宜万铁路双块式无砟轨道的测量控制与精度效果分析
2010-05-08 07:22彭学理
铁道标准设计 2010年8期
彭学理
(铁道部宜万铁路建设指挥部,湖北恩施 445000)
宜万铁路双块式无砟轨道的测量控制与精度效果分析
彭学理
(铁道部宜万铁路建设指挥部,湖北恩施 445000)
宜万铁路精密网的布控和轨道几何状态测量仪的正确应用,指导了220km无砟轨道的施工;野三关隧道无砟轨道的应用实践证明了精密测量方法和施工精度的可靠、可控,分析结果表明,测量数据最大可能地接近其真实数值,使得平面测量数据精度在0.5mm内、高程精度一般在0.8mm内、轨道平顺度在0.6‰内,保证了轨道三维定位的准确和高平顺的连续性。
宜万铁路;无砟轨道;测量;精度
无砟轨道具有稳定性、刚度均匀性、精度高,耐久性好、维修工作量显著减少等特点,目前世界上高速铁路发达的德国、日本和法国等国家其线路基本上都采用这种结构。其“高精度,高平顺性,一次性成型”的技术特点决定了必须高度重视施工机械、测量控制网、施测方法和施工工艺,否则将导致无砟轨道精度不能完全满足验标要求。
宜万铁路是一条地形、地质复杂的山区铁路,为保证其按速度目标值开通以及减少后期的轨道维修,在长度大于3000m的隧道中采用CRTSⅠ型双块式无砟轨道结构,无砟轨道长度累计达220km,本文对测量控制实践经验进行了总结和归纳。
1 精密控制网的布设和测量
旅客列车高速运行时安全性和舒适度的重要指标是铁路轨道的平顺度,其包含纵向和横向2个分量,需要局部高平顺和线路整体上的高平顺。
重点是解决精密控制网设置、测设方法、埋设高精度元器件的原理和操作上的困难,使得CPⅢ测量轨道精度误差控制在1mm以内,为无砟轨道施工提供精确三维定位技术。
1.1 三级精密控制网布设和误差计算
铁路轨道的平顺度是评价列车高速运行时旅客安全性和舒适度的重要指标。对于高速度的铁路线路,建立CPⅠ、CPⅡ和CPⅢ三级高精度的测量控制网,来作为勘察、设计、施工、交付运营和维护的基准网。其中CPI为第一级基础平面控制网,为勘测、施工、运营维护提供坐标基准;CPⅡ为第二级为线路控制网,为勘测和施工提供控制基准;CPⅢ为第三级为基桩控制网,为铺设无砟轨道和运营维护提供控制基准,各级平面控制网布网要求见表1。
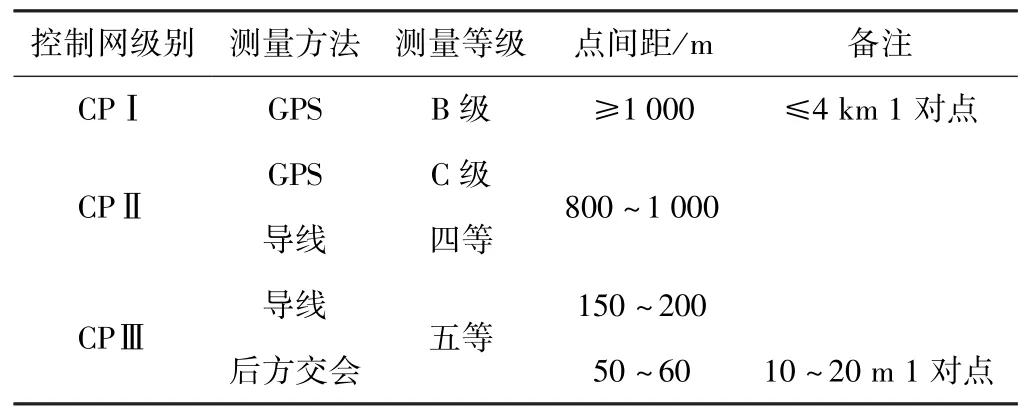
