
永磁球形步进电机的结构研究与设计
2010-09-20 02:55范文韬杨益华
电气自动化 2010年6期
范文韬 夏 鲲 季 诺 杨益华
(上海理工大学光电信息与计算机工程学院,上海 200093)
0 引言
多自由度电机的研究始于上世纪50年代,其结构种类也较多,国外较典型的有:步进球形电机[1];三自由度永磁类型电机[2];永磁球形步进电机[3]等。国内对多种不同结构的多自由度电动机也进行了研究[4-5]。永磁球形步进电机与其它结构模式的球形电机相比,无需叠片结构,具有力能指标高、运行原理相对简单、体积小、重量轻、力能指标高、控制简单等优点,在工业机器人、机械手、人体假肢关节以及机床加工中心、全方位随动跟踪系统等一系列需要作多自由度运动的直接传动设备、仪器中,球形电机具有广泛的应用前景。
这种特殊结构的特种电机与传统一维步进电机相比,其运动及控制方式要复杂得多,传统的分析和控制方法显然不适用,要研究其运动特点和控制策略,必须首先研究其特殊的物理结构。永磁球形步进电机的结构对其稳定性和精确性有着重要的影响,设计并制造出一台完善的球形电机样机对于其后续深入的研究有着至关重要的作用。目前该电机结构还局限于理论上的研究或停留在粗糙的样机水平上,本文以永磁球形步进电机为研究对象,分析其结构,设计各部分参数,并绘出样机CAD模型,给出详细的设计方案和最终效果图。
1 永磁球形步进电机的基本结构
本文所研究的永磁球形步进电动机是三自由度永磁球形步进电动机,它是按一定空间排列规则分布的16个通电定子线圈和80个转子永磁体相互作用的精密系统。
其转子为非导磁材料中空球体,由两个中空的半球壳合并而成,内嵌80个稀土永磁体,永磁体的N极都指向球外。永磁体的精确定位很重要,可采用近似等边球面划分原则[6]对永磁体的空间分布进行定位,充分保证各永磁体分布均匀,可以使转子沿各轴向的转动惯量相等(Ixx=Iyy=Izz),消除转子球壳上的内部转矩,否则转子球壳的内部转矩将影响转子平衡。
