
北京市CORS网基准站数据处理与精度分析
2010-08-29 01:39:12董绪荣戴连君聂志峰
全球定位系统 2010年5期
郑 坤,董绪荣,戴连君,张 晰,聂志峰
(1.装备指挥技术学院,北京 101416;2.北京市政务网络管理中心,北京100053)
0 引 言
基准站坐标及其稳定性是一切"连续运行全球卫星定位综合服务系统"的基础,因此应用基准站长期连续观测的GPS数据,按照相关的理论、方法及其软件进行数据处理,研究分析CORS基准站坐标变化的规律,统计分析各基准站坐标和速度场的精度及其变化,探讨基准站的位移和沉降规律。
北京市全球卫星定位综合服务系统于2006年6月通过专家鉴定验收,同期投入使用,作为北京市基础建设应用平台之一,是北京市城市坐标框架骨干网的重要组成部分,可提供多种GPS和气象数据,为北京市各应用部门和单位提供高精度位置服务,包括高精度定位、形变监控、地面沉降监控、气象预报、城市基础测绘、车辆导航等。
北京市全球卫星定位综合服务系统包含15个连续运行基准站和1个中心站,在全市范围内均匀分设,在北京市气象局、北京市地震局和北京市测绘院建立了3个分系统,采用光纤通讯、ADSL通讯和政务外网通讯等多种网络通讯模式。基准站主要负责GPS数据和气象数据的采集,将其实时传输到中心站,由中心站进行解算并以实时和后处理两种模式进行分发。目前共有14个站正常运转。基准站点位地理位置分布如图1所示。
利用这些站24 h不间断观测的载波相位数据与国际IGS站网同步联测数据进行事后精密处理,可以计算出这些站点ITRF框架下的地心坐标值,并分析其变化规律,因此联测数据的处理方法和处理策略及其精度非常重要。
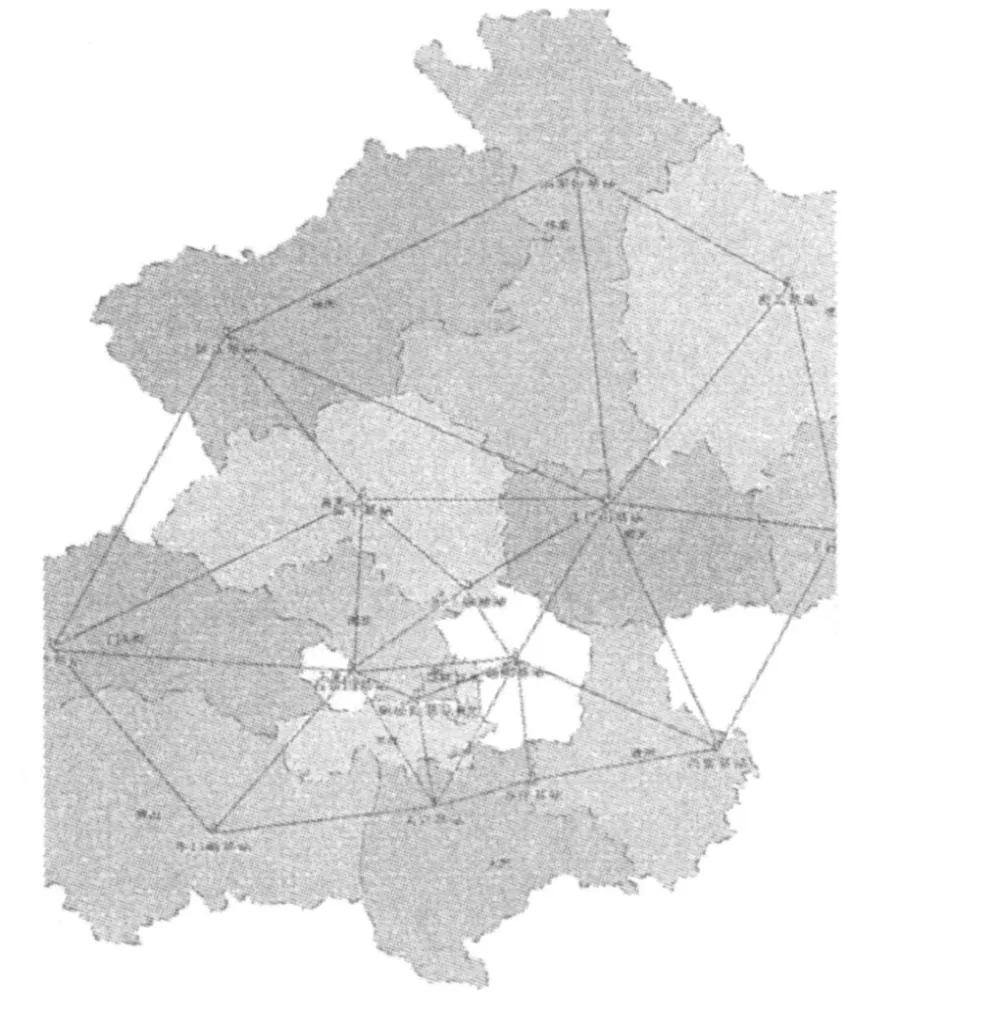
图1 基准站点网图
1 基准站联测数据处理方法
计算处理的基准站数据是北京市CORS网内14个基准站于2009年2月29日至2010年3月31日的双频GPS观测数据,14个基准台站包括:石景山(SHIJ)、大兴(DAXN)、朝阳(CHAO)、东三旗(DSQI)、延庆(YANQ)、牛口峪(NKYU)、牛栏山(NLSH)、昌平(CHPN)、测绘院(CEHY)、西集(XIJI)、汤河口(THKO)、平谷(PING)、密云(MYUN)、斋堂(ZHAI)。这些基准站都是24 h连续观测,15 s的采样间隔,接收机类型大都是T R5700。为获得ITRF框架下的结果,在分布尽量均匀的前提下,引入 WUHN,USUD,BJFS,KIT3,KUNM,PIMO,SHAO,IRKT,POL2,TSKB,DAEJ 11个国际IGS站点参与解算。
