
基于FPGA的相关干涉仪算法的研究与实现
2010-08-12 12:05韩广王斌王大磊
电子技术应用 2010年7期
韩广,王斌,王大磊
(信息工程大学信息工程学院,河南郑州450002)
相关干涉仪测向具有算法简单、精度高、适用天线阵形式多样等优点,被广泛应用于军用和民用的无源测向系统中。传统的相关干涉仪测向系统一般采用DSP实现,这在系统带宽不高、实时处理要求不强的场合是适用的。但是随着跳频、突发和扩频技术的不断应用,尤其是在跳频频率覆盖范围越来越宽的情况下,对测向机的处理带宽和处理速度提出了更高的要求,因此,单纯使用DSP实现测向系统,很难达到设计要求。
本文从测向系统实现的角度出发,对宽带相关干涉仪快速测向算法进行了一些研究,并根据实际设计要求,给出了一种基于FPGA的算法实现方案。
1 相关干涉仪测向理论基础
1.1 阵列输出数学模型
图1是一个按照任意位置排列的天线阵,共有M个阵元,每个阵元的坐标分别为(x1,y1),(x2,y2)……(xM,yM)。

假设窄带远场信号s(t)的来波方向为(θ,φ)(θ为信号来向与X轴正方向之间的夹角,φ为信号来向与XOY平面的夹角),信号中心频率为fo。因为假设信号为远场信号,所以其波阵面可以近似为平面。以坐标原点O为参考点,第K个阵元输出可以表示为:


因为假设信号为窄带信号,所以式(1)可表示成如下形式[1]:

则M个阵元的接收信号可以表示成如下向量形式:

式中:X(t)=[x1(t),x2(t),…,xM(t)]T为阵列输出矢量;
N(t)=[n1(t),n2(t),…,nM(t)]T为阵列加性噪声矢量;
A(Θ)=[g1exp(-j2πfoτ1),g2exp(-j2πfoτ2),…,
gMexp(-j2πfoτM)]T为阵列方向矢量。
1.2 相关干涉仪测向原理
干涉仪测向的实质,就是利用无线电波在接收天线阵的不同阵元上形成的相位差来确定源信号的方向。相关干涉仪,既然也称为“干涉仪”,当然也是利用天线阵获取的入射波相位分布来测向的。而所谓“相关”,其含义是“比较”,即通过比较入射波相位分布与事先已存储的各方位、各频率来波相位分布的相似性,而最终得到入射波方向的估计的[2]。
相关干涉仪主要应用于圆阵。下面以五元均匀圆阵为例,说明相关干涉仪测向的基本原理。图2为一个五元均匀圆阵,其阵元的坐标分别为(x1,y1),(x2,y2)……(x5,y5)。
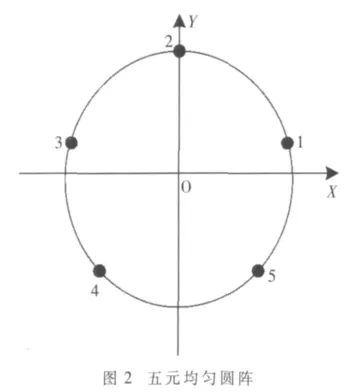
假设窄带远场信号s(t)的来向方位角为θ,仰角为0°,信号频率为fo,以坐标原点O为参考点,可以得到一个相位差值矢量Φ=[φ1,φ2,…φ5]T,其中φk(k=1,2,…,5)为第k个阵元测得的入射信号相对于参考点O的相位差。
在360°范围内,等间隔选取若干个方位角θi(i=1,2,…,n),对应于每一个θi,都可以求出一个相位差值矢量Ψi=[Ψ1i,Ψ2i,…Ψ5i]T与之对应,把这些相位差值矢量称为相关干涉仪的原始相位样本。将实际测得的相位差值与原始相位样本逐一进行相关处理,计算出它们的相关系数,相关系数最大值所对应的方位角θi,即为来波方向的估计[3]。
计算相关系数的公式如下[4]:

从上述讨论不难看出,当选取的方位角间隔越小,也就是方位角选取的越密,测向精度就越高,相应的系统运算量也就越大。由于系统的测向精度和运算量之间存在着矛盾,因此要综合考虑系统的运算资源和要求的测向精度之间的关系,在系统运算资源允许的情况下,尽可能地提高测向精度。
2 设计实现
2.1 原始样本的选取
为了使相关干涉仪测向算法更适于FPGA实现,这里改变一下原始样本的选取,仍以五元均匀圆阵为例,如图2所示,假设窄带远场信号s(t)的来向方位角为θ,仰角为0°,信号频率为fo,以坐标原点O为参考点,可以得到一个阵列输出矢量X(t)=[x1(t),x2(t),…x5(t)]T,对接收到的阵列输出矢量X(t)进行Fourier变换,得到阵列输出频域矢量X(f)=[X1(f),X2(f),…X5(f)]T,由式(2)推出:
Xk(f)=gkS(f)×exp(-j2πfoτk)+Nk(f),k=1,2,…5(5)
由式(5)可以看出,阵列输出频域矢量X(f)中包含了信号的来向信息τk,因此可以按照与传统相关干涉仪类似的方法,在360°范围内,等间隔选取若干个方位角θi(i=1,2,…,n),每一个θi通过式(5)都可以求出一组阵列输出频域矢量Xi(f)。若以Xi(f)(i=1,2,…,n)为原始样本与实际测得的阵列输出频域矢量X(f)进行相关运算,所得相关系数最大值所对应的方位角θi应为信号来向的估计。
进一步分析可以看出,在式(5)中,若Nk(f)为噪声频谱,则Nk(f)与gkS(f)×exp(-j2πfoτk)的相关系数为0;而对于频率固定的来向信号而言,在进行相关运算时,S(f)可视为常数,由此可把样本矢量简化为[g1×exp(-j2πfoτ1),g2×exp(-j2πfoτ2),…,gM×exp(-j2πfoτM)]T的形式,这正是阵列的方向矢量A(Θ)。根据上述讨论,以阵列方向矢量A(Θ)作为系统的原始样本与测得的阵列输出频域矢量X(f)进行相关运算,相关系数最大值所对应的方向值即为信号的实际来向。
2.2 仿真验证
利用Matlab仿真,比较改进样本选取方法与传统样本选取方法的测向性能。
仿真条件:天线阵采用半径为15 m的五元均匀圆阵,阵元坐标分别为(14.3,4.6)、(0,15)、(-14.3,4.6)、(-8.8,-12.1)、(8.8,-12.1)(单位为m)。源信号为调制指数2.5、载波频率20 MHz、频偏10 kHz的FM信号。采样点数为1 024点,采样频率为80 MHz。假设各天线的噪声为独立、同分布的高斯白噪声。天线幅度差为3 dB,相位差为30°。当信噪比在[0 dB,20 dB]之间变化时,分别对传统样本选取法和改进的样本选取法做200次Monte-carlo试验,得到的均方误差曲线如图3所示。

从仿真结果可以看出,两种样本选取方法的测向性能相似,这与上述讨论所得出的结论是一致的。
由此可知,选用改进的样本选取方法进行相关干涉仪测向不会带来测向性能的损失,通过适当选取相关运算的原始样本,省去了对来向信号相位差值求解的步骤,简化了整个测向系统的设计和运算流程,节省了FPGA内部资源的使用,有利于相关干涉仪测向算法在FPGA上的实现。
2.3 测向系统简介
测向系统结构如图4所示,天线阵采用五元均匀圆阵,每个阵元均为全向天线。