定子由非导磁材料底座、内腔冠球形支架、16个铁磁线圈以及支架上起轴承作用的8个小圆柱轴承构成。同样采取近似等边球面划分原则对定子铁磁线圈的位置进行定位,并固定安装在环形支架上。该定子有个显著的特点就是定子对转子的覆盖范围小于半个转子球面,使得转子输出轴伸受定子包络的限制更小,大大扩展了转子的运动范围。其中,转子中的永磁体对称分布于不同定子线圈,这种分布可使通电定子铁芯线圈对其附近的永磁体通过磁力产生转矩,从而改变转子运动方向,通过一定的导电策略给定子线圈通电,就可以使铁心与永磁体相互吸附而产生转子相应的转动,拖动转子作任意的空间运动。该电机的控制由电路板控制定子线圈的通电来实现。
2 定转子磁极的球面定位
永磁球形步进电机的整体设计是建立在规则球面划分和定转子配合计算的基础上的。球形步进电动机换相原理的一个基本要求是要保证在一稳定状态时转子由两对或更多的定转子磁极来固定和定位,同时必须具有足够数量的相互接近并处于作用范围内的定转子对作为待选组合,以便在换相过程中产生转矩,使转子旋转切换到下一稳定状态。为了使电机步距角满足要求以及每一步都有足够的可选定转子磁极对用来步进换相到下一状态,需要在球面上放置相当数量的磁极。
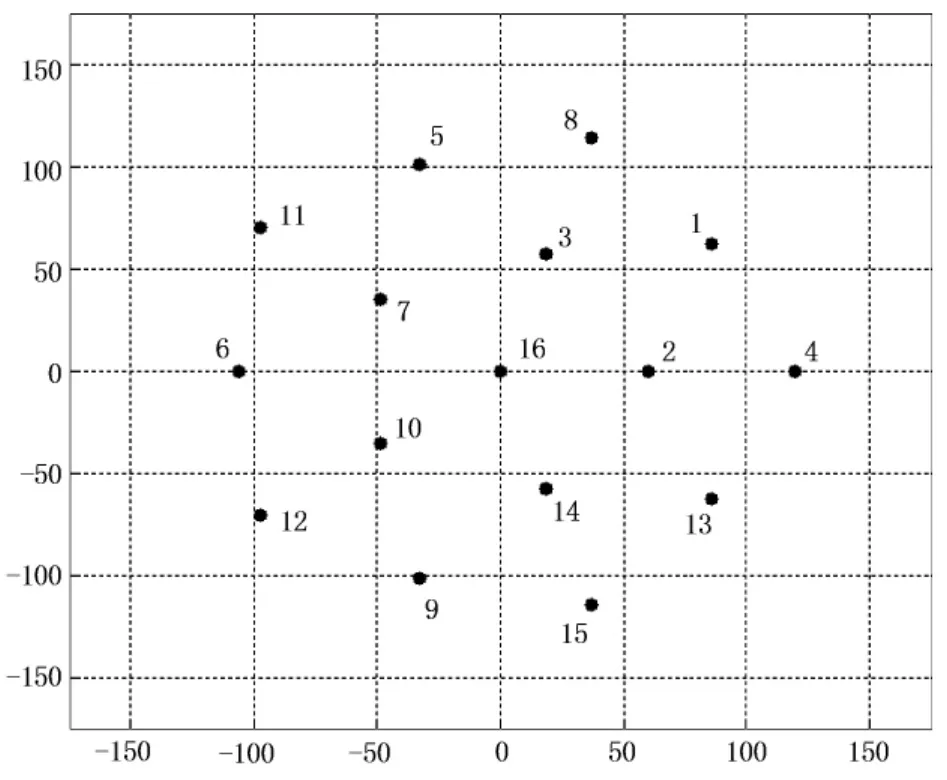
图1 定子线圈位置俯视图
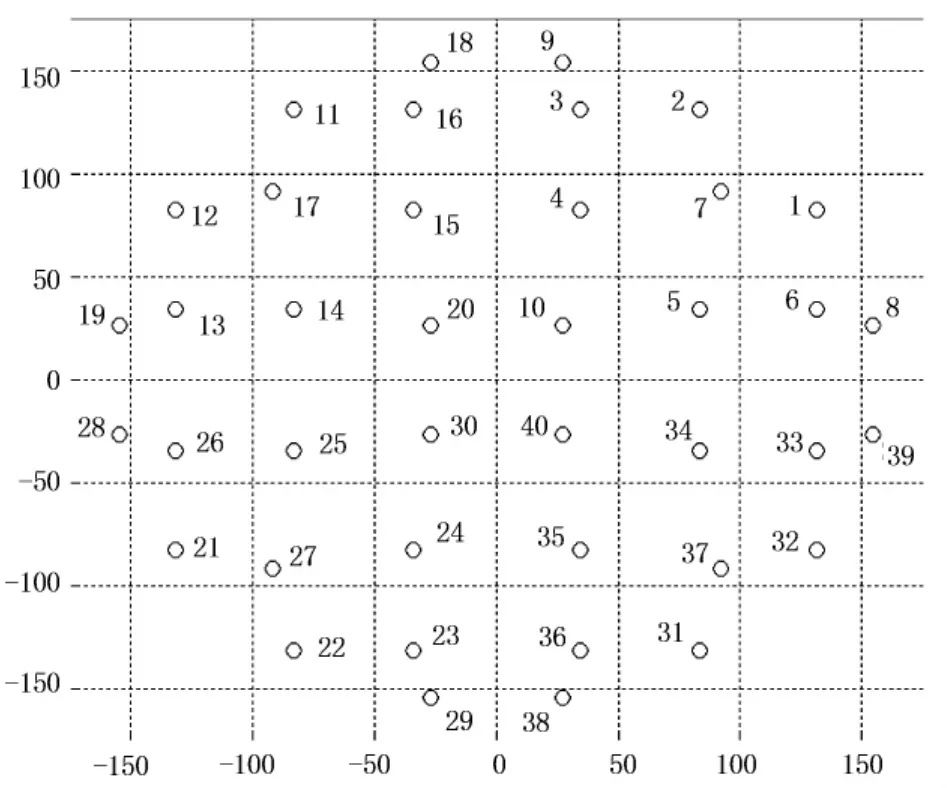
图2 上半球永磁体位置俯视图
Gregory S.Chidkjian和David Stein等人研制的永磁球形电机定转子磁极的位置排列是依据近似等边球面划分原则的磁极球面分布规则,文献[6]根据该原则计算出了转子上的80个永磁体以及定子上的16个铁芯线圈在单位球上的坐标。