过光电隔离后送给IGBT的栅极。光电隔离选用IPM专用光耦HCPL-4504,该光耦具有极短的寄生延时;瞬时共模为15kV/μs;TTL兼容;开路输出等特点[3]。如图3所示为IPM驱动的典型电路。
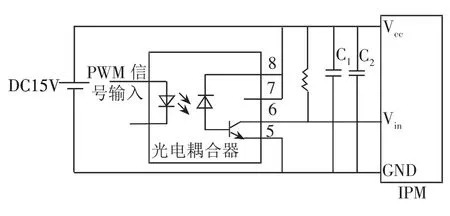
图3 IPM驱动典型电路
3.3 同步电路设计
所设计的同步方波变换电路由迟滞电压比较电路、高速光耦、过零比较电路组成,电路图如图4所示,54AC11151FK为八选一数据选择器,DSP的地址线A12、A13、A14控制输入模拟量的选择,选中的模拟量送给DSP ADCIN0端,数据选择器的使能端由IOPB5控制。
4 软件部分设计
4.1 网侧变换器的控制程序
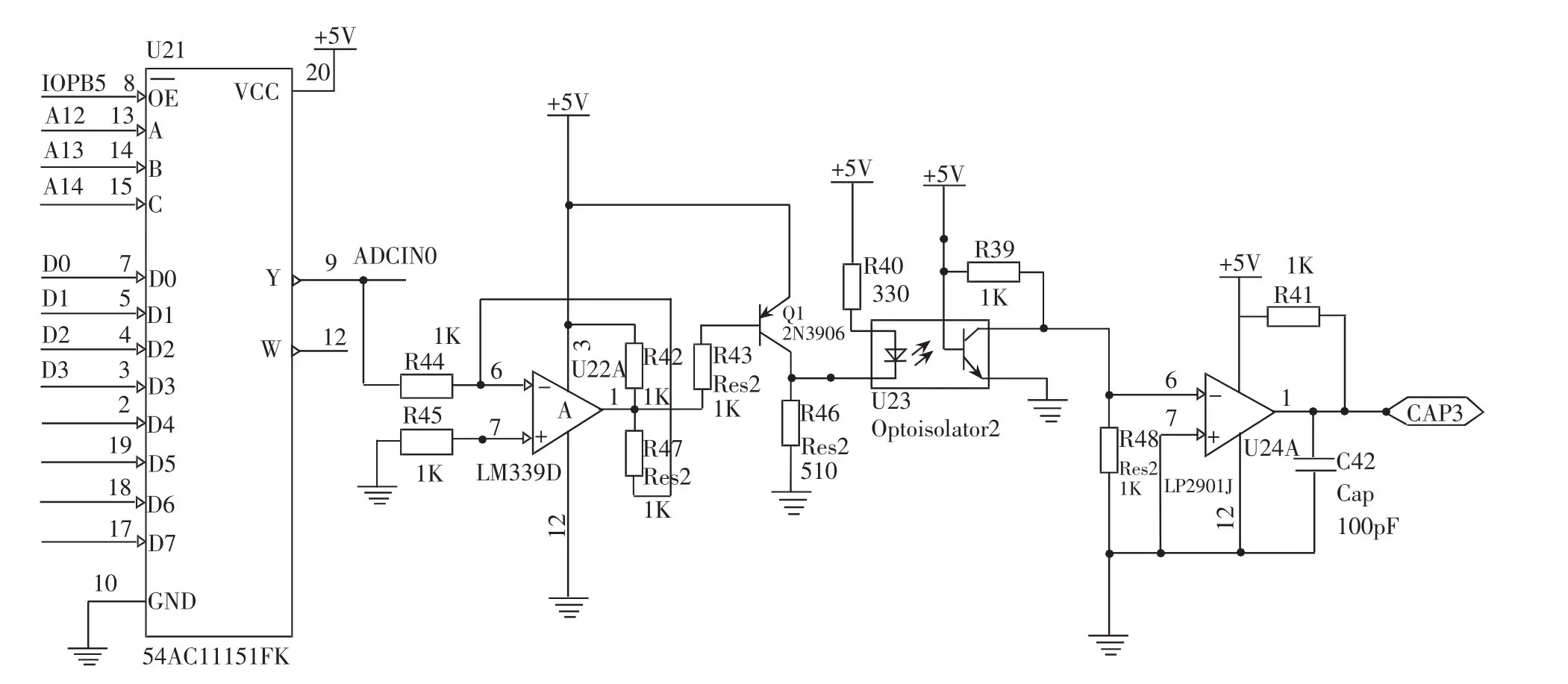
图4 同步电路
网侧变换器控制程序框图如图5所示。主要功能是通过控制PWM信号的幅值和频率使输出的直流电压跟随给定直流电压,维持输出直流电压的稳定性,使得网侧功率因数接近1。同时计算有功、无功功率,作为转子侧变换器的输入信号,也作为电能计算的依据。
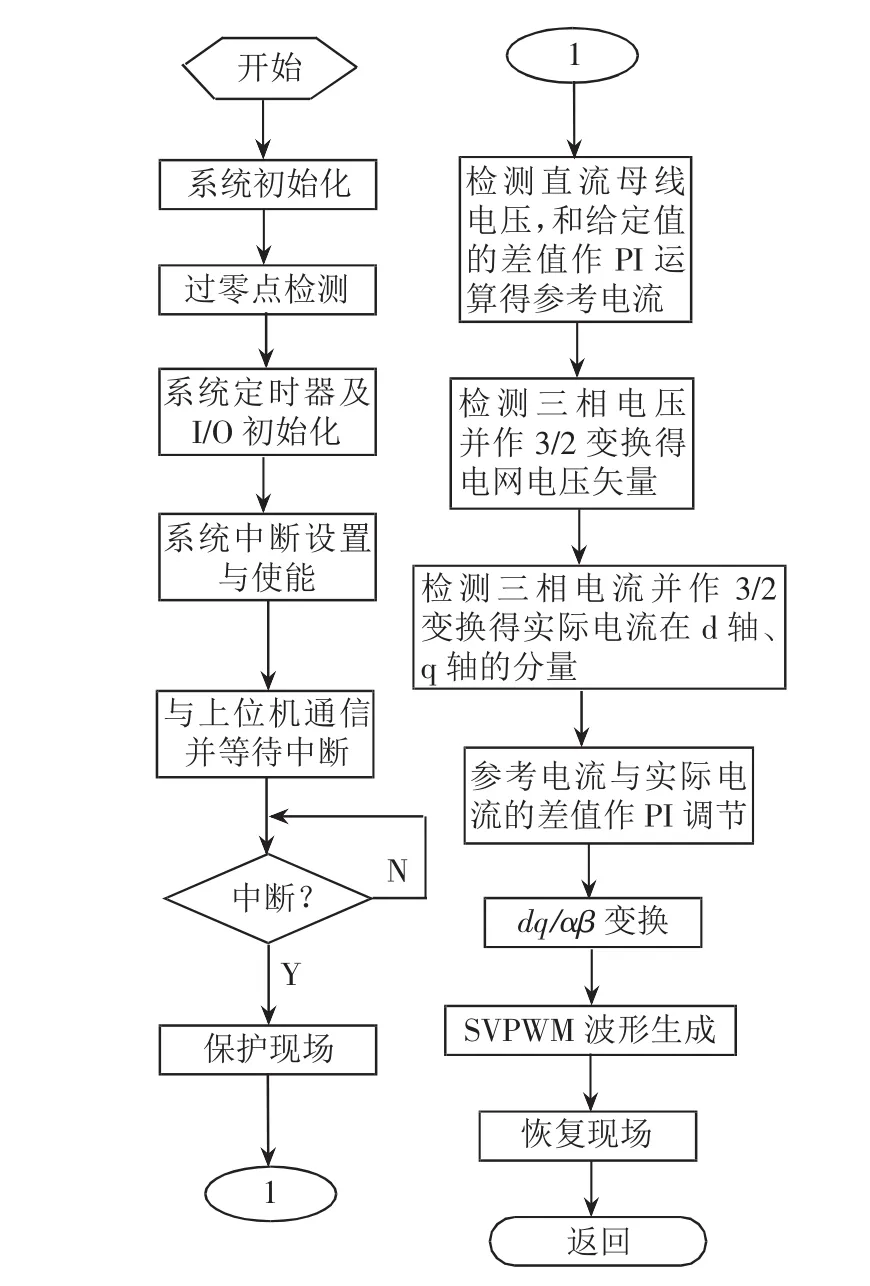