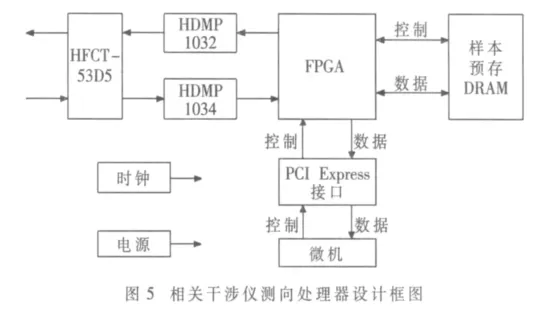
相关干涉仪测向处理器为整个测向系统的核心部分,负责完成接收信号的快速测向。相关干涉仪测向处理器的设计框图如图5所示,其中HFCT-53D5为一个光纤数据收发芯片,主要负责光纤数据的接收和发送;HDMP1032和HDMP1034组成一对串并转换单元,完成光纤数据和FPGA数据间的串并转换;FPGA后端是一个样本预存DRAM,用来存储样本数据以供FPGA调用;而FPGA与微机间的数据交换可以采用光纤传输模式或PCI Express接口来完成。
2.4 相关干涉仪测向算法的FPGA实现
相关干涉仪测向算法全部由相关干涉仪测向处理器中的FPGA完成。下面对算法的实现流程作详细介绍,并给出一种利用FPGA实现相关干涉仪测向算法的设计方案。
2.4.1 FPGA内部模块划分
根据相关干涉仪测向处理器的结构和相关干涉仪测向算法的特点,可将FPGA划分为5个功能模块。FPGA外接的DRAM主要用来存储方向矢量数据,其算法实现示意图如图6所示。

(1)数据帧处理模块
数据帧处理模块的任务就是从HDMP1034传输过来的数据中识别出数据帧,并将其正确接收。在接收的过程中,将复用的数据分发到各通道对应的存储器中,以备下一步FFT变换使用。
(2)接收数据存储模块
接收数据存储模块的作用是将数据帧处理模块分发下来的数据分别存进各通道对应的RAM中,此时的存储时钟即为前端数据传输时钟。当存储数据个数达到FFT变换所需的采样点数时,各通道的RAM同时以高时钟速率将数据传输给FFT变换模块,并为下一次FFT变换存储新的数据。
(3)FFT变换模块
FFT变换模块主要完成数据由时域到频域的快速Fourier变换。
(4)FIFO
FIFO模块用来缓存FFT变换模块的输出数据,以备相关处理模块调用。
(5)相关处理模块
相关处理模块的任务是完成信号与样本之间的相关运算,并同时找出相关系数最大值,确定信号来向。当信号完成时频转换后,相关处理模块分别从FIFO和DRAM中调用数据,根据相关运算公式对信号与样本进行相关处理,求出其相关系数,同时比较出相关系数最大值,确定出各频率点上信号的来向。
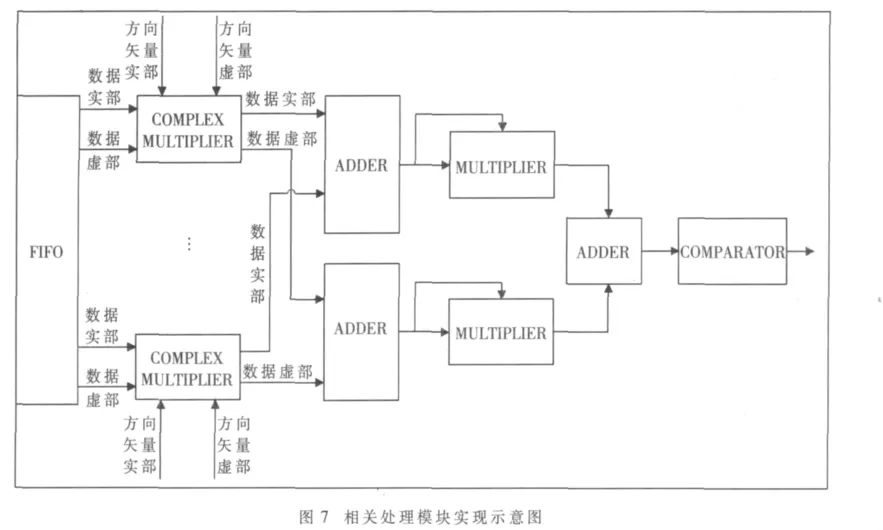
2.4.2 相关处理模块
根据相关运算公式,给出一种相关运算模块的实现方案,其结构示意图如图7所示。为了减少运算量,节约FPGA内部运算单元的使用,这里并没有严格按照相关系数公式(4)进行运算,而是只计算了式(4)的上半部分,即2个向量的复乘。由于这里相关运算的目的只是为了比较各相关系数的大小,找出最大值,确定来波方向,所以可省去相关运算中“归一化”这个步骤,只比较原始样本与测得的阵列输出频域矢量X(f)的复乘结果即可。
2.4.3 芯片选择与相关处理模块的实现
本文采用单片FPGA的实现模式,FPGA芯片选用Xilinx公司生产的Virtex5中的SXT系列芯片,其内部集成了PCI Express接口的IP硬核,特别适于本系统的设计实现[8],且Xilinx公司在其开发工具ISE中提供很多免费IP核,如FFT变换、复乘、累加等,这也为系统设计提供了很多方便。
采用单片FPGA模式实现的测向处理器,其工作流程如图8所示。