本文设计的永磁球形步进电机转子外半径为159mm,定子外半径为175mm,以球心为坐标原点,结合定转子球面分布规则和实际确定的电机定转子半径,计算出定转子的中心轴线在电机上的实际位置坐标。为了标志球形电机转子上的永磁体和定子上的铁芯线圈的相对位置,对定子上的16个定子线圈和转子上80个永磁体分别进行编号,如下图所示,图1是定子线圈位置俯视图,图2是上半球转子永磁体的位置俯视图。
3 定子线圈的选择
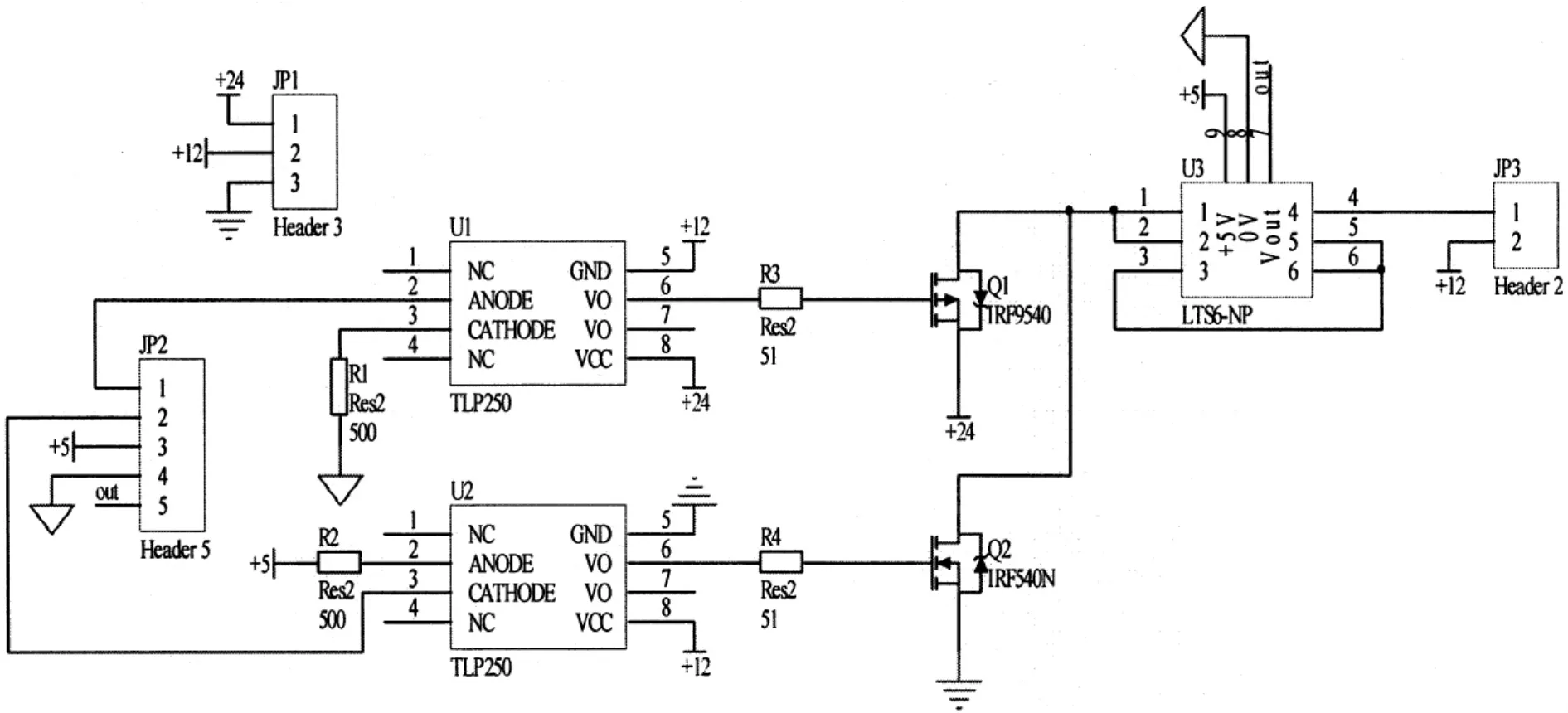
图3 单相电流跟踪PWM控制电路图
永磁球形步进电机控制驱动方式有继电器控制方案和电流控制方案等,对于各相定子线圈的电流,需要实现电流任意波形的有效跟踪控制,根据文献 [7]的分析比较,本文选择电流跟踪PWM控制的电流控制方案。定子线圈是实现电流跟踪PWM控制的关键器件,需要选定参数合适的定子线圈,为此本文设计了单相电流跟踪PWM控制实验,确保线圈的电感、电阻和峰值电流等参数能满足电流控制的要求。
电流跟踪PWM控制的基本控制方法是:给定电流信号i*a,并与电流传感器实测的电流信号ia比较,以其差值通过电流控制器来控制PWM逆变器相应的功率开关器件。若实际电流值大于给定值,则通过逆变器开关器件的动作使之减小;反之,则使之增加。这样实际输出电流将基本按照给定的电流变化。据此设计的单相电流跟踪PWM控制电路板如图3所示。
实际所采用的定子线圈如图4所示,定子线圈的电感对电流上升下降的时间以及开关频率有重要影响,为了测定线圈的电感,采用RL串联电路,其中R=10Ω,根据示波器的波形测得该串联电路的时间常数τ≈ 3ms,据τ=L/R,计算得到该定子线圈电感约为30mH,万用表测得其静态电阻为15Ω。
在此单相电流跟踪PWM控制实验中,CPU采用ARM处理器,当给定正弦波时,最后得到的单相定子电流波形如图5所示,从图中可以看出,该定子线圈能比较准确的跟踪到给定的电流波形,可以胜任永磁球形步进电机电流控制的任务。
