一种基于无线传感器网络的煤矿安全监控系统
2010-07-17 01:37宋楠楠
食品科学技术学报 2010年2期
宋楠楠, 陈 岩
(北京工商大学 计算机与信息工程学院, 北京 100048)
1 煤矿安全监控系统发展现状
国外煤矿监控技术是20世纪60年代开始发展起来的,至今已有四代产品,基本5~10年更新一代产品,国内也先后研制开发出了一批具有世界先进水平的煤矿安全综合化和数字化网络监测管理系统[1].
现有的煤矿安全监控系统虽然达到基本可用的水平,但是也存在不足和一些问题,主要包括以下几方面. 1)采用有线网络,不仅成本高,而且安装和运行困难;2)功能只限于环境参数的检测和控制,不能获取井下作业人员的考勤情况和身体状况;3)只能测量固定地方的环境参数,有测量盲区;4)传感器位置相对固定,无法检测目标位置移动的参数;5)通信协议不完善,各厂家的接口不能很好地兼容.
因此,有线网络较难达到动态全方位监测,需要采用先进技术进行网络改造.
2 煤矿安全监控系统
本文针对现有煤矿安全监控系统的问题,并结合煤矿安全生产企业的技术要求和安全标准,提出了一种基于无线传感器网络的煤矿安全监控系统. 该系统结合了现代通信技术、计算机技术、网络技术的优势,以一种灵活、方便的无线通信方式,对煤矿井下的环境进行实时监测.
与现有煤矿安全监控系统相比,本设计的监控系统具有以下优势.
1)采用无线传感器网络,以无线的方式将传感器采集到的数据发送到井口,运行和维护起来都很简易、方便.
2)根据矿井巷道的实际情况和对矿井环境参数监测的具体需求,无线传感器网络可以采用人工的方式进行灵活的配置.
3)本系统不仅可以采集环境参数,还可以采集矿工生命体征信息.
4)在危险情况下,矿工可以启动节点的呼救功能系统进行求救.
下面给出煤矿监控系统的具体方案.
2.1 监控系统总体架构
如图1,整个安全监控系统由两个子系统,井下环境检测及数据采集子系统和井上集中智能化信息管理子系统组成. 井上集中智能化信息管理子系统不是本文研究的重点,所以下文主要介绍井下环境检测及数据采集子系统.
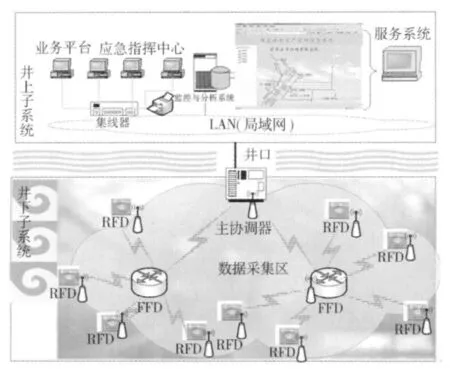
图1 安全监控系统示意Fig.1 Safety monitoring system indication
井下子系统主要由RFD(reduced-function device)传感器节点(矿工佩戴的终端便携式节点)、FFD(full-function device)节点(网关设备,矿井巷道内的固定节点)以及主协调器设备组成. 针对井下环境的实际状况,RFD主要负责矿工生理特征参数的采集,并通过无线通信的方式将数据发送到FFD. FFD由具备路由功能的节点组成,及时收集环境参数,并及时将收集到的各种数据上传到管理中心. 井下系统主要由无线网络将设备连接起来,实现可靠通信.
井上网络与井下网络通过传输接口装置实现电气上的隔离,绝对保证了井下设备的电气安全.
2.2 系统中节点的硬件设计
本系统中的节点由FFD和RFD两部分构成.
RFD结构图如图2,RFD由生命体征传感器(采集矿工生命体征信息)、微控制器模块、无线通信模块、报警模块和呼救系统以及能量管理模块组成.
在RFD的硬件设计中,加入了其他传感器节点所没有的呼救系统,在危险情况下,矿工可以使用节点的呼救系统进行求救. 另外,RFD节点采集的是矿工生命体征信息,如体温. 上述两个功能是其他无线传感器节点无法实现的.
