智能前照灯弯道照明试验方法研究
2009-10-26 03:02张叶亮王佳怡
中国汽车市场 2009年8期
张叶亮 王佳怡
智能汽车前照灯系统(AFS)
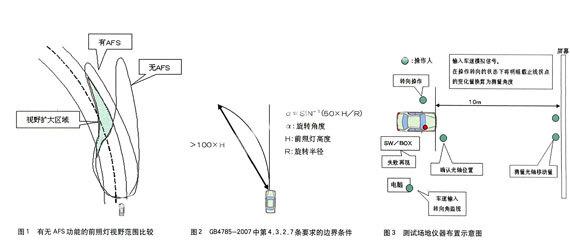
智能汽车前照灯系统(AFS)是指可以根据行驶环境自动改变前照灯配光形式的系统。为了照射行进方向,该系统能在转弯行驶时让前照灯旋转或点亮补充光源,在交叉路口和弯道上进一步提高前方的能见度。近光的照射光线与转向角和车轮速度连动,可以左右水平移动。有AFS功能的前照灯较无AFS功能的前照灯能有效扩大视野范围,能更好地保证驾驶员在夜间看清前方弯道处的道路。(见图1)
GB4785—2007《汽车及挂车外部照明和光信号装置的安装规定》对弯道照明的要求
由于有AFS功能的前照灯可以形成弯道照明,近光灯可以在水平方向移动,但若水平移动量过大,会使对方车道的其他驾驶者产生眩目,从而引发交通事故。
为了避免出现上述情况,GB4785-2007中第4.3,2.7条对近光灯水平方向提出了要求:“为了形成弯道照明,可以改变一只或二只近光灯的水平方向,但是当移动整个光束或明暗截止线弯曲肘部时,明暗截止线弯曲肘部不得与在离车辆前部的距离为相应近光灯安装高度100倍的车辆重心的轨迹相交。”(见图2)
近光灯光轴转向角度测量方法研究
1指导思想
由于车辆进入弯道中的行驶状态各不相同,车辆的行驶速度,方向盘转向的角度,车辆转弯半径等均为变量,故实际近光灯光轴转向的角度等也为变量。此外,车辆在行驶过程中是无法对实际近光灯光轴转向的角度进行测量的。
近光灯光轴转向的角度是由该时刻车辆的行驶速度、方向盘转向的角度、车辆转弯半径等来决定的,如果能向行车电脑输入这些车辆动态参数便可以使近光灯光轴转向,并保持对应输入动态参数的一个确定转向角度。这样就能在实验室中用静态检测的方法测量出车辆在行驶环境中近光灯光轴的转向角度。
根据前照灯基准高度及输入的车辆旋转半径即可计算出在边界条件下标准允许的最大旋转角度。
在计算出标准允许的近光灯最大旋转角度并测量出实际转向角度后,即可对近光灯水平方向旋转角度是否符合GB4785-2007中第4.3,2.7条的要求进行判定。
2、车辆动态参数输入
输入动态参数使试验样车在低速及中高速行驶状态,分别对左右二侧前照灯进行模拟。此时前照灯的光轴发生偏转,分析软件显示出随着方向盘转角增加前照灯光轴转角增加的关系及随着方向盘转角减少前照灯光轴转角减少关系的曲线图。从车辆信号模拟图上可知,左右近光光轴旋转的角度是不同的。一般驾驶员侧近光变化角度最大为20°,乘员侧为10°。
3静态检测
在用车辆信号模拟仪得出前照灯光轴转角与不同车速和方向盘转角的对应关系后,测试前照灯光轴的实际偏转角度。测试场地仪器布置及前照灯光轴的实际偏转角度测试如图。(见图3)
按照以下步骤计算前照灯光轴的实际偏转角度;
(1)将车速信号、转向角信号输入输入器(按形式确定);
(2)确认光轴已经旋转;
(3)将激光指示器对准旋转后的明暗截止线拐点A′;
(4)测量移动量(A—A′距离);
(5)确认弯头点A′、激光指示器的位置;
(6)将旋转量转换为角度计算公式:旋转角度=ATAN(移动量/10000)。
4用标准要求的边界条件进行分析计算
(1)在寓车辆前部相当于近光灯安装高度100倍以上的地方,不得交叉车辆重心轨迹线
(2)边界计算公式:α≤SIN(50×H/R)
(3)α:允许前照灯光轴旋转的最大角度;H:前照灯基准高度; R:对应车速及方向盘转角下的车辆转弯半径;
(4)将实际测量的前照灯光轴旋转角度与α比较,进行判定。
试验实例
通过对智能前照灯弯道照明试验方法的研究,形成用车辆动态参数输入结合静态检测的方法对近光灯光轴转向角度进行测量。表1,表2为某一品牌轿车的智能前照灯弯道照明的检测结果。
结论
随着越来越多的车辆配备智能汽车前照灯系统(AFS),如何对该系统的弯道照明功能按照国家标准的要求进行检测,这对相关检测机构提出了要求。本文通过研究用车辆动态参数输入结合静态检测的方法,解决了前照灯弯道照明无法进行动态检测的问题,对检测机构建立起该项目的检测能力具有重要意义。
猜你喜欢
花火·绘阅读(2021年4期)2021-09-10
小资CHIC!ELEGANCE(2019年20期)2019-07-02
汽车科技(2018年5期)2018-12-08
当代工人(2018年16期)2018-12-01
新传奇(2018年47期)2018-08-09
中国建筑金属结构(2018年4期)2018-05-23
华人时刊(2014年6期)2014-07-25
辽河(2009年3期)2009-05-04
中国市场(2004年9期)2004-09-23