
基于NIOSⅡ的宽幅打印机多载体控制系统设计
2010-03-03 03:31孙海明冯平波
湖北汽车工业学院学报 2010年4期
孙海明,冯平波
(1.湖北汽车工业学院 机械工程系,湖北 十堰 442002;2.神龙汽车有限公司 襄樊工厂,湖北 襄樊 441000)
基于NIOSⅡ的宽幅打印机多载体控制系统设计
孙海明1,冯平波2
(1.湖北汽车工业学院 机械工程系,湖北 十堰 442002;2.神龙汽车有限公司 襄樊工厂,湖北 襄樊 441000)
针对宽幅打印机单一载体轴无法满足高效率打印的问题,设计了基于NIOSⅡ软核处理器的多载体自动控制系统,结合东芝TB6560AHQ步进电机驱动芯片,实现了3种载体的自动加卸载控制,给出了载体箱的原理图和控制流程图,提高了写真机的印前效率。
宽幅打印机;载体;TB6560AHQ;自动控制
宽幅喷墨式彩色打印机已在全球广告、图文和CAD等行业得到广泛应用,控制系统也已升级为嵌入式微处理器控制,其稳定性、打印精度和速度都有了极大的提高。与写真机的高精度和高速度相比,其印前和印后环节却相对落后。目前国内外写真机和喷绘机都只在机架上配置一根载体卷轴,不能同时存放和识别多种规格的载体,无法实现装载自动控制。
针对该问题,笔者设计了基于NIOSⅡ嵌入式软核处理器的多载体控制系统,实现了一次同时安装5种不同宽度的打印载体,并结合东芝公司的TB6560AHQ步进电机驱动芯片实现了下箱3根载体轴自动识别、加载和卸载。该自动控制载体箱独立于打印机单独工作,通用性强。
1 宽幅打印机工作原理
1.1 工作原理简介
宽幅打印机的工作原理与普通小型喷墨打印机类似,但打印载体的连续性和大幅面要求其控制系统的时序和稳定性更高,国产750型和1200型写真机系统结构如图1所示[1]。
写真机喷头横向运动由伺服电机带动打印小车并由光栅定位来实现,主要完成PC机既定图像的打印任务。小车横向移动速度和喷头固有点火频率决定着打印速度和精度。纵向运动依据喷墨打印时序由步进电机带动进纸轮来实现载体的步进供给,主要完成打印图像的有序排列,还原既定图像。用户通过操作面板上的载体进退按键使载体快进或快退,实现人工加载、卸载和更换当前载体。
1.2 单一载体轴的不足
目前,写真机使用的国产打印载体PP背胶纸有914 mm、1070 mm和1270 mm等3种常用宽度规格,另外有635 mm、1370 mm和1520 mm等3种不常用规格。实际打印过程中,为了节约成本,要依据画面宽度选择最为经济的载体,但由于国产和进口写真机在机架上都只配置一根载体存放轴,一次只能安放一种宽度规格的打印载体,因此实际打印工作中需要频繁更换载体。