CORS网基准站观测数据由北京市政务网络中心提供,采用Rinex格式。对于非Rinex格式的数据,可以通过随机软件转换为Rinex格式。IGS站点观测数据和sp3格式的精密星历(或者g文件)可到相关网站下载。
数据处理采用GAMIT/GLOBK软件,该软件是美国麻省理工学院(MIT)研制的﹑集GPS定位定轨于一体的高精度GPS数据处理和分析软件,是目前国际上著名的GPS定位定轨软件之一。随着LINUX系统的广泛普及,标准的GAMIT版本已很容易移植到微机上使用。GAMIT/GLOBK对于GPS观测数据的处理是通过GAMIT与GLOBK两个模块分别完成。GAMIT模块主要进行基线解算,生成单天解h文件等。GLOBK模块实现滤波与平差计算、完成对h文件的后处理。本文所使用的是GAMIT 10.34版本。
1.1 相关文件的准备和设置
1)检查tables内文件。Tables内最少应包含的文件有:Pole.;ut1.;luntab.;soltab.;leap.sec;gdetic.dat;antmod.dat;svnac.dat;rcvant.dat;station.info;sestbl.;sittbl.;svs_exclude.info;ITRFyy.apr;otl.grid。以上文件可在GAMIT的tables里面找到,但需保持更新。
2)手动修改L文件lfile、station.info、sittbl.。L文件是包含所用测站的概略坐标的文件,该文件可以在GAMIT安装目录下的lfile的基础上手工填写,对于不知道初始坐标的观测站,可以通过sh_rx2apr命令来获得。station.info文件包含接收机、天线和天线罩类型等信息。可根据观测站所用GPS,对照格式填写。sittbl.文件用于解算过程中某些站点的先验坐标给出约束。
