
三维激光扫描技术在文物三维重建中的应用研究
2010-04-18 06:54王昌翰向泽君刘洁
城市勘测 2010年6期
王昌翰,向泽君,刘洁
(重庆市勘测院,重庆 400020)
三维激光扫描技术在文物三维重建中的应用研究
王昌翰∗,向泽君,刘洁
(重庆市勘测院,重庆 400020)
三维激光扫描技术为文物高精度三维重建提供了新的途径,为文物的数字化展示、数字博物馆的建立、文物鉴赏以及文化遗产的保存提供了新的思路。本文通过对三维点云数据处理、三维构网、纹理映射、三维模型构建及三维浏览等关键技术研究,解决了三维激光扫描系统用于高精度文物三维重建中的若干技术难题,并精确重建出文物三维模型。
三维激光扫描;文物;三维重建
1 前 言
文物的数字化展示以及数字博物馆的建立是近年来研究的热点。精确重建出的文物三维模型在永久保存文物原貌、文物鉴赏与研究、文物修复等方面具有极其重要的意义;同时,利用虚拟现实手段对数字化三维文物模型进行三维可现化展示、改变了传统文物展示模式,人们可身临其境地在三维虚拟环境中多角度浏览。
随着地面三维激光扫描系统软硬件的不断完善,将地面三维激光扫描系统应用于文物三维重建受到极大关注,特别是在激光点云数据去噪、激光点云与数字影像的配准、离散激光点云的构网、三维模型的纹理映射等方面。本文以重庆大足石刻千手观音和卧佛为例探讨了三维激光扫描技术在造型非常复杂的文物三维重建中的关键技术和难点,并研发文物三维仿真浏览平台,集成海量数据,实现对所建文物三维模型的各种测量、分析和漫游等功能。
2 数据采集
选用Riegl公司的LMS-Z420i三维激光扫描仪进行数据获取,LMS-Z420i三维激光扫描仪精度较高,测速快、稳定性好,它完成一个全景(360°水平)的最高精度扫描只需要10多分钟时间,激光安全等级高,配置的相机较好,能够满足应用要求。
对应扫描对象,设置可控制整体场景的标靶,在360°环境,使用4个标靶。然后分左、中、右三站对千手观音造像进行三维激光扫描,并同时用扫描仪配置的高精度数码相机拍摄同轴影像。扫描的点间距为1 mm~3 mm。
完成扫描后,利用三维激光扫描系统配套软件提取点云数据以及相应的影像数据,并对其整理以备后期处理工作。
3 多视点激光点云的全自动无缝拼接
激光扫描仪在某一视点扫描目标时,由于受到观察方向和目标本身形状的限制,不可能获得扫描目标的完整信息。因此,为了构建目标完整的三维模型,需要选择不同的视点对目标进行扫描。获取数据时,由于每个视点获取的激光扫描数据都位于各自的激光扫描坐标系中,需要将从不同视点获取的激光点云数据统一到某个固定的坐标系中。基于标靶的全自动点云拼接原理如下:
每站扫描的点云数据都在以扫描仪位置为零点的局部坐标系下,即每次经扫描得到的激光点云的坐标系是独立和不关联的。因此,为了进行点云拼接,在场地中设置标靶。一般要求标靶面要与扫描的方向垂直(即标靶面正对扫描仪),标靶与扫描仪间的距离要在扫描仪的有效使用范围内。标靶要均匀分布于整个扫描范围或重叠范围,互相之间尽量远离。
实际扫描时,从多个测站对同一组标靶进行扫描。使得各站的扫描结果中相邻两站均包含3个以上不共线且不共面的同名标靶。在扫描过程中,扫描仪可以在指定的视场范围内自动寻找标靶并以极高的点密度进行精确扫描,处理软件可以自动提取标靶中心点坐标。各站点云间的关系由标靶精确确定的同名控制点决定。如果控制点数目多于3组,就可以获得最小二乘意义上的变换参数,从而完成对各站数据更精确的拼接。七参数坐标转换法适用于欧拉角很小的两坐标系之间的转换,但由于激光扫描仪各测站坐标系之间欧拉角可能很大,故采用以下转换模型:
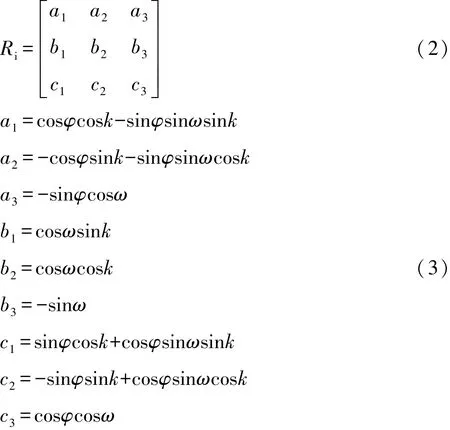
在相邻的第i组和第i+1组激光点云Mi和Mi+1中,假设确定出n组同名点对。(Xi,Yi,Zi)与(Xi+1,Yi+1,Zi+1)是这些共轭点对中的一组,它们之间表达成关于旋转变量(ψi,ωi,ki)和平移变量(Ti,X,Ti,Y,Ti,Z)的函数关系式为:

其中,λi是比例系数;Ri,是关于旋转变量(ψi,ωi,ki)的旋转矩阵,ai,bi,ci是由旋转变量的函数组成的方向余弦,各参数值如(5)式所示[1]。
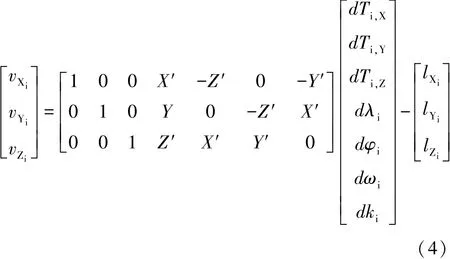
那么,第i组离散点云与第i+1组离散点云的空间三维相似变换的误差方程式的矩阵形式如式(4)所示[2]:
依靠标靶控制点计算点云之间的变换参数,有多余观测时,迭代求解,直到未知数的改正数足够小为止,则实现各站点云之间精确的坐标统一。激光点云的获取也可以在已知参考坐标系下进行测量。另外,在独立坐标系下的测量数据,统一到一个坐标系后,也可以配准到已知的参考坐标系下。
