
在恒压喷灌控制系统中的应用
2010-03-21 08:53陈乾忠
湖南水利水电 2010年4期
陈乾忠
(娄星区水利局娄底市417000)
前言
娄底市娄星区茶园节水灌溉建设项目位于茶园镇桎木村,距娄底市城区约12 km,距省道S209线1.5 km,有乡村公路直抵项目区,交通便利。项目区内桎木水库(小Ⅰ型)水面宽阔,森林资源丰富,自然风光优美,传统农业和现代农业相交融,主要种植枇杷、梨子、杨梅、橘子等果树作物和蔬菜。
项目区山高水低,灌溉条件差,通过实施节水灌溉,能使有限的水资源得到充分利用,提高水的利用率,改善灌溉条件,充分利用现有土地资源,增加农业科技含量和综合开发潜力,为建设“生态农业、高效农业、循环农业”的发展目标奠定基础。项目的实施,还将在全区农业种植结构调整中起到良好的示范作用,对增加当地农民收入,促进经济发展,具有深远的意义。
1 项目概况
娄星区属洞庭湖平原向雪峰山过渡的丘岗地带,以岗、平为主,平、岗、丘、山俱全。北部峰峦叠嶂,西、中部岗地展布,南部丘陵起伏,东部平原宽阔,形成了北、西、南三面高和由西向东开口的马蹄形地貌。项目区气候条件良好,属亚热带季风性气候区,多年平均气温17.3℃,无霜期281天,利于工程施工;交通便利,距娄底市城区12 km,距省道S209线1.5 km,有乡村公路通达项目区;水量充沛,可通过从桎木水库提水解决施工用水;农村电网实施了改造,电力供应满足施工要求,10 kV线路已架设至泵站站址处。
2 恒压喷灌控制系统总体方案确定
该控制系统主要由传感器(压力、水位和土壤湿度)、变频器、恒压控制单元、水泵机组以及低压电器等所组成。系统的主要任务是利用恒压控制单元使变频器控制一台水泵或循环控制两台水泵,实现管网水压恒压或在恒压值附近波动和水泵电机的软启动以及变频水泵与工频泵之间的切换,同时还要能对运行数据进行传输。
该控制系统结构简单,它将调节器和PLC可编程控制器等硬件集成在变频器供水基板上,通过设置指令代码实现PLC和PID等电控系统的功能。它虽然微化了电路结构,降低了设备成本,但在压力设定和压力反馈值的显示比较麻烦,在调试时,PID调节参数寻优困难,调节范围小,系统的稳态、动态性能不易保证。其输出接口的扩展功能缺乏灵活性,数据通信困难,并且限制了带负载的容量,因此仅适用于要求不高的小容量场合。
这种控制方案既有扩展功能灵活方便、便于数据传输的优点,又能达到系统稳定性及控制精度的要求。
3 PID调节原理在恒压喷灌控制系统中的应用
在茶园恒压喷灌控制系统的设计中,选用了具有PID调节模块的三菱FR-740-1 SK-CH型变频器来实现闭环控制。通过对水压设定值与压力传感器的反馈信号进行比较,产生差值,其偏差值由变频器内部PID调节器按预先规定的调节规律进行运算,得出调节信号,用来控制变频器的输出电压和频率,从而改变水泵的转速以保证喷灌管网的压力恒定,较好地满足系统的恒压要求。
3.1 PID控制原理
在连续控制系统中,常采用Proportional(比例)、Integral(积分)、Differential(微分)控制方式,称之为PID控制。PID控制是连续控制系统中技术最成熟,应用最广泛的反馈控制方式。具有以下优点:理论成熟,算法简单,控制效果好,易于为人们熟悉和掌握。
常规PID控制系统原理框图如图1所示。系统由模拟PID控制器和被控对象组成。

图1 模拟PID控制系统原理图
PID控制器是一种线性控制器,它是根据目标值(设定值)r(t)与反馈值(测量值)Y(t)之间的偏差e(K):

经比例(P)、积分((I)和微分((D)运算后通过线性组合构成控制量u(K),对被控对象进行控制,故称PID控制器。
控制规律为:

式中Kp——比例系数;
T1——积分时间常数;TD—微分时间常数。相应地传递函数形式为:

PID控制器各环节的作用及调节规律如下:
(1)比例环节:成比例地反映控制系统偏差信号的作用,偏差e(K)一旦控制器立即产生控制作用,以减少偏差。比例环节反映了系统对当前变化的一种反映。比例环节不能彻底消除系统偏差,系统偏差随比例系数Kp的增大而减少,比例系数过大将导致系统不稳定。
(2)积分环节:表明控制器的输出与偏差持续的时间有关,即与偏差对时间的积分成线性关系。只要偏差存在,控制就要发生改变,实现对被控对象的调节,直到系统偏差为零。积分环节主要用于消除静差,提高系统的无差度。积分作用的强弱取决于积分时间常数Tt;T越大,积分作用越弱,易引起系统超调量加大,反之则越强,易引起系统振荡。
(3)微分环节:对偏差信号的变化趋势(变化速率)做出反应,并能在偏差信号变得太大之前,在系统中引入一个有效的早期修正信号,从而加快系统的动作速度,减少调节时间。微分环节主要用来控制被调量的振荡,减小超调量,加快系统响应时间,改善系统的动态特性。但过大的TD对于干扰信号的抑制能力却将减弱。
PID的三种作用是相互独立,互不影响。改变一个调节参数,只影响一种调节作用,不会影响其他的调节作用。然而,对于大多数系统来说,单独使用一种控制规律都难以获得良好的控制性能。如果能将它们的作用作适当的配合,可以使调节器快速、平稳、准确地运行,从而获得满意的控制效果。
3.2 恒压喷灌PID调节过程分析
恒压喷灌的目的就是要保证供水能力QG适应喷灌用水需求Qu变化。当供水能力QG和喷灌用水需求QU之间不能平衡时,必然引起压力的变化。因此,可根据压力的变化,来实现对供水流量的调节,维持供水能力QG和喷灌用水需求QU之间的乎衡。
在喷灌系统中,变频器、PID调节器、压力变送器、电机、水泵等构成了一个闭环控制系统,可以对供水能力实现有效的自动调节,从而实现恒压喷灌。其实现方法是,首先根据喷灌管网对水压的要求,给PID调节器预置一个目标压力值,管道中的实际水压,经压力变送器转换成(4~20)mA的模拟电流信号反馈给变频器内置的PID调节器,PID调节器根据目标压力值和实际压力值的偏差,给出调节量,自动调节变频器输出频率,调节电机转速,使供水量适应用水量的变化取得动态平衡,维持水压不变。其具体调节过程如下:
(1)稳态运行。
当供水能力QG=用水需求Qu,目标压力信号r(K)和压力反馈信号y(K)相等,偏差e(K)=y(K)-r(K)=0,PID输出的控制增量△u(K)=0,变频器输出频率不变,水泵转速不变,处于稳态运行。如图2中的0-t 1段。
(2)用水量增加时。
当用水量增加,用水需求Qu>供水能力QG,水压下降,压力反馈信号y(K)减少,偏差e(K)=y(K)-r(K)<0,PID输出的控制增量△u(K)>0,变频器输出频率上升,水泵转速升高,增加供水能力,最后达到一个新的平衡状态,使压力回复,维持供需平衡。这是一个动态变化的过程,在达到新的平衡状态之前,压力反馈信号Y(K)"偏差e(K),控制增量△u(K)均处于变化之中,其变化过程如图2中的tl-t3段,其中t2-t3段为增加用水量后新的平衡状态。
(3)用水量减少时。