4 样机部件的选择及结构参数设计

图4 定子线圈实物图
永磁球形步进电机的各部件是紧密联系在一起的,包括转子球壳、转子永磁体、定子支座、定子线圈以及小圆轴承等,各部分的参数是建立在器件几何结构相互配合的的基础上进行整体设计的,分析计算主要尺寸和结构参数对电磁转矩的影响十分重要。永磁球形步进电机的主要结构参数包括:转子球外壳外半径R1,转子球外壳内半径R2,中间层外半径R'1,中间层内半径R'2,内壳外半径R″1,内壳内半径R″2,转子磁极 (永磁体)半径r1,磁极高度h1,电机定转子气隙 δ,定子球外半径R3,定子球内半径R4,定子线圈外半径r2,定子线圈高h2,定子支座高H,定子支座圆柱外半径R5,内半径R6等,电机参数的优化能提高电机控制的准确性和精确度,现详细分析各部分的结构及参数。
转子球由两个中空半球壳合并而成,需要内嵌80个永磁体,球壳采用强度较大的塑料材质制造,以承受80个永磁体的重量和防止转子转动时的摩擦损坏。另一方面,为了保证内嵌的80个永磁体的安装稳定性,本文把转子球壳设计成三层结构,如图6所示。转子球内壳用以承受上部半球上的永磁体的重量,转子外球壳用以承受下部半球上的永磁体的重量,并且可以使转子球的表面保持光滑,减小转子球运动时的摩擦力。这样在内壳和外壳的共同作用下,显著提高了中间层的永磁体的稳定和整个球形电机的精确度。其中转子球内壳和中间层在物理上是连在一起的,外壳是在安装好永磁体后再覆盖到中间层外的独立球壳。经过计算,转子球各部分的尺寸参数如图所示。实际的转子球会在顶部留一定大小的圆孔,以插入输出转矩的力杆,转子球的实际效果如图7所示。
转子永磁体是产生电机磁场的关键部件,本文采用钕铁硼(Nd-Fe-B)永磁体。80个稀土永磁体的位置根据上述的转子极中心轴线在单位球上的坐标计算确定。本文采用的钕铁硼永磁体的规格为D20×5mm,充磁方向是厚度方向充磁。