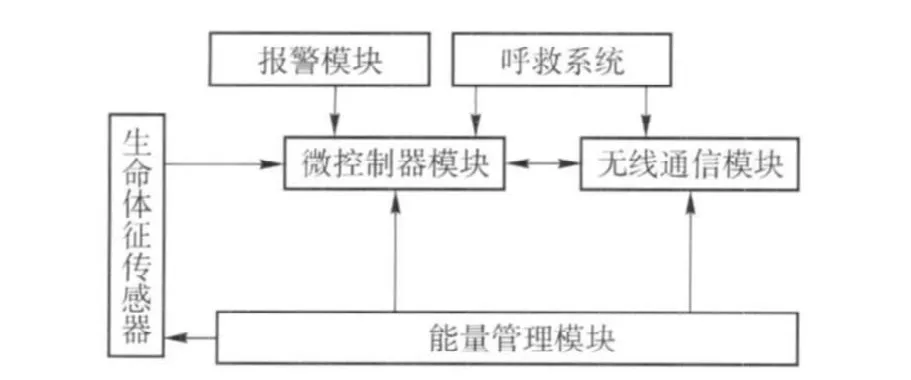
图2 RFD节点设计原理Fig.2 RFD node design schematic
FFD结构如图3,FFD由温湿度和瓦斯传感器、微控制器模块、无线通信模块、报警模块、RS232接口电路和多功能板以及能量管理模块组成.
在FFD的硬件设计中,加入了多功能板和RS232接口电路. 多功能板上载有氧气、风速、一氧化碳和二氧化碳等多种传感器,可在多种任务间进行选择和切换,用来满足不同的任务需求. 在设计中加入RS232接口电路是为了方便FFD与PC机之间的通信.
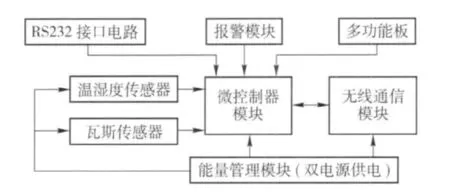
图3 FFD节点设计原理Fig.3 FFD node design schematic
无线传感器网络在应用中存在的最大问题就是能量问题,一旦节点中的电池电量耗尽,节点就将退出无线传感器网络,给工作带来巨大的不便. 为此, RFD和FFD两种节点均采用低功耗芯片,尽量减少能量的消耗. 由于FFD是固定在巷道内的,所以FFD设计中采用双电源供电. 附近有电缆的FFD可以使用固定电源供电,当切断固定电源时,FFD自动切换为电池供电.
2.3 节点的软件设计
2.3.1节点的操作系统
TinyOS是面向传感器网络的操作系统, 它采用高效的基于事件的执行方式, 使用组件模型以实现高效率的模块化、构造组件型应用软件. 支持多跳通信的传感器应用程序的组件结构[2]如图4.
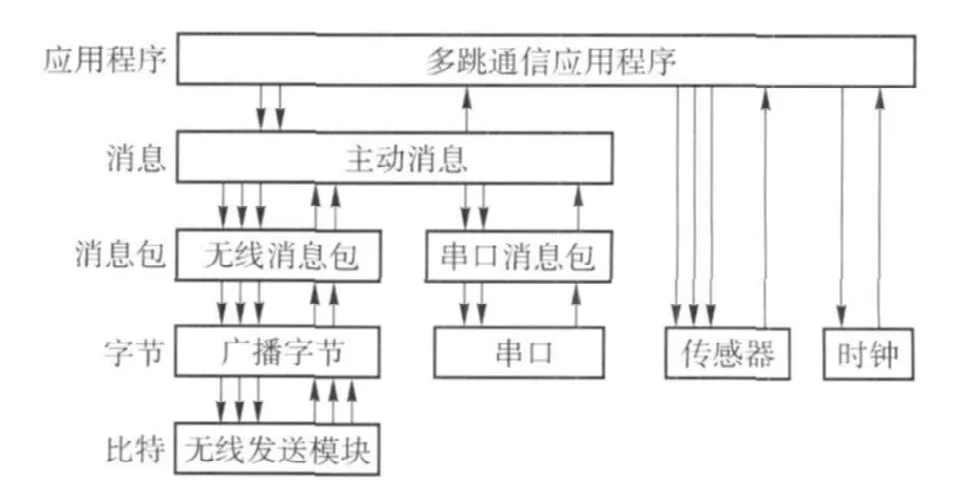
图4 应用程序的组建结构Fig.4 Structure of the application program
该系统中传感器节点采用TinyOS. 将TinyOS移植到以mega16为控制核心的硬件平台.
