
高压带电作业自动剥皮器控制系统的研制
2010-05-18 07:28赵玉良陈凡明
网络安全与数据管理 2010年20期
赵玉良 ,戚 晖 ,陈凡明 ,李 健
(1.山东电力研究院,山东 济南 250002;2.山东鲁能智能技术有限公司,山东 菏泽250002)
为了提高带电作业的自动化水平和安全性,减轻操作人员的劳动强度和强电磁场对操作人员的人身威胁,从20世纪80年代起许多国家先后开展了带电作业机器人的研究。2002年我国也进行了高压带电作业机器人产品化样机的研制。目前带电作业所用的剥皮器是高压带电作业机器人的专用作业工具,其主要功能是剥除10 kV配电线路绝缘外皮,为完成其他作业任务做好准备[1]。目前应用的剥皮器多是手动控制,为了适应高压带电作业机器人应用的要求,本文所研究的PWM功率驱动装置的设计采用了高集成度模块,并由ATMEGA128单片机控制,具有过流、过载、过压保护功能。这种剥皮器遥操作控制系统通过遥控器进行远程控制,比手动剥皮器更加安全、可靠,操作也更加方便,满足了高压带电机器人作业任务的要求。
1 控制系统的总体设计

如图1所示,将遥控剥皮器的硬件设计分成5层,各层完成功能分别是:层1是执行结构,是机器人运动的基础;层2是驱动系统,包括电机驱动器、系统供电和电流反馈电路。由于遥控剥皮器电机的过载电流能达10 A,所以选用了具有H桥的SA60。SA60是一个PWM型功率输出芯片,电路提供给电机的电源电压最大可达到80 V,能连续向负载提供10 A的电流。最大模拟输入电压8 V,PWM载波频率可达250 kHz,而效率可以高达97%。通过12 V串行DA转换芯片控制电机的方向和速度,DISABLE引脚控制电机的上电和掉电。层3是系统接口部分,包括DA转换接口。输出电压为4 V~8 V。层 4是 ATMEGA128核心板部分,包括 JTAG、复位电路和晶振;层5是系统功能扩展板,实现与遥控器的通信。由于超再生式接收模块具有电路简单、成本低廉等优点,温度适应性强,接收灵敏度更高,而且工作稳定可靠,抗干扰能力强,所以无线接收模块选用了抗干扰能力强的超外差接收模块[2]。
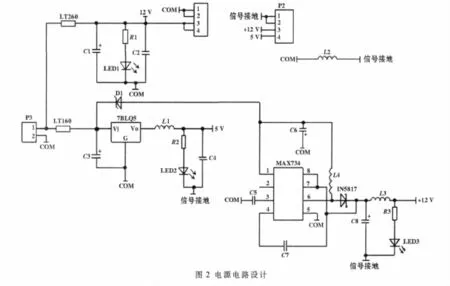
2 电源电路设计
电磁干扰必须包括3个要素,即电磁干扰源、电磁干扰传递途径及接收电磁干扰的响应者。这3个要素相当复杂,不同的场合有不同的表现。如图2所示,为了防止电机驱动电路和控制电路相互干扰,通过电感L2实现不共地。在电路排版中,由于存在地线的阻抗,因而会产生一定的电位差。由于电位差的存在,就必然给电路的工作带来影响。因此在电路板排版中,要一点接地。为了防止控制部分和电机驱动部分电路发生短路,在前序电路都加上自恢复保险丝。自恢复保险丝是一种新型高分子聚合材料制成的器件,当电流低于额定值时,它的电流电阻只有零点几欧姆。而当电流大到一定程度,它的阻值迅速升高,引起发热,而越热,阻值越大,从而阻断电源电流。剥皮器在作业过程中,由于受力不均匀,电压会被拉低,所以在电源部分加上了12 V升压芯片MAX734。由于电池充满时,电压能达14.4 V,超过了MAX734的供电电压,所以在MAX734的前端反接了一个3.3 V稳压二极管。