据文献[8]的分析,电机最大静转矩随气隙的减小而逐渐增大,这与普通步进电机是一致的,但在工程应用中间隙过小会引起制造上的困难,同时也会对实际实验造成难度。普通步进电动机气隙小,一般不超过0.05mm, 永磁球形步进电动机的三维结构使得其气隙相对较大,本文为了制造和实验的方便,取气隙为5mm。
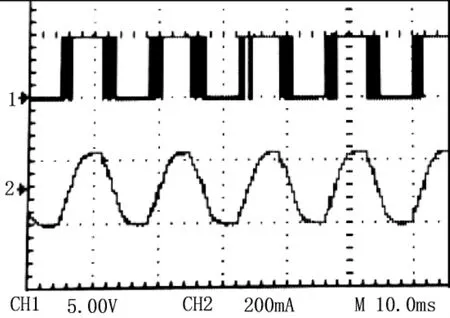
图5 电流跟踪实验波形
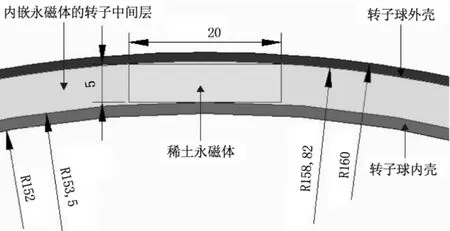
图6 转子球壳结构示意图
永磁球形步进电动机定子采用带铁芯的圆柱线圈,由上文实验确定的定子线圈外半径r2为19.5mm,高度h2为34mm,实际支座上的定子线圈安装孔留有一定的裕度,设计为40mm。16个定子线圈的位置根据上述的定子极中心轴线在单位球上的坐标计算确定。实际的定子线圈如图4所示,应用时可在其中间插入铁芯,增强其磁性。
定子由与转子同球心的球冠、空心圆柱台和8个轴承合并而成。球冠用以内嵌固定16个定子线圈,其特点是覆盖范围小于半个转子球面,其外半径R3为175mm,内半径R4为165mm。计算得空心圆柱台外半径R5为166.9394mm,内半径R6为156.4249mm,厚度d为10.51mm,圆柱台的高度H为400mm。8个小轴承用以支撑转子球,5mm的气隙是靠小轴承来实现的,因此其外形为底部圆心沿转子球半径方向的厚度为5mm的小圆柱体,其圆柱半径为10mm。小轴承圆柱体的上底和下底圆心坐标见下表1。实际设计时,可根据情况在保证气隙为5mm的基础上加长小圆柱体的厚度。定子支座的实际效果图如图8所示。
永磁球形步进电机的CAD模型整体效果如下图9所示。
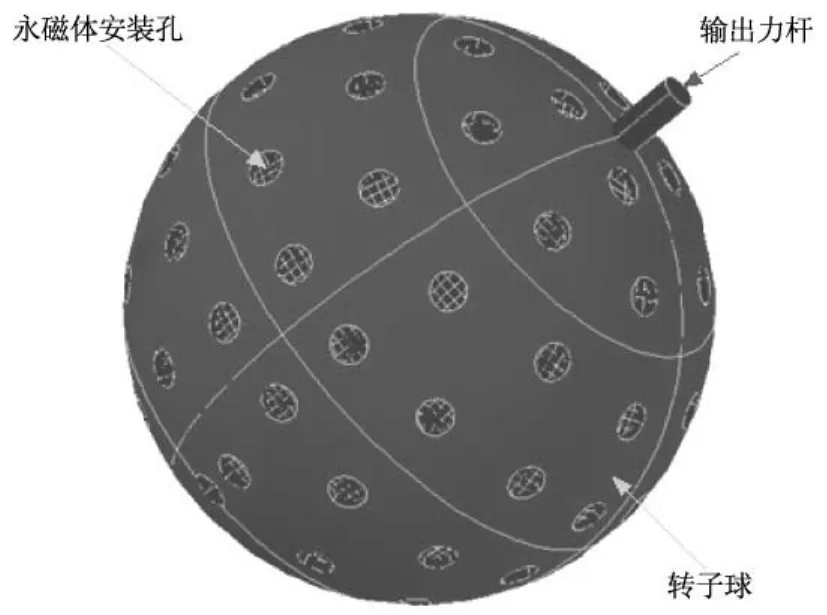