图5 电网侧变换器控制软件流程图
4.2 转子侧变换器控制程序
转子侧变换器控制软件流程如图6所示。主要功能是调节转速,独立调节有功、无功功率,调节电压相位,使输出的电能满足用户要求[4]。
5 仿真实验
基于DSP的双馈水轮发电机转子侧逆变器的仿真曲线如图7所示。电机有关参数如下:P=400 kW,R1=1.89 Ω,R2=1.4 Ω,J=2.2kg·m2,LS=0.196 H,Lm=0.187H,np=4,ne=120 rad/min。
开始时,发电机空载起动,在1.5 s时,逐渐加负载直至额定负载30 N·m,发电机实际负载转矩逐渐上升,定子三相电流也逐渐升高直至额定电流。3.5 s后负载突减为20 N·m,4.3 s时,负载又突变为30 N·m。从仿真曲线可以看出,全压起动时,在0.3s内速度、转矩等的瞬态值基本趋于稳态,电机完成了全压起动过程,实际转速为120rad/min;在0.3s以后,瞬态转矩、转速趋于稳定。系统上升时间约为0.2s,超调很小,对负载变化波动较小。实际转速在负载突变时,有一定的波动,但波动持续时间很短,很快趋于稳定。
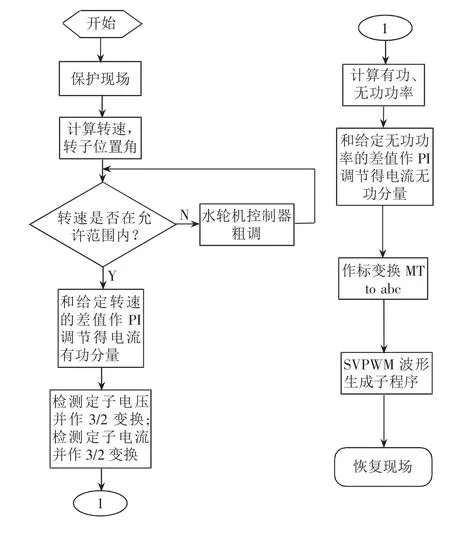
图6 转子侧变换器控制软件流程图
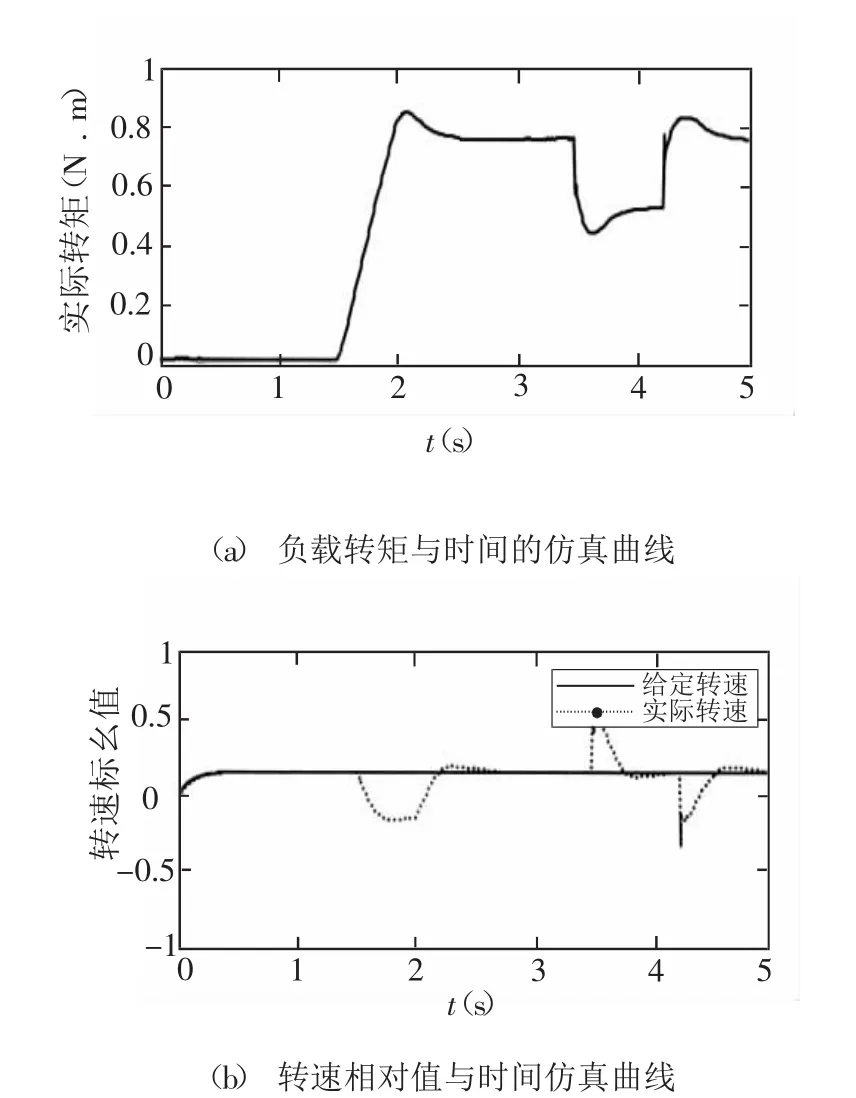
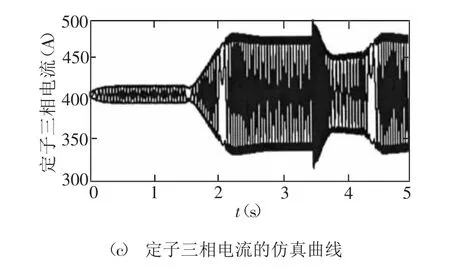
图7 双馈水轮发电机转子侧逆变器的仿真曲线
6 结论
本文介绍了双馈水轮发电机励磁控制系统的设计,对系统的主电路选择、主电路的驱动电路、专用电源电路、同步串行电路等分别进行了研究。软件设计部分对网侧、转子侧变换器控制程序设计时,结合水轮机PID调节器的调节量、无功、有功功率、水头等因素,可以实现双馈水轮发电的励磁控制和水轮机调节系统联合控制,从而达到系统负荷的优化调节。仿真结果表明,双馈水轮发电机动、静态性能良好,验证了软件编程的可行性和硬件设计的正确性。
[1] 刘和平.TM3S320LF240XDSP结构、原理及应用[M] .北京:航空航天大学出版社,2003.
[2] 李 辉.双馈水轮发电机系统建筑与仿真及其智能控制策略的研究[D] .重庆:重庆大学,2004.
[3] 崔 玮,Protel DXP实用手册[M] .北京:海洋出版社,2003.
[4] Mike Salo,Heikki Tuusa.A Vector Controlled Current-Source PWM Rectifier with a Novel Current Damping.Methed[J] .IEEE Trans.Power Electron,2000,15(6):464-470.
猜你喜欢
大电机技术(2022年3期)2022-08-06 07:48:18
防爆电机(2021年6期)2022-01-17 02:40:18
河北电力技术(2021年2期)2021-07-29 09:16:30
电子制作(2018年1期)2018-04-04 01:48:34
兰台世界(2017年12期)2017-06-22 14:17:25
大电机技术(2017年3期)2017-06-05 09:36:02
水电站机电技术(2016年1期)2016-02-28 14:22:01
电测与仪表(2015年16期)2015-04-12 00:44:38
大电机技术(2015年5期)2015-02-27 08:22:27
水电站机电技术(2014年4期)2014-10-13 08:30:07