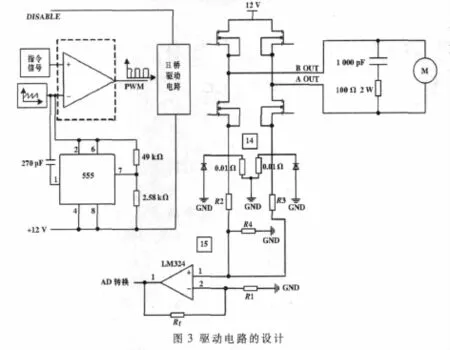
3 驱动电路的设计
PWM功率驱动装置利用大功率管的开关特性来调制直流电源,使其按固定的频率通、断。改变一个周期内通、断时间的长短,即改变输出电压的“占空比”,从而改变平均电压,控制输出功率。其结构可分为两大部分:从主电源将能量传递给负载的电路称为功率转换电路,其余部分为控制电路。改变脉冲占空比可以实现电动机转速的调节,但首先需要将控制转速的指令信号转换为具有相应占空比的脉冲信号。PWM信号产生的基本方法是,将控制指令信号与固定频率的三角波或锯齿波信号进行比较,从而产生占空比正比于控制指令电压的脉冲信号。如图3所示,SA60自带555定时器外接270 pF的电容产生45 kHz的三角波,当控制指令信号电压大于或等于三角波电压时,输出信号为比较器电源正电压VCC;当控制指令信号小于三角波电压时,输出信号为电源地信号0 V。当电动机由于减速等原因而处于再生制动状态时,传动系统中所存储的机械能会经电动机转换为电能,并通过功率器件回馈到直流母线侧。这些能量一般储存在功率主电路的储能元件中,若不存在能量释放电路,将会导致直流母线侧电压升高,升高的这部分电压称为泵升电压。在这种情况下,如不采取保护措施,就有可能损坏功率器件或储能元件。电路中加上了RC阻容网络,以抑制瞬时泵升电压的产生。电阻选用100 Ω 2 W,电容选择 1 000 pF 100 V[3]。
设置过电流保护电路。过电流保护电路由电流检测环节、运算放大器、比较器等构成。通过0.01 Ω精密电阻对SA60的ISENSE A和ISENSE B引脚电流取样,取样电压经过单电源运算放大器LM324的相加和放大10倍后,与一个2.5 V基准值共同输入到电压比较器LM393,比较输出电流是否超过25 A。
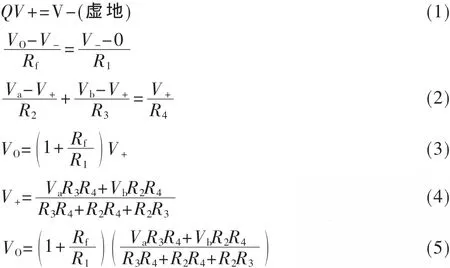
下面求电压放大器的增益计算公式:
4 单片机控制电路设计
4.1 无线接收电路
超再生式接收机具有电路简单、成本低廉等优点而被广泛采用,超外差接收机虽然价格较高,但温度适应性强,接收灵敏度更高,而且工作稳定可靠,抗干扰能力强,所以无线接收模块选用了抗干扰能力强的超外差接收模块。遥控器选用和接收模块配套的远距离遥控器。电池使用A23电池,采用白色的优质塑料外壳,硅胶按键,带拉杆天线。遥控器背后有活动的电池舱盖,可以方便地更换电池。发射距离300 m~500 m。
4.2 模拟输出电路
图4所示,LTC1257是单电源供电,12位输出DA转换芯片。采用LT1021基准芯片提供8 V的参考电压,由于VCC比VREF大 2.7 V,所以 LTC1257能正常输出 0 V~8 V。与控制器的接口采用SPI总线方式通信,接口分别为 CLK、Din、Dout,控制方便。
4.3 ATMEGA128控制单元
