
基于HIP4081的厚膜H桥电机驱动电路设计
2009-03-02 09:33刁小玲
现代电子技术 2009年4期
刁小玲
摘 要:为了实现小体积、高可靠的电机驱动与控制,利用HIP4081专用芯片和ALN厚膜混合集成技术,设计一种基于HIP4081的厚膜H桥电机驱动电路,完成了H桥式驱动电路对电机双向转动和调速的控制。经实际应用,该电路不仅安全可靠地实现了电机的双向转动和调速功能,且产品体积小,导热性能好,效率高;还能在恶劣的使用环境下安全工作,提高了驱动电路和系统的可靠性,适合军、民两用。
关键词:HIP4081;H桥;ALN;厚膜混合集成
中图分类号:TP274 文献标识码:B 文章编号:1004-373X(2009)04-008-03
Hybrid Integrated Technology H Bridge Motor Driver Based on the HIP4081
DIAO Xiaoling
(Shenzhen Zhenhua Microelectronics Co.Ltd.,Shenzhen,518057,China)
Abstract:For carrying out a small physical volume and high reliability of the motor driving and control,by using HIP4081 chip and ALN hybrid integrated technology,a hybrid integrated technology H bridge circuit based on HIP4081 is designed to control bidirectional circumrotation and speed regulation of the motor.By practical application,the bidirectional circumrotation/speed adjustment of motor are realized safely and reliably.The products has a small physical volume,fast heat transmission,high efficiency and can operate properly in severe environment.It can enhance the reliability of the drive circuit and the system,and adapt to both military and commercial usage.
Keywords:HIP4081;H bridge;ALN;hybrid integrated circuit
随着电力电子技术的进步和微处理器技术的应用,大大改变了电机控制、电气传动的面貌。形成了一门多学科交叉的“运动控制”技术。运动控制系统能使被控机械运动实现精确的位置控制、速度控制、加速度控制、转矩或力的控制,以及这些被控机械量的综合控制。H桥驱动电路能与主处理器、电机等构成一个完整的运动控制系统,可应用于步进电机、交流电机及直流电机等的运动控制。
1 电机运动控制及其驱动电路
在电机的运动控制中,最常见的是电机的双向转动和调速,流经电机绕组的电流大小和方向要受控。
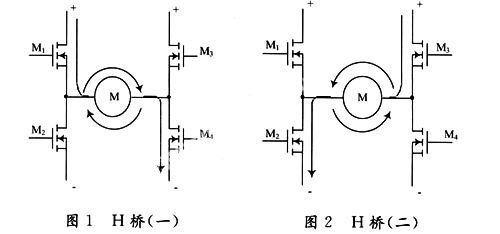