3)如果要进行海潮校正或大气负荷(ATML)校正,还需要下载相应的文件并置于tables目录下。GAMIT/GLOBK vl0.34版缺省采用FES2004海潮模型,此外还有 CSR4、GOT00、FES99、NAO99b 等多种模型可供选择。采用何种模型通过设定到otl.grid的链接来进行。ATML数据为分年数据,如atmdisp_cm.2006。如果大气映射函数(Mapping Function)采用由数值天气预报而得的VMF1,则还需要下载全球分年VMF1栅格文件(如vmflgrd.2007)。
1.2 数据处理参数选择
处理参数设置如下:
处理模式 RELAX;
观测值的选择LC_AUTCLN;
批处理迭代方案1-ITER;
潮汐模型IERS03;
光压模型BERNE;
数据筛选AUTCLN;
ARC参考系统IGS05;
惯性框架J2000;
IGS站坐标约束0.01 0.01 0.05;
CORS网基准站坐标约束100 100 100。
1.3 数据处理策略
IGS站点的选取,关系到解算的精度。CORS网的解算分为全球网解和区域网解,区域网解反映相对于中国大陆周边及内部IGS跟踪站的坐标精度,全球网解反映相对于坐标框架的地心坐标精度,两者之间的地心绝对精度存在一定的差异。区域网从坐标内符合精度上来讲要略优于全球网。
对于基准站的分析,首先可以使用程序glred或sh_glred做出基准站坐标的时间序列,找出并剔除任何测量或基准站有明显异常值。对于全球解,在glorg程序中固定比较好的IGS站点作为约束。对于区域解,由于IGS站较少,为获得较好的时间序列,一般采用迭代过程,首先利用IGS站确定框架生成时间序列(利用GLRED),然后剔除明显的异常值,再利用(GLOBK)联合解算出各个点的坐标,最后再运行GLRED,在glorg程序中使用所有的点作为约束点,这样可以有效定义一个区域参考框架,可以在不选择单一参考站消除共模误差,本文中采用的是区域网解。
2 解算结果的精度分析
一般用来评价GAMIT相位数据处理有三条重要的准则:
1)预期的数据全部参与处理;
2)模型拟合达到预期水平;
3)相关的误差指标在允许的范围内。
通常,可以通过gamit的总结文件(sh_gamit_ddd.summary)以及 sh_glred给出的坐标重复率(wrms)指标来判定数据处理是否满足上面的三个准则。
在sh_gamit_ddd.summary文件中需要注意的是:
1)参与数据处理的站点是否与预期的数目一致;