ATMEGA128控制单元负责控制模拟信号的输出、过流信息的采集和无线通信。ATmega128为基于AVR RISC结构的8位低功耗CMOS微处理器,具有快速、灵活、集成度高,加密性强和易实现等诸多优点。ATmega128具有 128 KB的系统内可编程 Flash、4 KB的 E2PROM、4 KB的 SRAM、53个通用 I/O口线、32个通用工作寄存器、实时时钟RTC、4个灵活的具有比较模式和PWM功能的定时器/计数器(T/C)、2个USART、面向字节的两线接口TWI、8通道10位ADC、具有片内振荡器的可编程看门狗定时器、SPI串行端口。由于其先进的指令集以及单周期指令执行时间,ATmega128的数据吞吐率高达1 MIPS/MHz,比普通的复杂指令集微处理器高10倍,从而可以缓解系统在功耗和处理速度之间的矛盾[4]。
5 断线钳系统的软件设计
软件设计主要包括:接收到的控制命令码的解码程序、电机调速的DA转换程序和过载保护程序。
5.1 解码程序
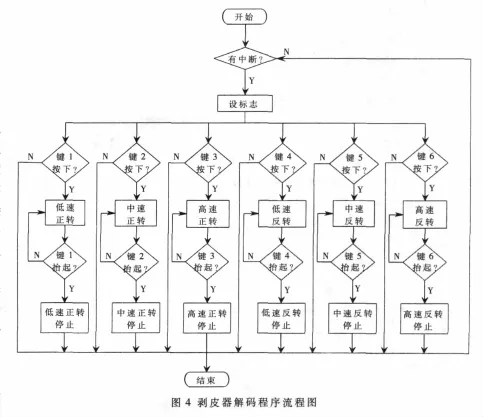
编码芯片PT2262发出的编码信号地址码、数据码、同步码组成一个完整的码字,解码芯片PT2272接收到信号后,其地址码经过两次比较核对后,VT脚才输出高电平,与此同时相应的数据脚也输出高电平。如图4,采用中断的方式来接收发射码并进行解码获得控制命令。
5.2 DA转换程序
如图5所示,由于所采用的减速电机启动和停止电流很大,可以通过改变加载电机两端的电压来实现加减速。基于简单实用考虑,采用DA模拟量调速方式。而软件的做法是通过设置DA转换芯片内部的寄存器来达到,且软件调整量指标更高,调整更可靠、更方便、更准确。为了实现功率模块的保护,当采集到过电流信号时,采用DA输出方式控制电机的输入电压来调节功率模块SA60的输出电流。

图5 DA转换程序流程图
本文所介绍的ATMEGA128单片机控制的PWM功率驱动装置,采用了集成化的芯片设计,因而整个系统的可靠性和集成度得到很大提高。PWM功率驱动装置的输出满足了TEC模块的电气特性要求。另外,系统由ATMEGA128单片机控制,程控性好,易于操作,提高了分辨率和精度,系统实时运行的信息可反馈到ATMEGA128控制系统,以对系统进行监护并处理故障。在实际应用中,自动剥皮器剥皮效果良好,具有很大的实用价值。
[1]戚晖.高压带电作业机器人绝缘防护技术研究[J].高电压技术,2003,5.
[2]曾国华.可控扭矩电动扳手的设计[J].工具技术,2002,36(5).
[3]李邦协.实用电动工具手册[M].北京:机械工业出版社,2007.
[4]马潮.高档8位单片机ATmega128原理与开发应用指南[M].北京:北京航空航天大学出版社,2004.
猜你喜欢
环球时报(2022-09-29)2022-09-29
消费电子(2022年6期)2022-08-25
军民两用技术与产品(2021年12期)2021-03-09
阅读(快乐英语高年级)(2019年2期)2019-09-10
通信电源技术(2018年10期)2018-01-25
现代工业经济和信息化(2016年5期)2016-05-17
现代工业经济和信息化(2016年4期)2016-05-17
消费者报道(2016年3期)2016-02-28
湖北工业大学学报(2016年5期)2016-02-27
风能(2016年12期)2016-02-25