图1,图2是由4个N沟道MOS管(M1~M4)和一个电机(M)组成的H桥。在图1中,当M1和M4导通时,电流从电源正极经M1从左至右穿过电机,然后再经M4回到电源负极,电机沿顺时针转动。在图2中,当M3和M2导通时,电流从右至左流过电机,电机沿逆时针转动。因此,通过调整MOS管的导通与截止时序可以控制电机的转向,通过调整流经电机电流的大小可以控制电机的转速。
在此介绍一款基于HIP4081设计的厚膜H桥电机驱动电路,用于某炮瞄系统。电路内部集成了CMOS控制电路和由MOS管组成的H桥,它能为负载提供5 A的连续电流。该电路能在60 V的供电电源范围内安全工作,用户只需提供与TTL电平兼容的PWM信号就可进行4象限模式的幅值和方向同时控制,而且与数字控制器的接口非常简单。其内部电路可提供适当的死区时间间隔以保护H桥的4个N沟道场效应管,效率可达97%。提供有与TTL兼容的使能管脚来关断4个场效应管。
2 HIP4081内部结构及技术特点
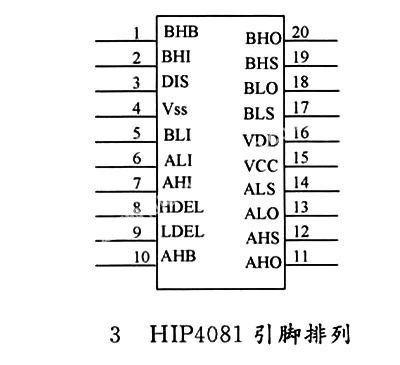
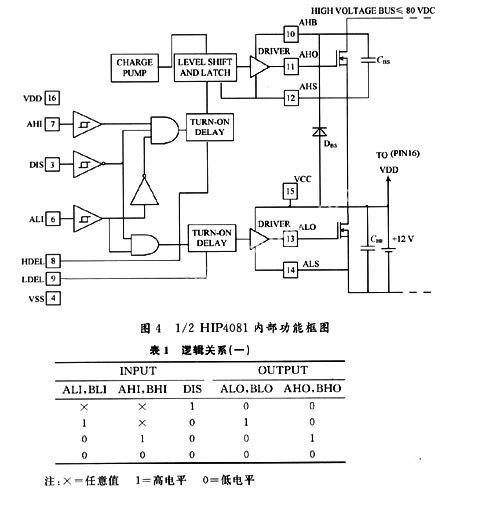
HIP4081是intersil公司推出的一款专门用于控制H桥的高频全桥驱动芯片。采用闩锁抗干扰CMOS 制造工艺,具有独立的低端和高端输入通道,分别独立驱动4个N沟道MOS管;输出峰值电流为2 A;芯片内部具有电荷泵和死区时间设置;悬浮电源采用自举电路,其高端工作电压可达95 V,逻辑电源电压范围6~15 V,工作频率高,可达1 MHz;具有能控制所有输入的禁止端,可方便地与外接元件形成保护电路。图3给出HIP4081的引脚排列定义,图4显示了1/2 HIP4081(A边)的内部功能框图。主要组成部分有:逻辑输入、使能、电荷泵、电平平移及死区时间设置等。
在图4中,ALI,AHI分别是A边的低边输入和高边输入;ALO,AHO分别是A边的低边输出和高边输出,DIS是使能输入;在另一半(B边)的内部功能图中,BLI、BHI分别是B边的低边输入和高边输入;BLO,BHO分别是B边的低边输出和高边输出。他们之间的逻辑关系如表1所示。
3 电路实现基本原理
电路原理框如图5所示。
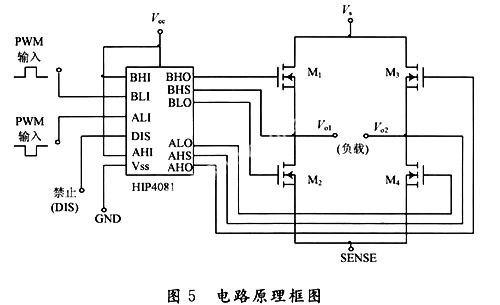
在图5中,Vcc为内部逻辑电路和MOS管上臂和下臂驱动器的低压电源;Vs为H桥供电电源,MOS管从这个电源端获得输出电流,该脚电压范围为Vcc~+80 V;猇o1为半桥的输出脚1,当PWM输入ALI为高,BLI为低时,该脚输出为Vs;Vo2为半桥的输出脚2,当PWM输入ALI为低,BLI为高时,该脚输出为Vs;SENSE为2个半桥下臂的共同联接点,可连接一个到Vs地的检测电阻以检测电流,该脚也可以直接连到Vs的地。GND为输入逻辑和Vcc的地;PWM输入为用于输入与TTL兼容的PWM信号,占空比在0%~100%之间;DIS为用于关断4个MOS管,该脚为1时为关断,为0时使能。
3.1 电路工作逻辑时序及电机运动状态分析
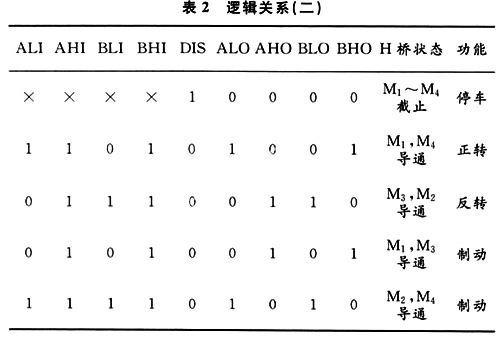
在图5中,当使能端DIS处于高电平“1”时,无论ALI,BLI是“1”还是“0”,ALO,BLO,AHO,BHO都为“0”,电路处于禁止状态,电机停转。 当使能端DIS处于低电平“0”时,ALI和BLI可通过反相器分别同时接收PWM信号的高电平“1”和低电平“0”。当ALI为1,BLI为0时,此时,ALO为1,AHO为0,BLO为0,BHO为1,H 桥中的MOS管M1与M4导通,H桥处于图1状态,电机顺时针旋转。当ALI为0,BLI为1时,此时,ALO为0,AHO为1,BLO为1,BHO为0,H桥中的MOS管M3与M2导通,H桥处于图2状态,电机逆时针旋转。 当ALI,BLI同时为0时,ALO,BLO都为0,AHO,BHO都为1,电机中没有电流流过,处于制动状态。 当ALI,BLI同时为1时,ALO,BLO都为1,AHO,BHO都为0,电机中也没有电流流过,同样处于制动状态。其逻辑关系如表2所示。