4 三维构网方法
Delaunay三角形理论在二维Delaunay三角网的构建上最为成功,但其理论与方法不能直接推广到三维Delaunay三角网的情形。基于最大-最小角的对角线交换技术在三维空间的三角剖分中也不再成立。三维Delauany剖分理论研究还尚未成熟,仍需要继续完善。对于复杂的物体,自动生成的三维三角网不能保证其质量。目前仍没有一种通用的三维Delauany剖分方法能够准确的表现各种模型。
总的来说,目前二维Delaunay三角网凭借其优良的性能,成为最常用的三维点云构网方法。空间数据的二维构网方法的数据结构比三维构网方法简单,且能够准确的反映目标表面的特征变化。不过当空间点集出现内部点互相重叠遮挡的情况,按照二维构网的原则进行处理,重叠部分的点将出现错误连接,因此,这种方法适用于不重叠的三维点云表面模型的构建。
5 激光点云与数字影像的配准
仅仅依靠激光点云对物体进行三维建模是不够的,缺乏对表面纹理特征的有力表达。数字影像可以提供丰富的光谱信息和真实的纹理信息,要将激光点云和数字影像结合首先需要解决的问题是两种数据的配准。激光点云是三维数据,而数字影像是二维数据,要将它们进行配准有三种方案。
第一种方案是将三维激光点云视为数字影像的物方点,通过找对应特征点的方法,直接将两者进行配准。第二种方案是将同一视点的多张数字影像匹配生成物方三维点云,然后将激光点云与匹配点云进行配准。第三种方案是将激光点云投影生成的模拟影像与实际拍摄的数字影像进行配准。
LMS-Z420i三维激光扫描仪实现了与数码相机的集成,且其中一部分硬件系统获取的数字影像与激光扫描数据能够进行最佳套合,即获取的三维点云数据和二维影像数据是一一对应的。在扫描仪获取激光点云的同时,相机拍摄高分辨率数字影像,影像数据的转换矩阵由与扫描系统相关的矩阵和与相机绑缚相关的矩阵共同构成。根据这种特征,系统能够自动实现激光点云与数字影像的配准,通过硬件的方法解决了软件配准上的不足,大大提高了配准的精度。
6 几何模型的纹理重建
三维重建的过程包括几何建模与纹理映射。在获取目标完整的三维点云后,对这些离散点构建不规则三角网,从而获取目标的三维几何模型。对目标的几何模型恢复其纹理信息的过程即为纹理重建。纹理重建的主要目的就是建立三维几何模型与影像之间的纹理映射,即建立几何模型上各三角形顶点与影像像素之间的对应关系。
目标的三维几何模型已经建立,激光点云与数字影像配准以后,三维点云与影像之间的对应关系也已知,因而就可以进行纹理映射,将影像上的纹理赋给三角网模型,生成具有真实纹理的三维模型。由于激光点云和数字影像的精度都比较高,按照纹理映射原理计算得到的结果,误差就比较小,而且多余同名点也可进行联合平差以减少误差。
7 实验与分析
7.1 多视点云的全自动无缝拼接
由于千手观音造像正在进行抢救性保护工程,前面搭有两层架子,对数据的获取造成一定程度的遮挡。选择在中间一层平台分左、中、右三站对千手观音造像进行三维激光扫描,扫描的点间距为1 mm~3 mm,并同时使用扫描仪顶部配置的尼康单反数码相机拍摄高分辨率同轴数字影像。扫描获得千手观音左、中、右三站激光点云数据,经过粗差剔除后,分别如图1~图3所示。

图1 千手观音第一站点云数据
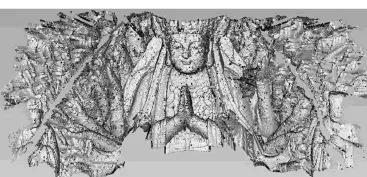
图2 千手观音第二站点云数据
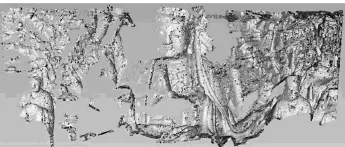
图3 第三站点云数据图

图4 千手观音拼接融合后的整体点云数据
扫描时在场地中设置4个不共线也不共面的标靶,通过标靶将独立坐标系下的三站激光点云数据统一到同一个坐标系中。去除重合的点云,将三站点云数据融合成整体,如图4所示。
7.2 激光点云与数字影像的配准
激光扫描硬件系统实现了与数码相机的集成,系统获取的激光点云与数字影像能够进行最佳的套合,三维点云数据和二维影像数据一一对应,从而自动实现激光点云与数字影像的配准。
7.3 离散激光点云的构网
根据二维Delaunay三角网的剖分方法,对离散点云进行不规则三角网的构建,得到几何建模后的表面模型。由结果可以看出,这种构网方法能够很好地保持重建对象的特征。
7.4 几何模型的纹理映射
根据激光点云与数字影像的配准结果,用同步影像对千手观音和卧佛造像构网后的几何模型进行纹理映射,并通过对明暗、高光、对比度和扩散系数等参数的设置对模型进行渲染,得到逼真的文物三维模型,如图5所示。