频繁更换打印载体有3点不利:1)载体轴在上下机架时,容易弯曲变形,塑料齿轮容易磨损;2)最外圈的打印载体容易污染,导致材料浪费;3)更换载体需要1~2人配合完成,且需要移动打印机,比较麻烦。这种低效率的印前环节在一定程度上制约了宽幅打印机的高效生产。

图1 写真机系统结构图
2 控制系统组成与功能
写真机多载体自动控制系统由NIOSII嵌入式软核处理器、光电传感器、载体轴步进电机、载体输送步进电机、输送主被动轮和电磁铁等组成,系统结构如图2所示。
多载体自动控制系统主要实现4项控制功能:1)载体输送步进电机的启停和正反转,实现载体1~3的自动输送、加载和卸载;2)载体轴步进电机的启停和正反转,实现载体的预放和收缩;3)载体输送被动轮电磁铁的吸合,使打印载体而自由通过输送轮;4)人机交互操作和显示。
本系统选用NIOS II/S(标准型)型CPU,是Altera公司结合其FPGA推出的一款32位高性能RISC软核处理器,其内部包括512个通用寄存器,指令集简单完整,寻址模式较强,可扩展性和硬件加速性能良好。[1]本系统采用Cyclone II开发板,板载芯片为EP2C20F672C6,该芯片提供了4608~33216个逻辑单元,有475个管脚,能够满足系统需求和升级。

图2 载体自动控制系统结构图
3 控制系统硬件结构
3.1 载体箱结构
载体箱结构如图3所示,主要由上下箱体、5根载体轴、自动输送轮、载体引导板、传感器、支架和脚轮等构成。
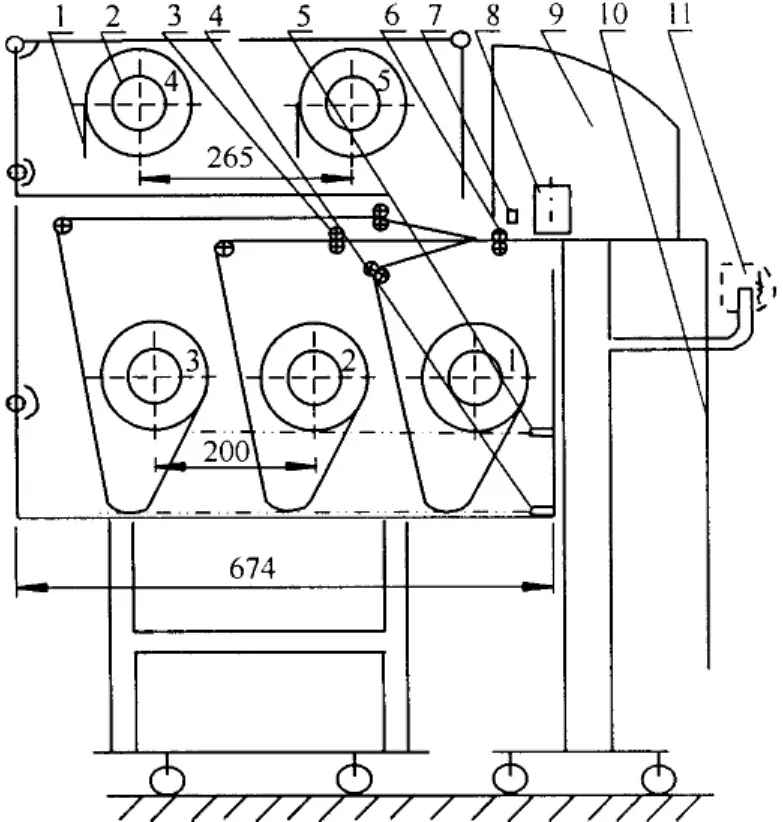
图3 载体箱结构及与打印机位置关系示意图
载体箱上下箱均采用折叠式箱门,箱门向后或向上开启后,可以方便的安放打印载体。上箱和下箱共有5根载体卷轴,下箱载体轴1~3由独立的步进电机控制,并配有独立的自动加载卸载送纸轮,上箱载体轴4和5应用较少,为手动控制。5根载体轴按照逆时针顺序编号,其安放位置、功能区分和规格定义上有所区别,如表1所示。
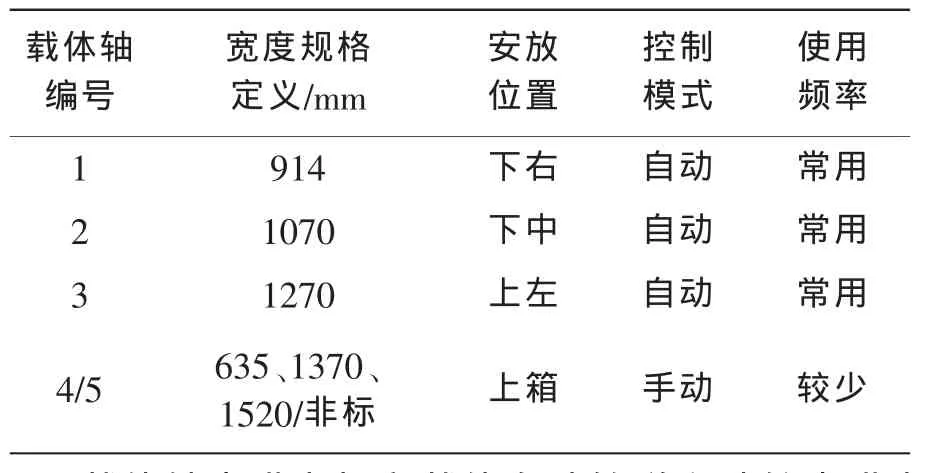
表1 载体轴功能定义表
载体轴步进电机和载体自动输送主动轮步进电机都选择北京斯达微步控制技术有限公司生产的57系列2相混合式直流步进电机,型号为57BYG096,原始步距角为1.8°,最大静扭矩为0.75 N·m,相电流3.0 A,机身直径为Φ57 mm,重量0.6 kg[2]。
