
电力推进船舶负载管理技术研究
2010-08-10 02:56武沁夏立王黎明
船电技术 2010年10期
武沁 夏立 王黎明
(海军工程大学电气与信息工程学院,武汉 430033)
1 引言
全电力推进是将推进用电和其他负载用电集中生产统一分配的新兴技术,它能产生几十甚至上百兆瓦级容量的电能,在满足推进用电的同时,也为其他大功率负载的使用奠定了基础。与陆地电网不同,船舶电力系统容量有限,众多大功率负载的使用可能导致系统过载崩溃,为了防止出现此类问题,并在负载之间灵活调度电能,需要在系统的层面上统一管理负载。
2 负载管理的必要性
传统的船舶电力系统不包括推进电机,单个负载的额定功率都在5到500 kW之间,该工况下所有有可能使用到的负载的额定功率总和一般不超过电站总在线功率的80%,所以传统船舶几乎不需要集中式的负载管理。
全电力推进系统由发电、配电、变电和推进等模块组成,能量管理模块对整个系统进行统筹控制[1]。与传统船舶不同,除了一般的日常负载外,电力推进船舶还包括电力推进等大功率负载,下面对这些负载的能量需求作简要的分析。
推进电机是电力推进系统最重要的负载,船舶全速前进时推进负载所用功率约占全部用电负荷的70%~80%。美国DD(X)全电力驱逐舰预计总装机功率110 MW,推进总功率73 MW,占总装机功率的66.4%[2]。英国的CVF全电力推进航母预计总装机功率110 MW,推进总功率86 MW,占总装机功率的78.2%[3]。
近些年来,船舶上的各种装备逐渐从液压、气动和机械形式过渡到电磁和全电控制形式[4]。在海上钻进平台或需要动态定位的船舶中,除了主要的推进系统外,还需要用来动态定位的侧推系统,侧推功率约为主推的45%左右。此外近年来出现的新型雷达等探测设备运行功率也都在兆瓦以上[5]。
电力推进系统的发电机组容量大,燃气轮机单机组容量一般都有20到50 MW,在很多工况下运行一组发电机组就能满足需求[6]。单机组运行带来的问题就是突然有大功率负载需启动时,系统可能没有足够的剩余在线功率,重新启动发电机组需要一定的时延,这将影响船舶的性能。
文献[7]对大功率负载直接启动造成系统过载进行了仿真研究。当负载忽然从1.3 MW跳变到23 MW时,导致两发电机组失去同步,系统崩溃。储能模块若在此时向电网注入30 MW的功率,能有效抑制这一冲击。
由上述可知,由于电力推进系统某些负载的运行功率大,与发电机组的容量具有可比性,如果不对它们进行合理的管理,就可能引起系统性能下降甚至过载崩溃,单机组运行问题也增加了过载的可能性,由此就出现了负载管理的问题。
3 负载管理的基本功能
能量管理模块对电力系统进行统一控制,负载管理是其重要功能之一。它是将电能看作一种资源,通过合理控制负载对这种资源的消费行为,保证总负荷功率在任何时候都不超过系统的设定值,即保证负载对电能的消费任何时刻都不超过一定的设定值,从而提高电力推进系统的失电保护能力和能量调度的灵活性,最终保证为负载提供可靠而充分的电能。其基本功能有以下几个方面:
1)动态优先级设定:各负载在不同工况下的重要性不同,对系统性能的影响大小也不同,所以负载的优先级随船舶的运行工况而变化,为了给负载管理提供决策依据,应该动态的设定负载的优先级。
2)重载起动询问:大功率负载若直接启动,可能造成系统过载,所以应该进行阻拦询问,当功率条件满足时,负载起动;若功率条件不满足,则需启动发电机组或卸载若干负载,从而完成负载的启动和能量的调度。
3)功率限制:在运行过程中,推进负载的功率变化很大,如在船舶全速前进时的功率就比以经济航速航行时要大的多,为了防止推进负载功率过高导致过载,功率限制功能将考虑系统的可用功率,通过控制推进变频器来限制推进功率超过设定值,直到有更多的功率余量提供为止。
4)快速卸载:当发生发电机脱扣或停机等严重故障时,系统输出功率将急剧减少,限制推进电机功率或启动发电机组都不能及时阻止系统过载,这时快速卸载功能将综合考虑负载的优先级和卸载的难易程度,快速卸掉一部分负载。