表1 各级平面控制网布网要求_____________
假定导线纵向误差等于横向误差,则可计算最弱点点位中误差分别约为5mm和15mm。
相邻两点的相对中误差计算,GPS测量的精度要求规定见表2。
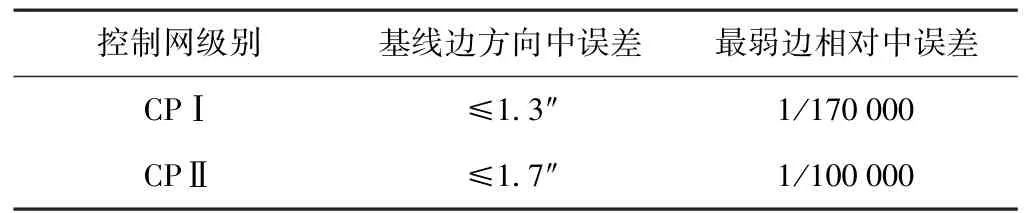
表2 GPS测量的精度要求
1.2 平面控制网的建立
(1)CPⅠ、CPⅡ布测和测量方法
CPⅠ沿线路走向每隧道进出口各设1对点,按铁路B级GPS测量要求施测。基线边方向中误差不大于1.3″,最弱边相对中误差为1/170000。CPⅡ在CPⅠ的基础上采用导线测量方法施测,点间距离800m左右,导线测量等级为四等,测角中误差2.5″,相对闭合差为1/40000。
(2)CPⅢ控制点布测方法
CPⅢ控制点的元器件采用工厂精加工元器件,用不易生锈及腐蚀的金属材料制作,CPⅢ控制点标志重复安置精度达到0.3mm,布置距离为60m左右,且不大于80m(图1),点布设高度与轨道面高度保持一致。
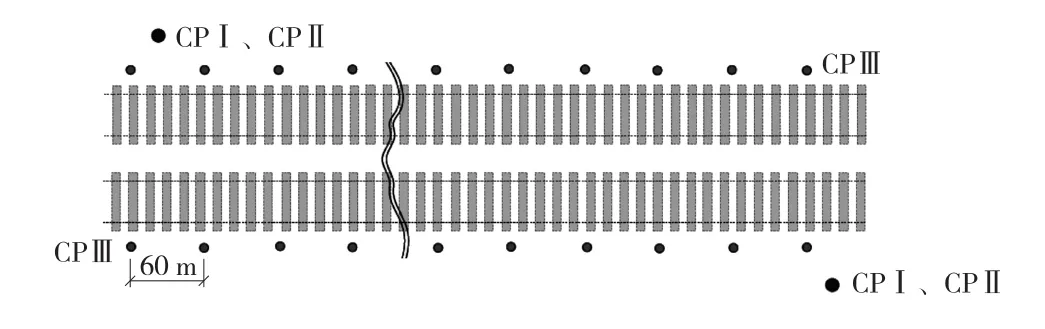
图1 CPⅢ控制点布置示意
(3)CPⅢ控制点的测量
采用自由设站后方交会方法,自由测站测量;每次自由测站,以2×3个CPⅢ点为观测目标,保证每个点测量3次。
1.3 高程控制测量
(1)采用精密水准。每一测段至少与3个二等水准点联测,形成检核。联测时,往测时以轨道一侧CPⅢ水准点为主线贯通,另一侧的CPⅢ水准点在进行贯通水准测量设站时就近观测。返测时以另一侧CPⅢ水准点为主线贯通,对侧的水准点在设站时就近联测。
(2)CPⅢ控制点高程测量数据处理。CPⅢ控制点高程测量须严密平差,平差计算取位按表3中精密水准测量要求执行。
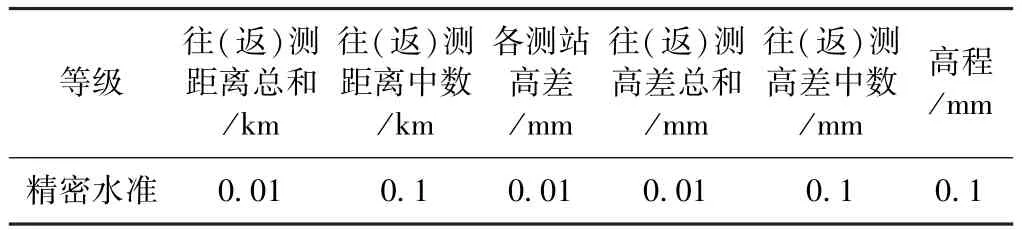
表3 精密水准测量计算取位
1.4 效果分析
建立和应用三级精密控制网进行精确测量为铁路修建提供了高精度过程控制理论和实践依据,尤其是使用CPⅢ作为轨道测量控制网可以将轨道精调时绝对误差控制在1.0mm以内,为无砟轨道提供了精确三维定位技术,达到了高平顺目标。
2 无砟轨道的施工测量控制
2.1 技术原理
将轨道调整分为准确就位、粗调和精调3个步骤来实现的偏差逐步缩小原则。提高整体施工效率、减少排架变形、分级逐步接近、使排架整体受力均匀的工艺原理。
2.2 控制精度的关键