3.2 载体轴步进电机驱动器
步进电机将电脉冲信号转变成角位移,其转角大小和方向由控制器控制。本控制系统的载体1~3自动输送主动轮分别由3个步进电机控制,要求与写真机进纸电机同步控制。经比较,选用东芝公司的TB6560AHQ驱动芯片,该芯片为HZIP25-P-1.27封装,使用BiCD工艺将低电阻与高许可损耗封装相结合,最大输出电流达到3.5 A[3],配合三选一互锁电路实现3个步进电机的分时控制,其电路图如4所示。
图4中,引脚3控制步进电机脉冲数量,引脚21控制旋转方向,二者共同控制步进电机的运动姿态。由自动加载过程可知,当载体从引导板达到写真机进纸轮后的短暂时间内,是由输送轮和写真机进纸轮同时输送的,2个步进电机的同步运动是保证载体平顺而不扭曲褶皱的必要条件,因此引脚3和引脚21的控制信号与写真机进纸步进电机控制信号相同。3根载体轴任何时候最多只有一根是被选择的,配合三选一互锁电路可以实现一个驱动器控制3台步进电机,使得控制系统经济实用。

图4 TB6560AHQ驱动步进电机电路图
4 控制系统软件设计
控制系统软件实现载体的宽度识别、自动加载、卸载、预放、收卷等控制,用7个变量来表示、控制或反馈当前状态,系统断电后该信息清零。载体轴存在有无载体、被选择和没有被选择3种状态,Z为1表示轴上有载体,XZ为1表示当前载体被选择。打印载体需要JA、JD、JF和JS 4个变量表示其当前位置。DG为1表示打印机送纸步进电机正向旋转,自动输送轮步进电机依据该信号实现正向选转,即图4中引脚21的信号,系统状态量符号如表2所示。
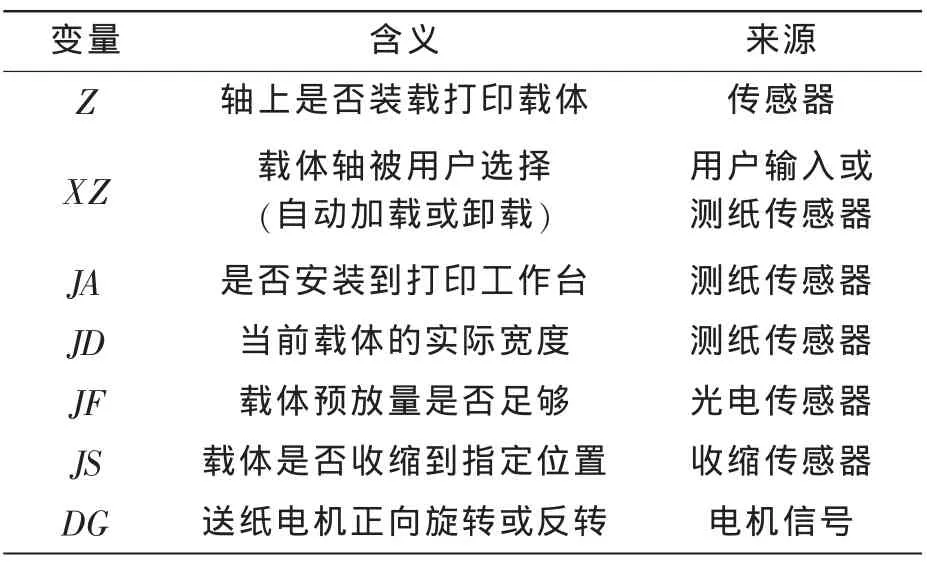
表2 载体轴和打印介质变量表
4.1 载体自动更换或人工选择的控制
载体自动更换是指用户通过控制面板选择了新载体,系统自动卸载当前载体并自动加载新载体的过程。这个过程系统需要知道打印平台上当前有无旧载体,以及新载体是否成功安放到载体轴上。如果当前打印平台没有载体,就是人工选择载体的过程。以图5为例说明选择载体1的过程。
系统首先判断将要安装的载体1如果已经在打印平台上(XZ1=1),显示该信息并维持现状。如果不是载体1,则有3种情况:当前载体是载体2或载体3或没有载体。无论是载体2或载体3,系统先执行自动卸载当前载体,然后自动加载载体1。如果当前没有载体,系统将直接加载载体1。如果载体轴2~3上没有安放载体(Z2=0),系统则不执行该载体的卸载动作,将直接自动加载载体1。

图5 人工选择或更换载体控制图
4.2 载体自动选择控制
