
城市轨道车辆电阻制动能量回收试验系统研究*
2010-05-04 03:39陈晓丽宋瑞刚尧辉明
铁道机车车辆 2010年2期
方 宇,陈晓丽,宋瑞刚,尧辉明,杨 俭
(上海工程技术大学 城市轨道交通学院,上海201620)
本文在城市轨道车辆模拟牵引系统的基础上,对城市轨道车辆电阻制动能量回收试验系统进行了研究,拟通过此试验系统对城市轨道车辆模拟牵引单元电阻制动能量进行回收,并加以合理利用。
1 城市轨道车辆模拟牵引系统基本原理
30 kW城市轨道车辆模拟牵引系统基本原理如图1所示,包括牵引整流逆变单元、牵引电机等。该试验系统可以模拟车辆实际运行工况中的牵引电机运行状态,对所测得数据的分析可用于指导实际牵引、制动工况中的控制研究。
模拟TCU的主要作用是控制牵引电机和负载电机按照现有车辆ATO模式运行,3级飞轮模拟车辆运行在AW0(空载)、AW1(满载)、AW2(超载)3种工况下的机车转动惯量。
该系统的基本工作原理如下:
(1)当牵引时,将交流电整流逆变后,变压变频驱动控制牵引电机;当制动时,牵引电机变为发电机,通过整流将交流电转换成直流电,同样运行阻力加载过程也是将交流电整流逆变后,由模拟TCU单元变压变频驱动控制负载电机,该电机用于模拟车辆实际运行时的阻力加载。
(2)通过机械控制方式来改变3级飞轮的档次以模拟实现车辆惯量加载3种工况。利用模拟TCU单元对车辆牵引和制动的各种参数进行设定和测量,并通过实施相应的控制策略,使该系统模拟城市轨道车辆现有ATO或手动运行模式的要求。
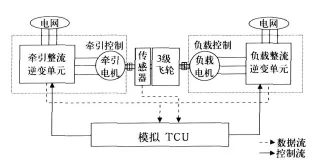
图1 城市轨道车辆模拟牵引系统原理图
2 城市轨道车辆电阻制动能量回收试验系统设计
在城市轨道车辆模拟牵引系统研制的基础上,对城市轨道车辆电阻制动能量回收试验系统进行了设计,该系统基本结构如图2所示,主要包括储能单元、控制单元、用电器及其辅助电源等。
2.1 试验系统储能单元
试验系统储能单元主要包括电双层电容器组及其接口电路、监测系统等。电双层电容器组在试验系统中的主要作用是对城市轨道车辆模拟牵引系统实施电阻制动时,将过去由发电机产生并消耗在制动电阻上的能量进行存储,并利用放电回路对其加以合理利用。
电双层电容器组由若干单体容量为2 400 F的电双层电容器(EOLC:Electric Double Layer Capacitor)采用串并联的形式所组成,在储能组件中的每组电双层电容器上均装有旁路电流达100 A的平衡电路板,以均衡在串联工作状态下每支电双层电容器上的工作电压,保证电双层电容器的工作安全。
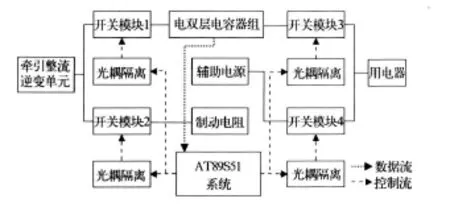
图2 城市轨道车辆电阻制动能量回收试验系统基本结构
储能单元提供有与牵引单元的接口电路,同时分别提供两路DOWN和UP的干接点信号以供进一步控制开发使用,其中DOWN干接点信号对应电双层电容器组工作起始状态,UP干接点信号对应电双层电容器组工作截止状态,其中DOWN干接点信号对应电压可在一定范围内进行调节。
2.2 试验系统控制单元
试验系统控制单元主要以AT89S51单片机系统为核心构建,其外围电路又包括光耦隔离、大功率高速开关及其驱动模块等。
单片机系统的前向通道与后向通道均采用光耦隔离芯片将其与输入、输出部分隔开,以保证其数据采集、控制的精确性。在牵引整流逆变单元与电双层电容器组、制动电阻之间的切换采用大功率的集成IGBT模块,该模块可以采用5 V的单片机系统直接驱动,电双层电容器组、辅助电源与用电器之间的切换根据用电器的形式(交、直流)差异,采用大功率的MOSFET芯片或固态继电器。
2.3 城市轨道车辆电阻制动能量回收试验系统基本工作原理
(1)系统初始状态
系统初始状态时,在控制单元的作用下,关断开关模块1,导通开关模块2,牵引单元与制动电阻连通,如牵引单元制动产生电能则首先通过制动电阻释放,以保证系统工作安全。开关模块3关断,开关模块4导通,同样首先采用辅助电源向相关用电器供电。
(2)系统工作状态
系统控制单元循环检测电双层电容器组电压:当采集到电双层电容器组有DOWN干接点信号输出时,导通开关模块1,关断开关模块2,牵引单元制动时通过DC/DC充电电路向电双层电容器组充电,控制单元接着继续判断电双层电容器组系统是否输出UP干接点信号:
(a)如没有,执行以下操作:保持“导通开关模块1,关断开关模块2”的状态不变,然后,同时开关模块3导通,开关模块4关断,电双层电容器组开始向用电器供电;