为了充分发挥FPGA的优势,提高处理速度,这里采用全并行工作方式,即5个通道的数据在FPGA内部采用同步并行处理的模式进行处理,这是任何一种类型的单片DSP所无法做到的。由此可以清楚地看出,FPGA在低复杂度、大运算量算法实现方面的优势相当明显。
2.4.4 原有DSP实现方式与FPGA实现方式性能比较
原有的采用DSP和微机来实现的相关干涉仪,完成一个带宽3 kHz的窄带信号的计算一般需要上百微秒的处理时间[5],而在短波频段,一个普通的跳频信号的带宽就可以达到700 kHz,跳数可达500跳/s,而对于某些跳频信号其带宽与跳数可以达到更高。如果要求对这样的信号进行实时测向,这对只能进行串行处理的DSP而言,相当困难。本文介绍的实现方案,不同于过去逐个频点求解的模式,而是充分发挥FPGA并行处理的优势,可对测向频带内多个频点同时测向,就700 kHz的测向频带来说,可将处理时间控制在1 ms以内,这样就可以实现对带宽700 kHz、跳数500~1000跳/s的跳频信号的实时测向。如果想对跳数更高、频带更宽的跳频信号进行测向,则可采用多片FPGA并行处理的方式来实现。
[1]李淳,廖桂生,李艳斌.改进的相关干涉仪测向处理方法[J].西安:西安电子科技大学学报(自然科学版),2006,33(3):400-403.
[2]严发.浅谈相关干涉仪测向机的设计思想[J].中国无线电管理,2003(7):68-69.
[3]刘芬,明望,陶松.相关处理在干涉仪测向中的应用[J].电子科学技术译论,2005,(6):31-33.
[4]肖秀丽.干涉仪测向原理[J].中国无线电,2006,(5):43-49.
[5]田耘,徐文波,胡彬.Xilinx ISE Design Suite 10.x FPGA开发指南[M].北京:人民邮电出版社.2008.
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
九江学院学报(自然科学版)(2022年2期)2022-07-02
计测技术(2020年6期)2020-06-09
空间科学学报(2020年4期)2020-04-22
航天电子对抗(2019年4期)2019-06-02
雷达学报(2018年3期)2018-07-18
制导与引信(2017年3期)2017-11-02
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
火控雷达技术(2016年1期)2016-02-06
河南科技(2015年18期)2015-11-25
