智能车参赛设计技术报告(节选)
2009-09-24 10:05李嵩孙文静瞿佳璐
电子产品世界 2009年9期
李 嵩 孙文静 瞿佳璐
摘要:车模的图像是车模稳定性的关键,机械部分是速度的关键,优良的辅助调试系统是高效率调试的前提,而其它的控制、驱动、决策等部分在以上部分良好的前提下,则显得相对次要本次车模的制作目标应着重提升机械性能,并提高图像质量。
关键词:智能车;摄像头;偏振镜;图像采集
车模的机械部分是影响其行驶性能最直接的部分,其重要性不言而喻。一个不良的机械系统会增加控制的难度。会为车模的速度提升带来障碍。因此,车模的机械性能应该是优先考虑的问题。
摄像头的安装
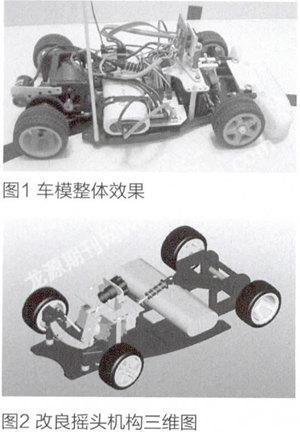
大量事实证明,重心越低越好。为降低重心,并同时保证图像视野宽度,最好的方法就是使用旋转摄像头。在08年的第三届比赛中,摄像头一舵角连动机构在Racerx的车上取得了出人意料的成效,但也暴露出了一些机构固有的问题,其中包括:机构虚位导致摄像头定位不准,摄像头在中位附件容易振荡。因此需要对机构进行改良。改良方法如下。
(1)增加自动回正机构,给旋转摄像头提供自动回正力矩、以减小机构虚位。
(2)给旋转摄像头机构调静平衡,减少车模在过弯过程中离心力对摄像头的影响。
(3)用滑槽代替原本中间的连杆球头,为旋转摄像头在中位附近制造一段死区,使车模在打小角度舵角时,摄像头不转,从而增加车模在直线和小s弯中的稳定性。
改良的机构三维图如图2所示。
综上所述,这是一个带有死区及自动回正机构的旋转摄像头机构。此外,在控制方面,可以设法检测出摄像头旋转的角度,并将其反馈在控制算法里。检测摄像头角度的方法大致有以下两种:
(1)在车头划线做标记,用摄像头检测车头标记,来判断自己所转的角度。

(2)由于舵机s3010是模拟舵机,其中是用电位器来反馈舵角的,因此可以将此电位器的信号飞线引出来,用单片机内部AD进行采集。
偏振镜的使用
由于追求更好的机械性能,我们把摄像头降低,达到降低重心的目的。但是由此带来了反面的影响,那就是图像的形变以及受到跑道面反光的影响。跑道上的黑线由于反光原因,摄像头检测的数据丢失黑线。为了解决反光导致检测不到黑线的问题,我们利用了偏振镜。偏振镜的作用其实是过滤掉某个角度的偏振光,实现检偏的作用。当自然光经过跑道面以后,会产生偏振光,这反射的偏振光会影响到图像的采集。通过在摄像头前面安装偏振镜片,并且调整偏振镜片的检偏角度,可以得到几乎无反光影响的图像。如图3所示。
不过,使用偏振镜也会带来问题。虽然偏振镜能把跑道的偏振光过滤掉,但同时把环境的自然光强度降为原来光强的二分之一,也就是说通过偏振镜之后光线变暗了。在光线强度较大的时候不会有太大影响、但是如果环境光比较弱的时候,加了偏振镜会使摄像头感应的光线更弱。而大多数摄像头具有自动曝光功能,在光线昏暗时,摄像头会自动增加曝光时间,导致图像更容易模糊。因此,使用偏振镜要合理权衡利与弊才能发挥偏振镜的作用。

图像采集模块
清晰稳定的图像是一切的基础,因此今年我们在摄像头选择和多种采集方案的测试上花了很多功夫。
摄像头选择
由于CMOS摄像头重量轻、功耗低,因此依然十分有吸引力,所以我们对CMOS与cCD再次进行对比测试,测试用的CMOS摄像头为康美迪亚的1/3 CMOS,图4为CMOS摄像头与CCD摄像头的原始图像,可以看到CMOS图像中的噪点远远多于CCD的图像。并且CMOS摄像头在拍摄运动图像时容易发生模糊。
动态图像模糊主要是在光线较暗的环境下,为了保持图像亮度,摄像头自动将曝光时间增大所致。要彻底避免图像模糊情况的出现,就要手动设置摄像头曝光时间,于是我们又测试了1/3数字摄像头OV7620、通过SCCB将摄像头设置到手动模式,手动修改其曝光时间。
图像采集方案
今年我们测试了很多种采集方案,首先由于更换了主频更高的s12XS128,我们对其内部AD又进行了测试,结果很失望,尽管主频增高。最高精度从10bit增加到了12bit,但是AD的转换时间并没有多少改善,88MHz主频下行像素在80左右。之后我们又测试了外部二值化采集、数字摄像头采集、外部AD加LM1881采集、视频解码芯片采集。其中视频解码芯片图像质量最好,并且有图像预处理电路,但由于实验电路还在测试阶段,本次比赛并没有启用,仍然延用了去年的外部AD采集方案。

电机驱动横块
去年我们使用S14430,模仿电子调速器制作了驱动电路,取得了不错的效果,但是对于能耗刹车的刹车能力始终存在争议,因此我们对能耗刹车和反压刹车做了对比测试。
参考第三届上海交大SpeedStar队的技术报告,我们使用BTS7970制作了驱动电路,其原理如下。该电路有一路PWM输入,两根I/O线作为模式选择线,可以有正转、反转、能耗刹车三种工作模式。
我们使用“白骑士”模型车的驱动电路与上述电路(图5)进行对比测试,图6是车模的速度曲线,其中浅色的线为给定速度,深色的线为实际速度,纵坐标单位为mm/s,横坐标单位为帧(即40ms)。
比较以上速度曲线,两种驱动在加速能力上相差不大,而反压刹车的减速能力远高于能耗刹车。因此,可以得出结论,对于比赛所提供的380电机而言,10mΩ左右内阻的驱动电路已经足以满足要求,反压刹车的效果是远好于能耗刹车的,而用BTS7970制作驱动电路是一个简单易行方案。
SD卡
SD卡宴时存储系统是我们去年率先提出和使用的辅助调试手段,极大地提高了调试效率,今年我们继续延用并对sD卡存储的速度和稳定性做了改进。去年我们使用的MC9S12DG128,在设计之初主要考虑到SD卡为3.3V系统,而单片机为SV系统,之间需要逻辑电平转换,为此我们在设计SD卡电路时在单片机输入端加了三极管放大。今年我们使用的MC9S12XSl28可以支持3.135V到5.5V的宽电压供电,我们使用3,3V供电就可以实现与SD卡接口的直连,这样可以提高读写SD卡的稳定性。
点评:该队在摄像头中的偏振镜的使用及图像采集模块、SD卡、电机驱动模块等部分比较有特色。设计充分利用组委会提供的硬件,在一定程度上发挥了飞思卡尔产品在处理能力上的优势,并通过几届大赛经验总结,有效提升了赛车的性能。指导教师:陈万米,蔡庆楠
猜你喜欢
东方少年·布老虎画刊(2023年5期)2023-06-14
中国交通信息化(2022年9期)2022-10-28
汽车工程师(2021年12期)2022-01-18
电子测试(2018年13期)2018-09-26
网络与信息(2009年8期)2009-05-10