图2 恒压喷灌PID调节过程
当用水量减少,用水需求Qu<供水能力QG,水压上升,压力反馈信号y(K)增大,偏差e(K)=y(K)-r(K)>O,PID输出的控制增量△u(K)<0,变频器输出频率下降,水泵转速降低,降低供水能力,最后达到一个新的平衡状态,使压力回复,维持供需平衡。这一动态变化过程,如图2中的t3-t4段,其中t4段以后为减少用水量后新的平衡状态。
3.3 变频器PID控制功能参数设置
变频器PID控制功能代码有,Pr.88,Pr.78,Pr.89,Pr.90、Pr.91,Pr.74共6个,通过对功能代码的设定来保证合理的PID运行
(1)PID模式预置。
Pr.88用以设置PID模式。
设定值20:PID反动作,21:PID正动作。其关系如图3所示。
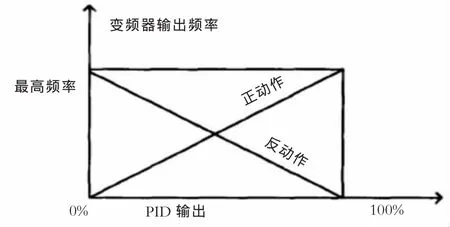
图3 PID模式
在供水系统中,当压力增大(即用水量减少),水泵的转速应下降,即变频器输出频率与被控量(水压)的变化趋势相反,所以选取模式20。
(2)反馈方式预置。
系统采取的是电流输入反动作,设定为Pr.78为20。
(3)压力目标值的预置。
压力目标值是一个比值,它和允许的管道压力大小及选用的传感器有关。其关系为:
压力目标值=管道允许压力/压力表量程×100%。
根据喷灌管网情况及水压需要,确定水泵出水口水压大小为0.5 MPa,选用的远传压力表量程是(0~1)MPa,则目标值为50%。
通过变频器键盘面板操作直接输入确定的压力目标值。
(4)P、I、D参数预置。
P、I、D参数通过Pr.89,Pr.90,Pr.91来设定。其中Pr.89用以设定P增益,设定范围;0.1999%;Pr.90用以设定积分时间,设定范围0.19995;Pr.91用以设定微分时间,设定范围(0.01~10.0)s。
P、I、D的取值与系统的惯性大小有很大的关系,在使用PID控制器时,一般不知道被控对象的数学模型,所以不可能用理论计算的方法来确定PID控制参数。但是比例、积分、微分部分都有明确的物理意义,可以根据控制器的参数与系统动态、稳态性能之间的定性关系,用试验的方法来调节控制器的参数,从而得到较为满意的结果。PID参数的整定可按以下总体原则进行。
Pr.89(增益P);在不发生振荡条件下增大其值;
Pr.90(积分时间I):在不发生振荡条件下减小其值;
Pr.91(微分时间D):在不发生振荡条件下增大其值;
用示波器监视压力表输出电压波形,根据波形情况来做参数调整,常见有下面几种情况:
a.抑制超调。
增大Pr.90(积分时间),减小Pr.91(微分时间),如图4a。
b.允许小量超调前提下加快响应速度。
减小Pr.90(积分时间),增大Pr.91(微分时间),如图4b。
c.抑制比Pr.90(积分时间)长的周期性振荡。
增大Pr.90(积分时间),如图4c。
d.抑制大约和Pr.91(微分时间)同样长周期的振荡。
减小Pr.91(微分时间)。设定0时,若仍有振荡时,减小Pr.89(增益P),如图4 d在PID功能有效且完成参数预置后,变频器完全按用户设定的P,I,D调节规律运行,其工作特点是:

图4 PID参数调节
●变频器的输出频率只根据水压实际压力大小与设定的目标压力的偏差进行调整,与实际水压大小并无对应关系。
●变频器的升、降速时间完全取决于由P,I,D值所决定的动态响应时间。
●变频器的输出频率始终处于调整状态,因此,其显示的数值常不稳定。
(5)反馈滤波时间预置。
设置对控制端子12输入的反馈信号的滤波时间,使PID控制系统稳定,设定值过大,反应变差。
4 结语
本研究是针对目前果树、蔬菜种植面积迅速扩大,而对其灌溉管理仍停滞在传统的大水漫灌或以自然降雨为主的现状提出的。目的是为了对果树、蔬菜适时、适量的科学灌溉,提高灌溉的均匀性和自动化水平,减轻劳动强度,节水节能。
1 常斗南.可编程控制器原理.应用.实验[M].北京:机械工业出版社,2002.
2 齐从谦、王士兰.PLC技术及应用[M].北京:机械工业出版社,2001.
3 张万忠、孙晋.可编程控制器入门与应用实例[M].北京:中国电力出版社,2006.
4 王永华.现代电气控制及PLC应用技术[M].北京:北京航空航天大学出版社,2003.
猜你喜欢
发明与创新(2021年39期)2021-11-05
装备制造技术(2021年2期)2021-07-21
数学物理学报(2021年2期)2021-06-09
数学物理学报(2019年5期)2019-11-29
测控技术(2018年1期)2018-11-25
广东技术师范大学学报(2016年5期)2016-08-22
通信电源技术(2016年5期)2016-03-22
中国煤层气(2015年3期)2015-08-22
哈尔滨师范大学自然科学学报(2015年1期)2015-04-19
冶金经济与管理(2015年1期)2015-02-28