图5 千手观音三维模型
至此,通过三维激光扫描系统获取的数据、经过拼接、三维构网、纹理映射等工作,完成了文物的三维重建。然后在文物三维仿真浏览平台上,用户以第一人称视觉方式在虚拟的三维空间中浏览,可进行放大、缩小、测量等功能,如图6所示。
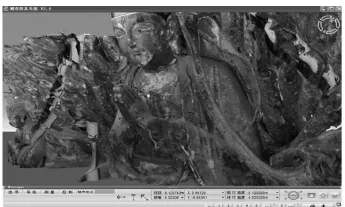
图6 千手观音三维浏览平台
8 结 论
给合应用多种数据获取方法及多源数据的融合是目前文物三维重建的发展趋势。将三维激光扫描技术与基于影像的建模技术结合进行文物三维重建,将加快三维重建的速度和提高模型的精度,使重建出的三维模型更加完美逼真,具有很大的实用价值和广阔的应用前景。本文提出的方法在一定程度上解决了三维激光扫描技术应用于文物三维重建的相关问题,但是在点云模型简化方法、三维三角网构网方法、基于影像的三维重建、近景摄影测量与三维激光扫描仪结合使用等关键技术方面仍有待进一步研究。
[1] 王之卓.摄影测量原理[M].北京:测绘出版社,1979
[2] 李德仁,郑肇保.解析摄影测量[M].北京:测绘出版社,1992
[3] 李志林,朱庆.数字高程模型[M].武汉:武汉测绘科技大学出版社,2000
[4] 尤红建.激光三维遥感数据处理及建筑物重建[M].北京:测绘出版社,2006
[5] 赵煦,周克勤,闫利.基于激光点云的大型文物景观三维重建方法[J].武汉大学学报(信息科学版),2008,33 (7):684~687
The Study of the Application of the 3D Laser Scanning Technology in the 3D Reconstruction of Cultural Relics
Wang ChangHan,Xiang ZeJun,Liu Jie
(Chongqing Survey Institute,Chongqing 400020,China)
The 3D Laser Scanning Technology provides a new approach for the high-precision 3D reconstruction of cultural relics and a new solution that can be applied in the digital displaying of cultural relics,the construction of digital library,the identification of cultural relics,and the protection of cultural heritage.This paper does some research on the key technologies which including the processing of 3D laser point cloud data,3D triangulation,texture mapping,3D model construction,and 3D viewing.This paper resolves some technical problems of the 3D laser scanning system that used in the high-precision 3D reconstruction of cultural relics to reconstruct the 3D models of cultural relics accurately.
3D laser scanning;cultural relics;3D reconstruction
1672-8262(2010)06-67-04
P234
A
2010—06—22
王昌翰(1967—),男,正高职高级工程师,主要从事测绘及空间地理信息开发应用。
猜你喜欢
社会科学战线(2022年3期)2022-06-15
艺术大观(2019年17期)2019-10-09
模具制造(2019年3期)2019-06-06
测绘工程(2018年3期)2018-03-20
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27
现代营销·经营版(2015年3期)2015-04-20
人间(2015年21期)2015-03-11
测绘学报(2015年4期)2015-01-14
新媒体研究(2014年6期)2014-06-18
大地测量与地球动力学(2014年3期)2014-02-13