载体自动选择是指依据打印平台当前载体的实际宽度,自动选择相应的载体轴,并考虑载体的宽度尺寸误差±4 mm。例如,当检测到载体实际宽度JD为913 mm时,程序判断后自动选择理论宽度为914 mm的载体轴1,程序控制取变量XZ1为1,XZ2、XZ3为0,流程如图6所示。
4.3 载体自动加载和卸载控制
载体自动加载是指载体从打印机进纸轮后方50 mm处的导引板上由输送电机送入打印平台的过程,其控制流程如图7所示。
测纸器检测到载体后JA为1,表示加载过程完成,之后,由打印机进纸轮独立完成载体的纵向补给任务直至打印完成。为了避免与输送轮不同步,系统控制被动轮电磁铁得电吸合,与主动轮分离3 mm使载体自由通过,被动轮从此开始起到载体引导作用,输送电机停止工作。卸载与加载过程相反,载体退出打印平台后,打印机进纸电机延迟0.1 s,保证载体退回到50 mm的位置。

图6 载体自动选择控制图
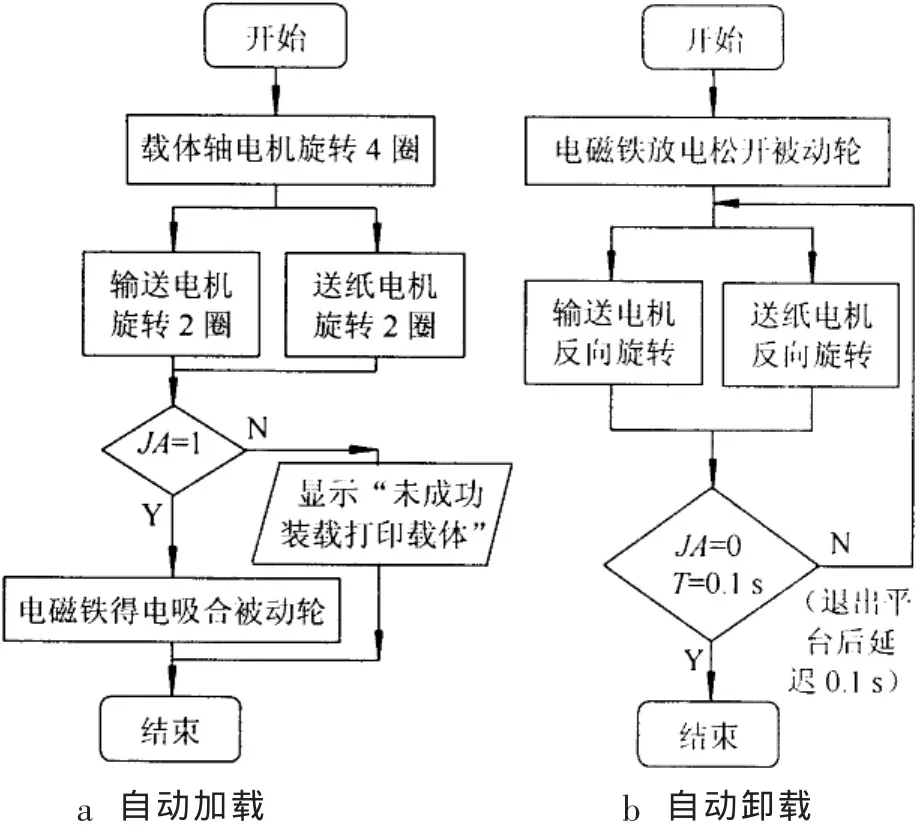
图7 载体自动加载和卸载控制图
4.4 载体自动预放和收缩的控制
自动预放是指为打印而预先准备300 mm的载体。避免载体轴电机持续动作,只有DG为1时,即打印正在进行或用户手动操作打印载体前进时,系统才循环执行自动预放命令,直到预放量达到系统设定的要求(JF=1)。当用户操作大量载体从平台退出打印机时,系统自动执行载体预收命令,此时,载体轴电机与打印机进纸电机同步反向旋转,避免载体堆积在导纸板上。当完成打印任务关机后,卸载后的载体需要收回预放量,起到防尘保护的作用,这就是载体自动收缩功能。此时,载体控制系统比打印机延迟60 s关机,载体轴电机反转直到JS为1,使载体收缩到合适位置,其控制过程如图8所示。
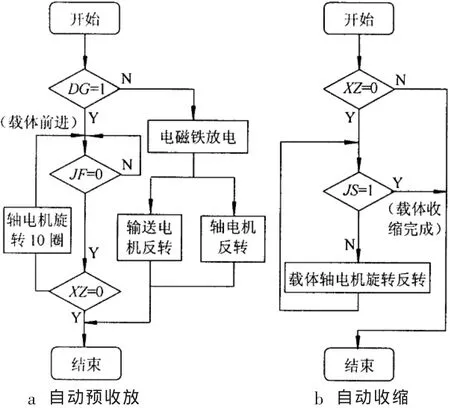
图8 载体自动预收放和收缩控制图
5 结束语
针对国产乐彩LC750型写真机的NIOSⅡ多载体控制系统样品已调试成功,实现了下载体箱载体1~3的自动识别、加载、卸载、预放和收缩等控制功能,极大的提高了印前效率和节约资源成本。对于不同品牌的宽幅打印机,需要调整多载体箱的高度,使引导板与打印平台等高,且自动送纸轮与打印机进纸轮直径相同。
[1]侯育萌.基于NIOSII的大幅面彩色喷墨写真机运动控制器设计[D].西安:西安电子科技大学,2008.
[2]北京斯达微步控制技术有限公司.57BYG096步进电机产品资料[EB/OL].[2010-10-25].http://www.startsh.net.