4 负载管理的控制结构
负载管理是对各个负载进行系统级的统筹控制,只发调度指令,不涉及对电气设备的具体控制,设计其控制结构时,需要充分分析负载管理功能与能量管理系统的其它功能以及电力系统各区域级和设备级控制功能的区别和联系,合理设计各个控制功能之间的接口,从而构建一个完整的电力推进船舶控制系统,负载管理的控制结构图如图1所示。
图1从信息交互的角度表示了负载管理的控制结构。底层的检测系统由多个同步相量测量装置构成,测量电力系统的实时数据,并通过现场总线和以太网络将数据传送给上位机中的历史数据库和实时数据库;系统分析功能根据实时数据分析计算,得出电力系统的实时状态、实时潮流和实时拓扑;系统分析功能还将实时数据库中的负载状况与历史数据对比,若有新的负载管理需求则将相关信息通知负载管理模块;负载管理模块根据得到的信息,结合目标和约束条件,根据算法计算出调度步骤,然后向能量管理系统的其它模块或电力系统区域级和设备级的控制功能输出调度命令,同时显示需操作的设备清单和步骤清单。
5 负载管理的算法
负载管理模块是由一系列的目标和算法构成的,要实现负载管理的功能,除了需要总体的负载管理目标和算法外,每一个子功能如动态优先级设定、功率限制和快速卸载等,也都需要不同的算法来实现。下面提出一种基于规则的负载管理算法,其关键步骤如下:
1)初始化:船舶可能在各种工况下运行,其能量需求是不相同的。当启动系统时,先选择要运行的工况,此工况下可能用到的负载的额定功率总和即本工况的功率分配线随之确定。若不选择则按默认的工况启动。工况确定后,根据本工况内各个负载的重要性,分工况设定负载的优先级。这些设定数值存储在数据库中,有权限的操作员可以对其进行修改。
2)启动发电机组:初始化后,负载管理模块向供电管理模块发出能量请求,后者启动合适数量的发电机组。启动运行的发电机组的额定功率总和应该比本工况可能用到的负载的额定功率总和多出一定的余量,防止有本工况之外的负载忽然连接到电网。
负载管理算法的流程见图2。
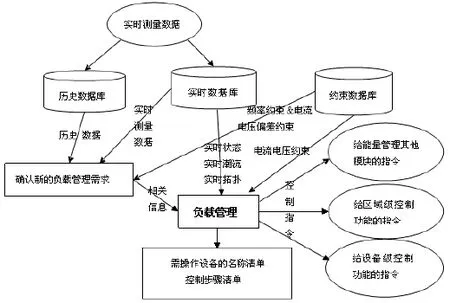
图1 负载管理的控制结构
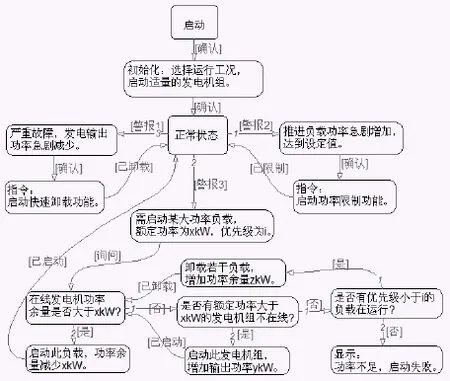
图2 负载管理算法的流程
3)警报操作:当推进电机的功率达到设定的阀值时,自动启动功率限制功能;当系统发生严重故障输出功率急剧减少时,自动启动快速卸载功能。
4)重载启动:当有额定功率大于设定值的负载需要启动时,对其进行询问。在线发电机组如果有足够的功率余量,直接起动;若余量不足,询问系统内是否有不在线的发电机组,有则启动,没有则卸载一部分优先级最低的负载;若需启动的负载优先级最低,则提示功率不足,启动失败。
6 负载管理的实现
为了验证上述控制体系结构和算法的可行性,搭建了负载管理实验平台,平台由一个小型电力系统和负载管理系统组成。电力系统的总功率为30 kW,发电机组由6组额定功率为5 kW的隔离变压器代替,负载有6台额定功率为3 kW的电动机、两组功率为10 kW的电阻负载等。负载管理系统的硬件结构与上述控制结构相同。负载管理系统的软件采用罗克韦尔公司的ControlLogix软件系统,包括集成软件开发平台RSLogix5000,其主要功能是提供一个可以把程序概念转变成一系列程序图和定义用于快速创建可执行程序的开发平台;通讯服务软件包RSLinx,它支持和许多不同网络上的多种设备同时进行通讯;人机界面软件 RSView32,这是一种易用的、可集成的、基于组件的 MMI系统,能有效地监视并控制机器和过程。负载管理模块主要用 RSView32软件的“逻辑与控制”功能和自带的VB程序编辑器来构建,部分需要快速计算的步骤由RSLogix5000来实现。