3.2 死区时间的考虑
在图5中,保证H桥上2个同侧的MOS管(M1和M2,M3和M4)不会同时导通非常重要。如果MOS管M1和M2(或M3和M4)同时导通,那么电流就会从电源Vs正极穿过2个MOS管直接回到负极。此时,电路中除了MOS管外没有其他任何负载,因此电路上的电流就可能达到最大值(该电流仅受电源性能限制),甚至烧坏MOS管。基于上述原因,在实际驱动电路中要使M1与M2或M3与M4在导通时间上有一个延迟,也称死区时间。
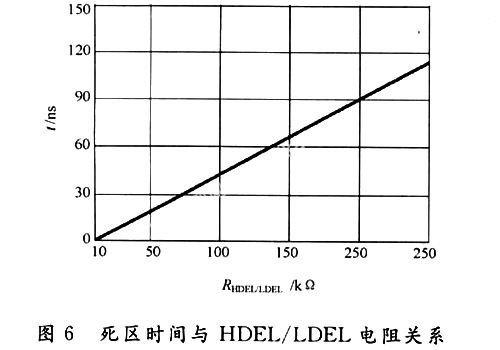
HIP4081留有HDEL和LDEL两个端口(见图4),用户通过外接电阻,可根据实际电路工作情况,自行定制死区时间。死区时间与HDEL/LDEL电阻的关系如图6所示。
3.3 效率的考虑
在图5中,决定驱动电路效率的主要是以下3个因素:HIP4081的静态功耗;Vcc电源的动态功耗;MOS管的I2R损耗。
由于HIP4081是CMOS器件,第(1)项损耗很小,可忽略不计,第(2)项损耗虽然大一些,但远小于(3)项(尤其是满负荷输出时)。而MOS管的I2R由其导通电阻决定,因此选择合适的MOS管组成H桥电路,可以减少(3)项损耗。该电路选用N沟道HEXFET Power MOSFET IRFP250N,其导通电阻为0.075 Ω,降低了导通损耗,提高了效率。
3.4 产品结构的考虑
(1) 该产品结构采用厚膜混合集成技术设计,如图7所示,在具有高导热率的AlN陶瓷基板上通过厚膜印烧工艺制作厚膜基板,并通过基板金属化与焊接技术,将ALN基板与金属外壳进行焊接,大大提高了电路的导热能力和功率密度。
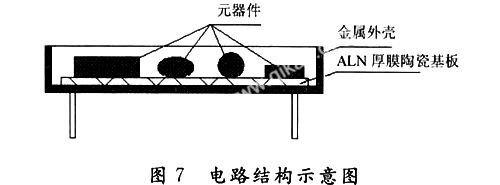
(2) 在图7中,产品内部全部有源器件采用裸芯片,通过混合集成电路的二次集成工艺技术,将元器件、ALN厚膜陶瓷基板以及金属外壳组装在一起。形成具有全密封金属外壳、外形尺寸为32 mm×32 mm×7 mm的双列直插式厚膜混合集成产品,大大缩小了体积,减少了产品内部级连和焊点,提高了可靠性。
4 结 语
这里设计的厚膜H桥电机驱动电路经过实际应用表明:该电路不仅安全可靠地实现了电机的双向转动和调速,提高了驱动电路和系统的可靠性,而且产品体积小,导热性能好,效率高,能在恶劣的使用环境下安全工作,适合军、民两用。
参 考 文 献
[1]Intersil.Application Note AN9325.3.2003.
[2]Intersil.HIP4081 Data Sheet.1996.
[3]IR.IRFP250N Data Sheet.2004.
[4]谭建成.电机控制专用集成电路.北京:机械工业出版社,1997.
[5]谭建成.新编电机控制专用集成电路与应用.北京:机械工业出版社,2005.
[6]吴红星.电机驱动与控制专用集成电路及应用.北京:中国电力出版社,2006.
[7]张崇巍,李汉强.运动控制系统.武汉:武汉理工大学出版社,2002.
[8]刘宝延,程树康.步进电动机及其驱动控制系统.哈尔滨:哈尔滨工业大学出版社,1997.
[9]高钟毓.机电控制工程.2版.北京:清华大学出版社,2002.
[10]王成元.电机现代控制技术.北京:机械工业出版社,2006.
[11]谢少荣,蒋蓁,罗均,等.现代控制与驱动技术.北京:化学工业出版社,2005.
[12]冬雷.DSP原理及电机控制系统应用.北京:北京航空航天大学出版社,2007.