(1)轨排中工具轨的选用和合理的调整方法是保证。
(2)测量的综合控制原则。
(3)综合考虑因素有:CPⅢ精度、全站仪设站精度、测段长度、可靠的平顺连续测量原则,搭接测量顺接过渡的处理措施和数据综合评判。
2.3 粗调
全站仪自由设站法定位,观测附近4个固定在隧道边墙上的控制点棱镜确定坐标;调整原则以先中线后水平的顺序循环进行。
2.4 精调
全站仪测站距离宜为10~80m,前后测站范围内的测量搭接长度为10m。
2.4.1 步骤
(1)确定全站仪坐标。边角后方交会法测量,观测工作面附近8个CPⅢ,自动平差,计算全站仪坐标。下一测站测量时,交叉观测上一测站使用过的6个CPⅢ。
(2)测量轨道数据。测量小车在钢轨上走行,连续检测并实时显示轨道轨距、水平、轨道平顺性、平面位置及高程偏差。
(3)调整高程。用普通六角螺帽扳手,旋转竖向螺杆,调整轨道水平、超高。高度尽量往上调整,不下调。
(4)调整中线。采用双头调节扳手,左右同时调整轨向锁定器。
2.4.2 方法应用
(1)全站仪采用自由设站法定位,精调测量和复测时,至少交叉观测后方利用过的6个控制点。为提高测量精度和综合评判的准确性,需要记录每次全站仪的设站位置,保证在精调测量、复测检查和后期的轨道综合整理测量控制中,全站仪的设站位置和测量范围相同。由于仪器的频繁搬动,要求测量仪器不仅定期全面校核,在每工班作业前,还必须对轨道检测小车进行水平和轨距校核、对全站仪进行方向和水平校核。
(2)为了得到较为准确可靠的测量数据,使用轨道检测小车进行精调测量时,需要按照“定点定位,两点一线,顺序进行,由远及近”的原则进行,并结合“测点距离、平差精度、同测点的绝对测量偏差值”来综合判断测量数据的精度和可靠性。在没有日光直接影响的隧道内,距离测站10~80m(为提高精度等级,曲线段可取10~60m)长度范围内的数据具有较高的准确度,搭接测量段长度宜为5~10m,顺接段内的数据递减值宜为0.2~0.4mm/每枕;测量时,测站位置、数据记录和数据的分析判断很重要,要求技术负责人、轨道工程师和测量工程师都参与评判。
(3)顺接过渡方法:以2个设站区间为例。相邻设站点间隔60m,精调测量区间为距设站点第10~80m范围,每两个设站点之间必须考虑搭接测量段和顺接过渡段。