系统实时监测系统的可用功率和总负荷,当总负荷达到或超过总在线功率的85%时,系统将自动报警并执行相关动作。当有额定功率超过 3 kW 的负载需要启动时,对其进行询问,查看是否满足启动条件后执行相关动作。
图3是负载管理初始化界面,有操作权限的操作员可以在这个界面设定修改工况的功率分配线和负载优先级,选择并运行某一工况。
图4是报警汇总界面,当监视的某一参数超过设定值时,系统会报警,并在一定时间后自动执行预先设定的动作,如启动发电机组,快速卸载等,警报解除后,系统作出相应提示。

图3 负载管理初始化界面
7 结束语
电力推进船舶的负载管理是一个全新的问题,随着许多船舶设备向电气化过渡,负载管理问题会变得越来越重要。本文对该问题做了初步的探讨,设计了负载的控制结构,提出了基于规则的负载管理算法,并用实验证明了其有效性。下一步的工作应充分考虑电力推进船舶的运行特点,开发更加灵活高效的负载管理策略和算法。
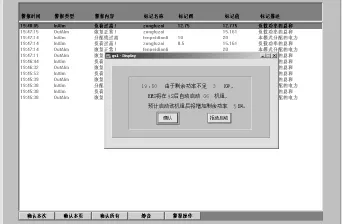
图4 负载管理警报汇总界面
:
[1]Aibert J. Tucker. Opportunities & Challenges in Ship Systems & Control at ONR[C].40thIEEE Conference on Decision & Control,December2001,http://www.usna.edu/EPNES/Challenge_Problem.htm
[2]Wu Wei, Wang Daifeng, Ari Arapotathis. Optimal Power Generation Scheduling of a Shipboard Power System[C]. IEEE, Electric Ship Technologies Symposium,2007:519-523.
[3]石艳,徐惠明编译. 21世纪综合全电力推进的航母[J].船电技术, 2005(2):04-05.
[4]Matthew C. Erickson, Trey D. Oats. The Impact on New Technologies on Shipboard Command and Control[D]. Monterey, California: Naval Postgraduate School,2003.
[5]J.J.A.Van Der Burgt, P.Van Gelder, E.Van Dijk.Pulsed Power Requirements for Future Naval Ships[J].IEEE,1999:1357-1360.
[6]王庆红.舰船综合电力系统总体概念研究的思考[J].中国船舶研究,2006,1(3):26-27.
[7]Monti, S.D'ARCO, L.Gao. Energy Storage Management as Key Issue in Control of Power Systems in Future All Electric Ships[C].IEEE,International Symposium on Power Electronics,Electrical Drives, Automation and Motion,2008:580-585.
猜你喜欢
山东冶金(2022年4期)2022-09-14
中学生数理化·中考版(2019年12期)2019-09-23
中学生数理化·中考版(2018年12期)2019-01-31
中国化肥信息(2018年3期)2018-01-30
中学生数理化·中考版(2017年12期)2017-04-18
知识经济·中国直销(2017年3期)2017-04-16
通信电源技术(2016年4期)2016-04-04
现代企业(2015年4期)2015-02-28
新疆钢铁(2015年3期)2015-02-20
环球时报(2014-08-02)2014-08-02