2.3.2系统中无线传感器网络的拓扑结构
矿井环境监测最基本的要求是及时有效地传递信息,发布预警消息,保证井下安全. 为此,本设计开发的系统中无线传感器网络采用网状拓扑结构. 完全的网状拓扑控制要消耗传感器节点较多能量,为了在满足网络连通的前提下,尽可能地节约能量,在矿井的每个工作面部署的大量节点中选取少数节点作为骨干网节点,打开其通信模块,关闭其数据采集模块,由骨干节点建立一个通信网络,非骨干节点的通信模块负责数据的路由转发. 这样既保证了原有覆盖,也在很大范围内节约了能量. 网络范围内的数据通信拓扑结构如图5.
骨干节点需要调节非骨干节点的工作,负责数据的融合和转发,能量消耗非常大. 通常由网络自身周期性地监测各节点的能量状态,并自动更换骨干节点来均衡网络中各节点的能量消耗. 选取所有节点中能量大于某一设定值的少数几个节点作为骨干节点,其余节点选取离自己距离最近的骨干节点作为自己的控制节点.
2.3.3节点定位
在定位过程中 ,要考虑以下4个关键技术. 1)网络间的区分:可以由网络 ID和频段来区分. 2)节点的标识:每个节点具有64位的永久地址,可以将其作为唯一标识. 3)定位判别:由于移动节点 RFD可由一个网络进入另一个网络,由具有路由功能的FFD节点决定其所在网格. 可以在FFD接收到RFD的通信协议包中设置信号参数,根据参数值的大小、信号的强弱确定工作人员的具体位置[3].
基于上述3个关键技术,在系统工作时,需要井下人员佩带RFD节点,该节点定时发出通信协议包,该数据包为一种握手信息,并由置于井下巷道的最近的FFD节点接收,根据通信协议包中设置的信号参数的强度判断其位置. FFD根据表驱动路由算法选择最优的通信路径,通过其他的FFD以多跳通信的方式或直接把数据包以有线的方式实时地传输到地面控制中心,从而实现集中控制管理,达到实时判知人员位置的目的.
2.3.4路由协议
路由协议是通过一定的路由选择算法进行路由选择,为RFD和FFD动态选择父节点,从而为消息传递提供一个稳定的线路. 在环境监测中,需要定期实时准确地传输监测到的数据,而节点由于有限的能量和工作环境的恶劣存在失效问题,路由协议要保证即使部分节点失效,整个系统也能正常工作[3].
目前,基于位置信息的无线传感器网路的协议主要有GPSR[4]、GAF[5]、GEAR[5]等. 本设计的系统采用的路由协议在综合这几个路由协议的基础上进行改进,以适合煤矿井下环境监控网络的需求,采用基于位置信息和网络梯度的贪婪路由算法. 位置信息由上述的节点定位算法获得,网络梯度是以信息源节点到 sink节点的跳数来度量的. 网络中节点的网络梯度越小,其优先级越高,节点向周围邻居节点中网络梯度最小(即优先级最高)的节点发送数据,当遇到相同梯度等级的节点时,综合其中位置信息和节点剩余能量等情况来决定向哪一个节点发送数据,最终数据传递到sink节点,并送到地面监控中心,实现以数据为中心的网络路由协议.
3 结 论
本文将无线传感器网络技术应用于煤矿安全监控,提出了一种基于无线传感器网络的煤矿安全监控系统. 该安全监控系统一方面可以实时监控现场的环境情况,另一方面还可以实时采集矿工生命体征信息. 另外,系统中的传感器节点还具有呼救功能,在危险情况下,矿工可以使用节点的呼救功能进行求救,从而提高了煤矿安全监控系统的安全性能. 因此,本文提出的煤矿安全监控系统非常适合于我国煤矿的安全监控需求.
猜你喜欢
小哥白尼(趣味科学)(2021年4期)2021-07-28
无线互联科技(2021年4期)2021-04-21
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
中国盐业(2018年16期)2018-12-23
网络安全和信息化(2018年3期)2018-11-07
作文通讯·高中版(2017年12期)2017-02-06
电子制作(2016年15期)2017-01-15
电信科学(2016年11期)2016-11-23
电测与仪表(2014年16期)2014-04-22