①原理:因使用了不同的CPⅢ控制点,全站仪设站测量平差的精度也有所不同,对过渡段的测量点使用不同的设站进行测量,所得到的轨道偏差数据有所不同;因为同点位,不同设站点测量得到的数据不同,为保证轨道的高平顺性,需要设立顺接段对相邻测点进行顺接过渡处理;顺接过渡段的设置长度与测点的两组数据偏差值大小有关,根据测量偏差值的大小来确定顺接过渡段的长度,测量偏差量越大,设置的顺接过渡段长度越大,一般可取10m。
②顺接过渡方法:在CPⅢ点精度、设站精度、全站仪精度、轨检小车精度符合规范要求的情况下,两设站点测量同测点的高程偏差值不会大于1.5mm;若站点1、站点2测量的偏差值大于2mm,则需要检查设站点1和设站点2的设站精度,如设站精度没有问题,则需要对CPⅢ控制点进行复测;顺接过渡段从搭接段后的第一根轨枕开始,采用内插法,下一根轨枕依次比上一根轨枕数据偏差递减,直到绝对偏差约为零(图2,图中以偏差值0.5mm为例)。
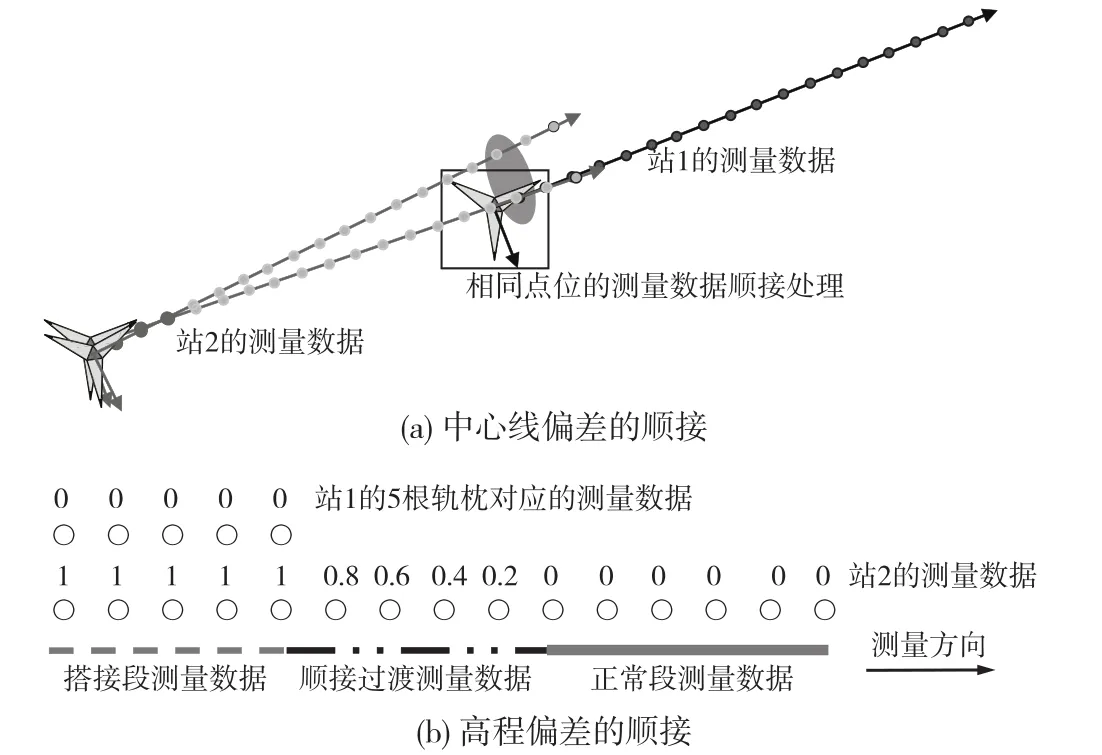
图2 中心线和高程偏差处理示意
2.5 轨道过程控制标准
根据理论分析和现场实践经验,制定的过程控制标准如下。
(1)就位精度:高程-10~0mm,中心线±10mm。
(2)粗调精度:高程-2~0mm,中心线±1mm。
(3)精调后支撑点处的精度:高程-0.5~+0.5 mm,水平-0.5~+0.5mm,中心线±0.5mm,轨距-0.1~+0.5mm。
(4)精调后轨道全面复测精度:高程-0.8~+0.8mm,水平-0.5~+0.5mm,中心线±0.5mm,轨距-0.1~+0.5mm。
(5)搭接段的两次设站数据差值:高程-1.0~+1.0mm,水平-0.5~+0.5mm,中心线±0.5mm,轨距-0.1~+0.5mm。
(6)轨道精调固定后,尽早浇筑混凝土,若轨道精调固定后24h以上或环境温度变化超过15℃时,需再次进行轨道几何的检测、调整。
3 效果分析
该测量和精度技术首先在野三关隧道无砟轨道施工中成功应用,而后全面推广。最后换铺500m长钢轨及线路锁定后的检测表明轨道结构形位都满足了验标要求,99%的数据偏差都在1.0mm以内,实现了施工过程中“提高一级控制精度”的目标(偏差统计见表4),后期轨道不需要增加扣件调整,消除了轨道的永久性缺陷。
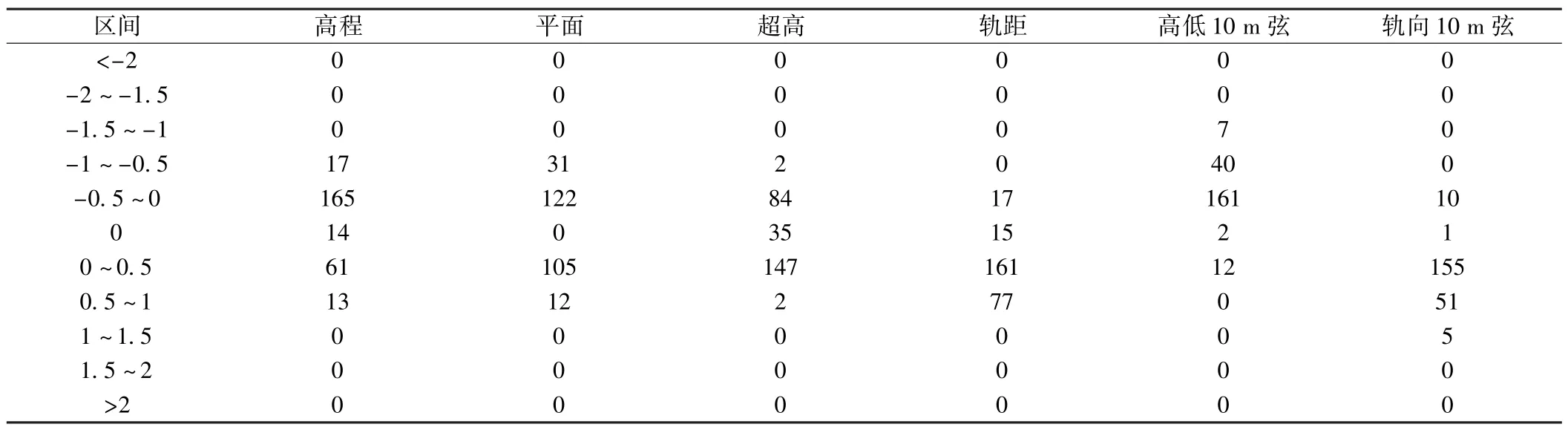
表4 偏差统计mm
[1] 卢祖文.树立全新建设理念 建设一流客运专线[J].铁道工程学报,2005(1).