图7 转子球CAD模型立体图
5 结束语
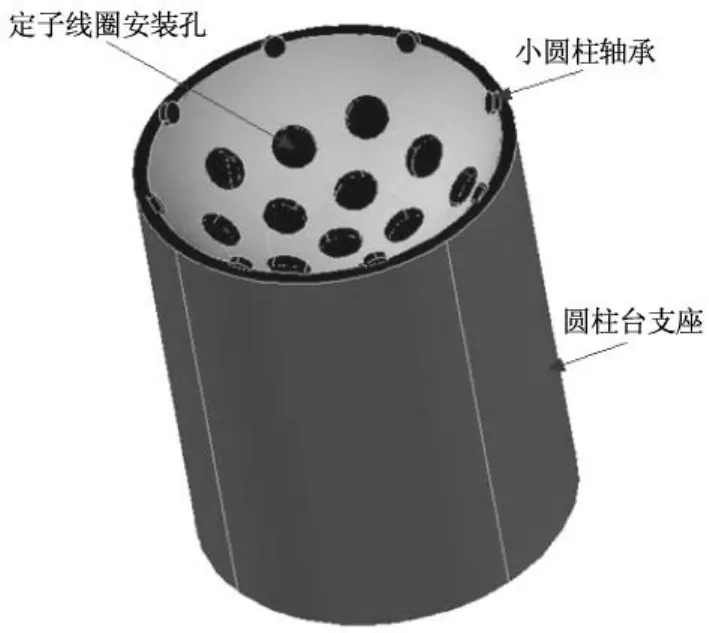
图8 定子支座CAD模型立体图
本文主要介绍了美国 hopkins大学Gregory S.Chirikjian 等 人提出的永磁球形步进电机的结构,在此基础上经过参数计算与研究,设计出了该永磁球形步进电机的实际结构,制造出了永磁球形步进电机的样机,但样机还存在气隙较大等缺陷,通过在该电机的实验平台上进行控制实验,以及对该电机的电磁场和转矩分析,对电机作进一步的优化处理,不断完善电机结构,改进和提高电机材料和制造工艺水平,改进控制策略。另外电机的位置检测装置是永磁球形步进电机的重要组成部分,它是由黑白双色喷涂的转子球和光电传感器构成的非接触式位置检测系统,通过转子位置的检测,从而来确定定子线圈的通电策略,以拖动转子作任意的空间运动,这将在电机的进一步研究中进行完善。

表1 小圆柱体轴承的上底和下底圆心坐标(单位:mm)
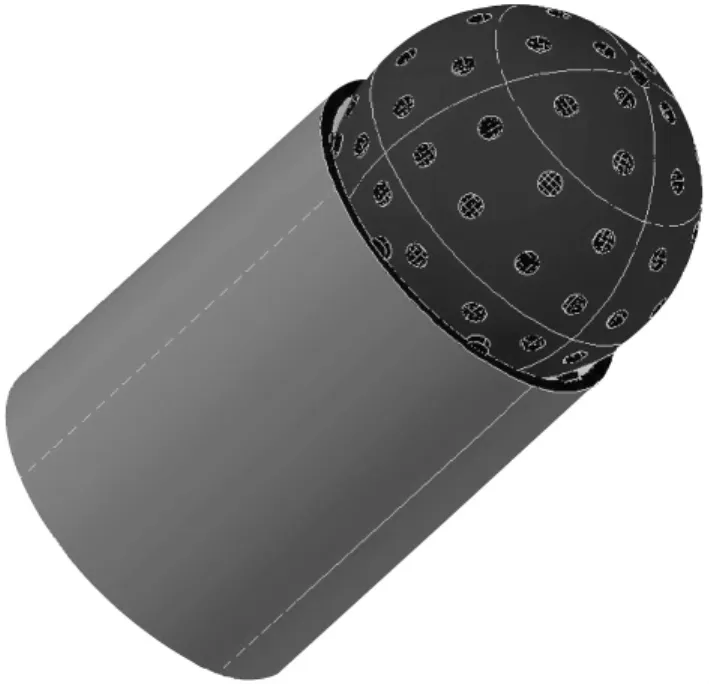
图9 球形电机的整体效果立体图
[1]Kok-Meng Lee,Chikong Kwan.Design concept development of a spherical wrist stepper motor for robotic applications[J].IEEE Transactions on Robotics and Automation,1991,7(1):175 ~ 181.
[2]K.Kahlen and R.W.De Doncker.Current Regulators for Multi-Phase Permanent Magnet Spherical Machines[C].Proceedings of IEEE International Conference on Industry Applications, 2000,3:2011 ~2016.
