客车用AFS偏转规律研究
2010-01-08 00:41郑尧刚张卫波
海峡科学 2010年12期
郑尧刚 张卫波
客车用AFS偏转规律研究
郑尧刚 张卫波
福州大学机械工程及自动化学院
自适应前照灯系统(AFS)能够自动改变光线射向以适应车辆行驶条件变化,是目前国际上车灯照明领域最新的技术之一。在这一背景下,本文对自适应前照灯系统的偏转规律进行了深入的研究,结合在厦门金龙XMQ6117Y3型号客车上的应用情况,详细分析了自适应前照灯水平转动和俯仰调整的规律,对自适应前照灯系统在客车上的应用具有一定的参考价值。
AFS;偏转规律;客车
自适应前照灯系统(AFS)偏转规律主要由左右水平转角偏转规律和俯仰偏转规律2部分组成[1]。左右水平转角偏转规律为车辆在弯道行驶中前照灯左右偏转角度与前内侧轮转角和车速的关系,前照灯的左右水平偏转有利于增强弯道照明效果,消除视觉“盲区”;俯仰偏转规律为车辆在行驶过程中,前照灯倾斜角度与车速、车身俯仰角度和车身跳动的关系,前照灯的俯仰偏转有利于增加照射距离,提高照射强度或扩大视野,提高汽车行驶的主动安全性。偏转规律的研究将为后续前照灯自适应控制系统的实现奠定理论基础[2]。客车与轿车的偏转规律的最大区别在于两者间的前悬和轴距等尺寸的差别,在轿车上前悬相对较小可以忽略,而客车的前悬相对较大,因此客车的前悬在进行AFS系统偏转规律分析时不可忽视。
1 AFS左右水平偏转规律分析及模拟
本文在考虑客车前悬参数的基础上,在实现前照灯左右转动时,选择前轮转角作为输入信号,并考虑速度信号的影响[3]。这是因为在弯道转弯半径一定的情况下,由于客车不足转向的影响,导致在转弯半径一定的条件下,客车行驶速度越大,如果要顺利转弯的话,就必然要增加前轮转角,从而速度信号也间接地影响了前照灯的左右偏角,它们的关系如式(1)所示
左右偏转控制策略为使内侧前照灯光轴中心线与前内侧车轮转弯半径相切,如图1所示,建立前照灯左右转角与前轮转角的数学模型,实现前照灯左右偏转控制。外侧前照灯的偏转角度为内侧前照灯偏转角度的一半。根据阿卡曼原理建立前照灯转向数学模型,分析内外侧前照灯左右水平偏转规律。



本文选择厦门金龙的XMQ6117Y3型客车作为分析对象,通过MATLAB模拟前轮转角与前照灯转角的关系,发现前轮转角与前照灯的偏转角度几乎成线性关系,因此本文假设前轮转角与前照灯左右偏转角度成线性关系,简化上述的数学模型,如式(4)所示,再通过MATLAB/simulink分析2种模型的差值,验证该线性模型的可行性。