2)AUTCLN RMS(均方根差)3~6 mm;
3)没有站点RMS(均方根)=0;
4)SOLVE Postfit nrms 0~0.2;
5)模糊度解算>80%(2001年起)。
当观测时间为24 h并强约束时,水平方向的重复率约在1~2 mm,高程方向的重复率约为3~5 mm。当观测时间为8 h,水平方向重复率约为2~4 mm,高程方向约为10~15 mm。对于连续运行的CORS基准站,其水平重复率应在1~2 mm,高程重复率在3~5 mm。如果是个别站的坐标重复率的数值较大,检查观测测回时间长度,以及autlcn.post.sum文件中是否有数据被删除或者噪声误差较大(autlcn.post.sum文件中的 RMS表以及仰角和q文件中的先验接收机建模误差)。如果是所有站点的基线重复率的值偏大,检查glred以及glorg运行的记录文件,查看最后用来固定的IGS站的数目,各个站的改正数,以及Post RMS的值(1~5 mm)等。图2是2009年 2月29日到2010年3月31日CHAO站的坐标时间序列图,N方向wrms为1.9 mm;E方向wrms=1.8 mm;U方向wrms=5.0 mm。
根据2009年2月29日到2010年3月31日之间北京市CORS的联测数据,先生成坐标时间序列,剔除异常值。北京市CORS网各基准站运行较好,总体上没有站点出现异常,但某些站个别天出现异常值,直接剔除,具体有待进一步分析。表1是基准站坐标解算重复率统计表。
图3为基准站速度场及速度场残差离散度,其中矢量标志表示速度场方向及大小,圆的半径表示离散度。从图中我们可以初步分析得到基准站速度场方向比较一致,速度场离散度较好。但密云站除外,密云站速度场离散度较大,经分析是由于密云站观测数据量过少所致,表2是基准站速度场和离散度统计表。
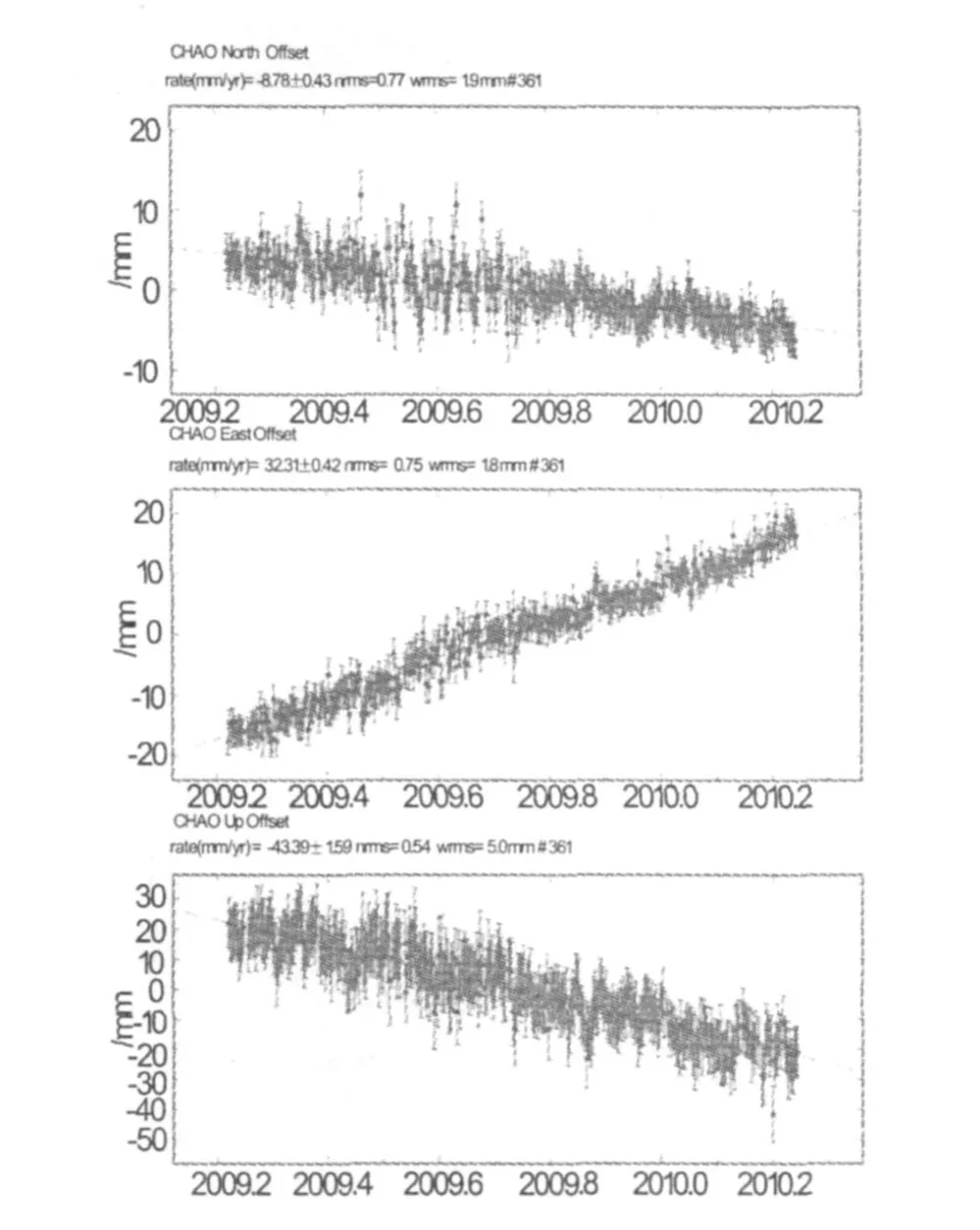
图2 CHAO站坐标时间序列图

表1 基准站坐标重复率统计图
短期变化反映的是GPS观测的误差;长期变化趋势主要反映了板块运动的影响;大多数基准站的位置变化趋势呈现明显的规律趋势—基本为线性变化,基准站运行稳定。

图3 基准站的速度场
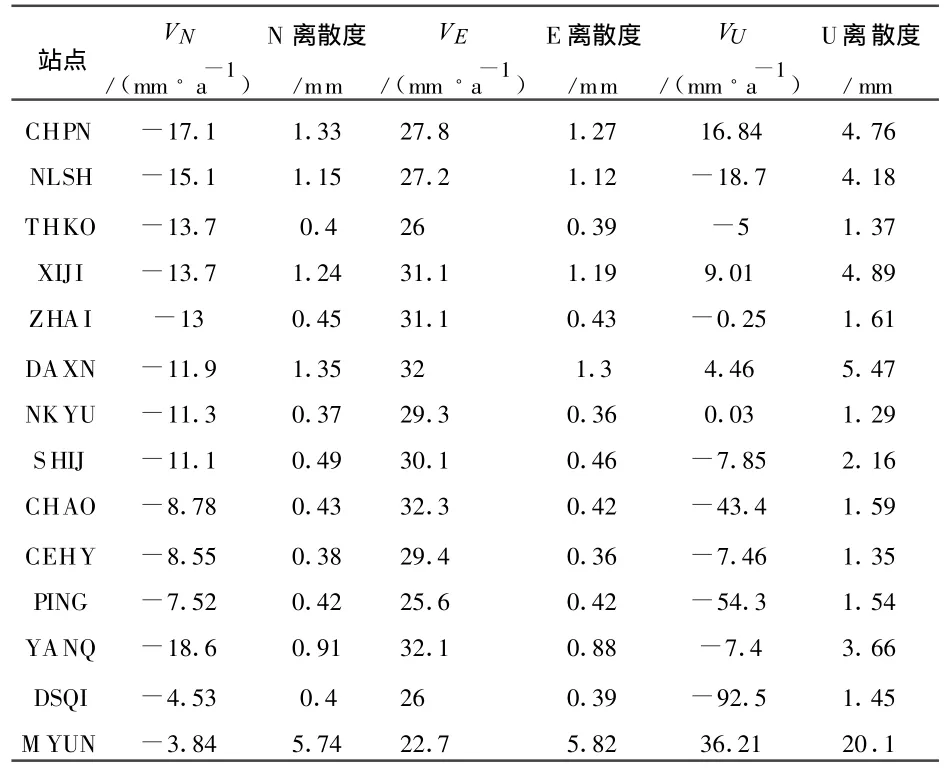