[3]TOSHIBA,Semiconductor Company.TB6560AHQ Stepping Motor Drivers IC[K].2009.
Design of Multi-roll-fed Control System for Wide Farmat Ink-jet Printer Based on NIOSⅡ
Sun Haiming1,Feng Pingbo2
(1.Dept of Mechanical Engineering,Hubei Automotive Industries Institute,Shiyan 442002,China; 2.Dongfeng Peugeot Citroen Automobile Company Ltd DUXF,Xiangfan 441000,China)
A multi-roll-fed control system was designed based on NIOSⅡprocessor.According to Toshiba TB6560AHQ stepping motor drivers IC,automatic load control and unload control of three types of print paper were achieved.The schematic diagrams of box and control flow chart were given.
wide format ink-jet printer;print paper;TB6560AHQ;automatic control
TP311
A
1008-5483(2010)04-0039-05
10.3969/j.issn.1008-5483.2010.04.010
猜你喜欢
航天返回与遥感(2022年1期)2022-03-09
上海公路(2017年2期)2017-03-12
发明与创新(2016年34期)2016-08-22
中国塑料(2016年7期)2016-04-16
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27
橡胶工业(2015年4期)2015-07-29
医学研究杂志(2015年5期)2015-06-10
人生十六七(2015年5期)2015-02-28
城市道桥与防洪(2014年11期)2014-02-27
销售与市场·管理版(2009年21期)2009-09-03