[2] 何华武.无砟轨道技术[M].北京:中国铁道出版社,2005.
[3] 赵东田.无砟轨道在铁路建设中的应用分析[C]∥铁道部工程设计鉴定中心,中国铁道学会.铁路客运专线建设技术交流会论文集.武汉:长江出版社,2005.
[4] 赵东田.双块式无砟轨道施工质量控制技术及措施[J].铁道工程学报,2009(5):24 -27.
[5] 席光勇,赵东田.桥上长枕埋入式无砟轨道施工工法(2002年度国家级工法,编号YJGF24—2002).
[6] 王其昌.高速铁路土木工程[M].成都:西南交通大学出版社,1999.
[7] 赵东田.双块式无砟轨道原理及工程实践[J].铁道标准设计, 2008(10):1 -5.
[8] 赵东田,王铁成,刘学毅,等.板式轨道CA砂桨的配制和性能研究[J].天津大学学报(自然科学版),2008(8):22 -28.
[9] 赵东田,宗德明,胡华军,等.客运专线双块式无砟轨道组合轨道排架法施工工法(2008年度铁道部部级工法)[J].铁道标准设计,2009(S2).
[10] 孟文林,赵东田.系统认识双块式无砟轨道的施工技术控制[J].山东大学学报(工学版),2009(5):195 -196.
[11] 金守华.系统理解客运专线标准体系树立全新铁路建设理念[J].铁道建筑技术,2005(2):1 -4.
[12] 赵东田,孙 晖.CRTSⅠ双块式无砟轨道综合整理技术[J].铁道标准设计,2009(11):28 -30.
U213.2+44
A
1004 -2954(2010)08 -0046 -03
2010 -05 -10
彭学理(1962—),男,高级工程师,1986年毕业于上海铁道学院铁道工程专业。
猜你喜欢
铁路计算机应用(2022年8期)2022-09-06
中国水运(2022年4期)2022-04-27
矿产勘查(2020年1期)2020-12-28
水电站设计(2020年4期)2020-07-16
建材发展导向(2020年6期)2020-07-13
铁道建筑技术(2020年11期)2020-05-22
工程与建设(2019年3期)2019-10-10
中国建材科技(2017年2期)2017-09-03
华东交通大学学报(2016年6期)2016-12-27
中国新技术新产品(2016年16期)2016-12-12