通过比较推导模型与简化模型之间的差值,结果如图2所示。

图2 推导模型与简化模型的差值
这2种控制策略的差值很小,在前轮转角为5°左右,其差值最大接近0.1°,而0.1°的误差在前照灯的控制规律上是很小的,可以忽略不计。因此我们可以将式(4)简化成关于前内侧车轮转角的一次函数。通过模拟计算得出对应本车型XMQ6117Y3的值,其大小为2.4。在忽略助力转向功能的影响,即前轮与方向盘转角成线性关系条件下,本文的前照灯左右控制规律为
2 AFS俯仰偏转规律分析及模拟
当车辆的运动状态改变时,例如:加减速、高低速行驶、后座有乘客乘坐、转弯时都会对前照灯的照明效果产生影响[5]。在保证路前方照明的同时,避免对前方来往车辆造成炫目,这就要求车辆在动态运动过程中,自适应前照灯系统能够根据不同的运动状态,自动调整前照灯的俯仰角度,使其在垂向方向上维持在一定的照射范围,例如:车辆高速行驶时,为了及时发现前方路况信息,要求前照灯角度上扬一定角度;后座有乘客或加速时,造成车身上扬,为了避免对来往车辆产生炫目效果要求前照灯角度下倾一定角度。
在保证照明的同时避免造成炫目,本文根据汽车七自由度模型,如图3所示,分析车身跳动、俯仰运动、侧倾运动及速度变化对前照灯垂直运动的影响。采用的策略是:使得客车在运动前与运动后前照灯光束照射距离一致,如图4所示,建立俯仰运动,侧倾运动,车身跳动及速度变化下的前照灯垂直运动数学模型。
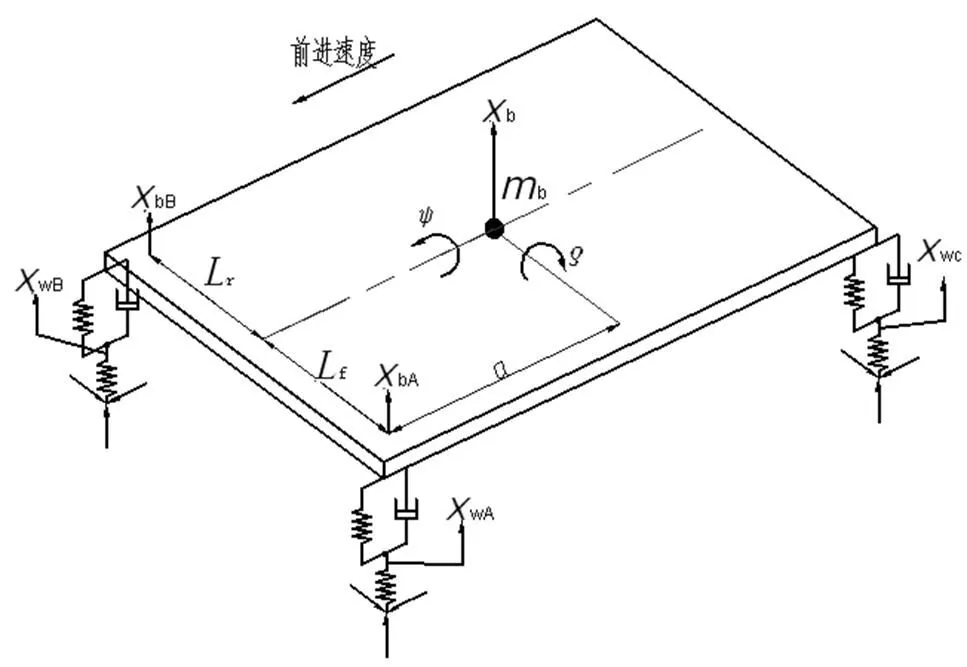
图3 七自由度模型
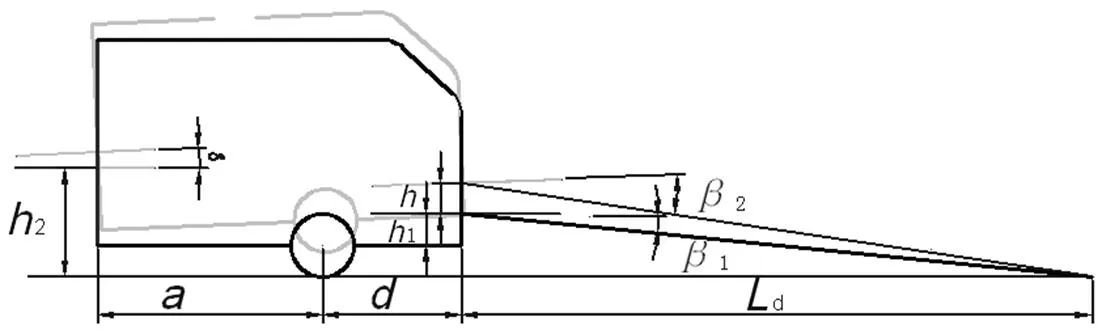
注:a——质心到前轴距离;d——前悬长度;Ld——前照灯安全照射水平距离;h1——前照灯安装高度;h2——心高度; h——前照灯实际变化高度;——车身俯仰角度;——车身水平时对应的前照灯照射角度;——俯仰状态下对应的前照灯照射角度
俯仰运动对应的前照灯俯仰调整角度数学模型:

侧倾运动对应的前照灯俯仰调整角度数学模型:

车身跳动对应的前照灯俯仰调整角度数学模型:

速度变化对应的前照灯俯仰调整角度数学模型:

将上述四种工况下的俯仰调整角度数学模型进行线性相加,得出四种运动变化同时作用时对应的前照灯俯仰调整角度数学模型:

根据式(7),式(8),式(9)和式(10)建立MATLAB仿真模型,比较各个控制信号单独作用时对前照灯俯仰调整影响的关系,仿真结果如图5所示,为简化控制模型提供参考。
从图5可以很明显地看出,车辆在动态变化过程中,俯仰运动对前照灯的调整角度影响最大,速度变化对前照灯的调整角度影响也比较大,而车身跳动和侧倾运动对前照灯的俯仰角的影响则较小,可以忽略不计。本文假设车辆在空载情况下,车灯的安装高度为750mm,初始下倾角为15%(0.86°),分析车身跳动到最大值且侧倾运动到最大值时,即侧倾角为+3°且车身跳动值为200mm的状况下,其调整角度约为0.3°。此时的下倾角极限为:


根据国标GB4599-2007关于下倾度值的规定[6]:极限:-0.5%~-2.5%,可知:在忽略车身跳动和侧倾运动2个控制信号的影响下,前照灯的下倾角度仍可满足国标要求,因此本文将只探讨俯仰运动和速度变化这2个情况下前照灯的俯仰调整情况,故将前照灯俯仰偏转规律简化为

其中,若调整角度结果为正时,表明前照灯向下调整即前照灯的照射方向与水平轴方向的夹角比初始角度增大;若调整角度结果为负时,表明前照灯向上调整即前照灯的照射方向与水平轴方向的夹角比初始角度减少。
3 结语
本文针对厦门金龙XMQ6117Y3型号客车研究适合客车AFS系统的偏转运动规律,提出简化模型,利用MATLAB/simulink进行实车数据仿真,仿真结果表明:前轮转角与前照灯转角的关系几乎成线性关系,推导模型与简化模型的差值在误差范围内,可以忽略不计,简化了控制策略;通过建立7自由度整车模型,分析车辆的俯仰运动,侧倾运动,车身跳动以及速度变化对前照灯照明的影响,分别建立单控制信号下前照灯对应调整角度关系,利用MATLAB/simulink进行实车数据仿真,仿真结果表明:侧倾运动,车身跳动值这两个控制信号对前照灯下倾角度调整影响较小,在忽略的情况下可满足法规GB4599-2007的规定,从而简化控制信号建立在小角度俯仰状态下的前照灯俯仰调整规律,为自适应前照灯系统的俯仰调整规律提供参考依据。
[1] AFS专论1·AFS自适应前照灯系统简介[EB/OL] [2009.4.10]http://hi.baidu.
com/dingshikeji/blog/item/7d9d194a77dcc12508f7ef5a.html
[2] 盛敬,林谋有.智能前照灯系统(AFS)研究现状综述[J].拖拉机与农用运输车,2007(12):18-19.
[3] 房旭,姚勇. 智能汽车前照灯系统(AFS)研究[J].汽车技术学报,2006(4):17-20.
[4] B. Rudolf, J. Schmidt, M. Grimm.INTEGRATION OF AFS-FUNCTIONALITY
INTO DRIVING SIMULATORS.HELLA and RENAULT.DSC 2004 Europe [R].Paris , September 2004.
[5] 陈建林,吴青,初秀民,等.汽车AFS系统车灯转角动态模型研究[J].2008第四届中国智能交通年会论文集[C] .武汉: 武汉理工大学,2008.
[6] 戎辉,龚进峰,曹键.AFS系统关键技术研究.汽车电器[J].2008(5),15-17.
[7] M. Canry, S. Cherfan, P. Lecocq.Application of real-time lighting simulation for intelligent front-lighting studies.[J].RENAULT and VALEO Lighting Systems,2004
[8] Yutaka Nakata, Projector-Type Head Lamp for Vehicles [P]. United Stated patent: 4943894 -1990.
Research Of the Deflection Law Of AFS In Coach
Zheng Yaogang ,Zhang Weibo
(College of Mechanical Engineering and Automation, Fuzhou University, Fuzhou 350108, China)
Adaptive Front-lighting System(AFS)can change the lighting automatically to adapt the changes in traffic conditions, which is one of the latest technology in lamp lighting in the world. This paper has a intensive research about the rotation deflection law of AFS in the coach in detail, which provides a reference for the application of AFS in the coach.
AFS, the Deflection Law , coach.
猜你喜欢
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
汽车观察(2019年2期)2019-03-15
汽车观察(2018年12期)2018-12-26
汽车观察(2018年10期)2018-11-06
汽车维护与修理(2018年7期)2018-10-13
北京汽车(2017年3期)2017-10-14
解放军健康(2017年5期)2017-08-01
汽车维护与修理(2016年4期)2016-11-26
知识经济·中国直销(2016年2期)2016-11-07
探测与控制学报(2015年4期)2015-12-15