[3]Gregory S.Chinkjian and David Stein.Kinematic Design and Commutation of a Spherical Stepper Motor[J].IEEE/ASME Transactions on Mechatronics,1999.4(4):342 ~ 353.
[4]黄声华.三维电动机及其控制系统[M].武汉:华中科技大学出版杜,1998.
[5]苏仲飞,荆昌旭.机器人关节用三自由球形直流饲服电机[J].高技术通讯,1994(8):16~18.
[6]David Stein.Designof a Spherical Stepper Motor System[D].Johns Hopkins University Ph.D.dissertation,Baltimoer,USA,August 2001.
[7]夏鲲.新型仿人机器人关节用永磁球形进电机控制算法及驱动器研究[D].合肥工业大学,2007.
[8]李争.仿人机器人关节用永磁球形步进电动机的基础研究[D].合肥工业大学,2007.
猜你喜欢
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
微特电机(2021年1期)2021-01-25
防爆电机(2020年6期)2020-12-14
仪表技术与传感器(2020年5期)2020-06-11
测控技术(2018年2期)2018-12-09
电工技术学报(2015年6期)2015-11-15
电机与控制应用(2015年10期)2015-03-01
电力工程技术(2014年1期)2014-03-20
组合机床与自动化加工技术(2014年12期)2014-03-01