表2 基准站速度场及离散度统计表
3 结 论
介绍了CORS网基准站的数据处理与精度分析,并结合北京CORS网进行了实践。结果表明N,E方向精度优于2 mm,高程方向精度优于5 mm,坐标变化趋势基本为线性变化,基准站运行稳定。实践表明应用GAMIT对CORS网基准站联测数据处理:无论是在模型参数选择,IGS站选取,数据解算策略选取都直接影响到解算结果的精度。GAMIT是一个大型的GPS处理软件,在对CORS网数据处理中,还可能遇到各种各样的问题,还需要不断在实践中摸索和总结。
致谢:感谢麻省理工学院提供GAMIT软件和麻省理工学院的Bob King博士的帮助和指导及秘金钟博士、易长荣老师的帮助和指导。
[1]Document for GAMIT GPS Analysis Software Release10.3[M].Massachusetts Institute of Technology,Scripps Institution of Oceanography University of California at San Diego,2006(2):29-33
[2]秘金钟,蒋志浩,张 鹏,党玉民.IGS跟踪站与国内跟踪站联合处理的框架点选择研究[J].武汉大学学报.信息科学版,2007,32(8):704-706.
[3]秘金钟,李毓麟,张 鹏,等.GPS基准站坐标与速度场精度及随时间变化规律的探讨[J].武汉大学学报.信息科学版,2004,29(9):763-767.
猜你喜欢
心理学报(2022年4期)2022-04-12 07:38:02
水泵技术(2021年3期)2021-08-14 02:09:20
电子制作(2019年14期)2019-08-20 05:43:42
国际呼吸杂志(2019年1期)2019-01-28 09:37:02
中国自行车(2017年1期)2017-04-16 02:53:52
故事会(2016年21期)2016-11-10 21:15:15
公民与法治(2016年19期)2016-05-17 04:18:15
中国惯性技术学报(2015年1期)2015-12-19 13:12:17
读者·校园版(2015年7期)2015-05-14 13:11:40
河南科技(2014年15期)2014-02-27 14:12:35