(b)当检测有UP干接点信号输出时,执行以下操作:关断开关模块1,导通开关模块2,牵引单元与制动电阻连通,其制动产生的电能通过制动电阻得以释放。保持放电电路状态,处理完毕后返回主循环继续检测并执行相应动作。
3 城市轨道车辆电阻制动能量回收试验
试验研究是基于城市轨道交通车辆模拟牵引系统和电阻制动能量回收试验系统进行的。主要研究车辆牵引速度、转矩、制动电流等参数的变化规律,通过测试的数据,进而计算出制动及回收的能量。试验之前要进行如下几个方面的设置:
(1)牵引曲线设置
通过模拟TCU单元控制前面板中的曲线设置窗口,输入牵引运行曲线控制函数,模拟车辆ATO运行工况。因试验重点是考察牵引与电阻制动过程,故对运行曲线进行简化设置,其运行曲线如图3所示,最高转速可达1 500 r/min。
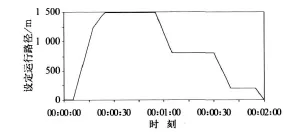
图3 试验台模拟输入的城市轨道车辆AT O运行曲线
(2)惯量设置
通过牙嵌式离合器机械换挡的方式来改变3级飞轮的加载档次,牙嵌式离合器同时设有机械锁死机构,防止飞轮转动过程中发生横向移动和碰撞。
(3)控制方式设置
牵引电机由变频调速系统按矢量控制方式,做转速闭环控制;负载电机(测功机)变频调速系统按DTC(直接转矩控制)方式,做转矩闭环控制,共同模拟牵引负载的互动变化。
牵引控制单元在电机制动时同样有两种电能处理方法,即回馈电网的再生制动和由制动电阻消耗的电阻制动,为方便试验研究将牵引控制单元的制动方式直接设定为电阻制动。
图4为在AW3工况下,利用回收试验系统测量的车辆牵引模拟转速、转矩曲线,可以看出该曲线与设置的运行曲线(图3)基本一致,图中转矩为负的区段:AB、CD、EF段代表制动区域。
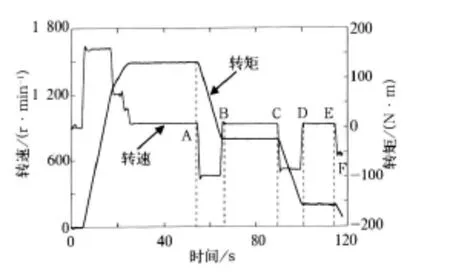
图4 AW3工况牵引转速、转矩测试曲线
图5为AW3工况下电阻制动能量回收测试曲线,对应图4中的制动区域,在图5中均产生制动电流,相对应制动能量明显增加的区域分别为A1B1、C1D1段,最后一阶段的制动区域由于速度较低,产生制动电流很小,故在图中未加以标注。
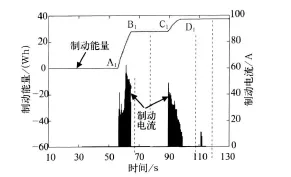
图5 AW3工况电阻制动能量回收测试曲线

图6 AW3工况电双层电容器组充放电特性测试曲线
图6为AW3工况下电双层电容器组充放电特性测试曲线。在本试验系统中的用电器为DC110 V(或AC110 V),考虑电双层电容器组和用电负载的匹配关系,以及电双层电容器组的深度压降问题,将电双层电容器组DOWN干接点信号输出对应电压调整至130 V。可以看出,当产生充电电流时,电双层电容器组电压有一段迅速升高过程,分别为A2B2、C2D2区域,最后一阶段同样由于制动电流太小,因此对应在图6中该阶段的电双层电容器组充电特性表现的也不明显。从图6还可以看出,当电双层电容器组储能电压高于130 V时,在控制单元的作用下开始对用电器供电,随着供电时间的延长其电压呈下降状态,当储能电压降至130 V以下时,又在控制单元的作用下切换至辅助电源供电,而电双层电容器组停止放电,得以保持电双层电容器组的电压。
4 结束语
在城市轨道车辆模拟牵引系统的基础上,对城市轨道车辆电阻制动能量回收试验系统进行了设计。试验结果表明利用该系统可以对城市轨道车辆模拟牵引系统电阻制动能量进行有效回收,并提供给车辆用电器使用。该试验系统的开发对城市轨道交通车辆电阻制动能量回收控制方法的研究具有一定的理论价值和现实意义。
[1] 殳企平.城市轨道交通车辆制动技术[M].上海:上海工程技术大学城市轨道交通学院,2005.
[2] 刘宝林.地铁列车能耗分析[J].电力机车与城轨车辆,2007,30(4):65-68.
猜你喜欢
中学生数理化·中考版(2020年10期)2020-11-27
房地产导刊(2020年8期)2020-09-11
物理之友(2020年12期)2020-07-16
电子制作(2019年22期)2020-01-14
铁道通信信号(2020年8期)2020-01-05
山东冶金(2019年5期)2019-11-16
中学生数理化·中考版(2018年11期)2019-01-31
铁道通信信号(2019年1期)2019-01-16
铁道通信信号(2018年6期)2018-08-29
制造技术与机床(2017年3期)2017-06-23
