
基于动态模糊人工势场法的移动机器人路径规划分析
2024-05-18 06:17孙琳琳
电脑知识与技术 2024年8期
孙琳琳
摘要:移动机器人的路径规划是机器人导航中的重要问题。本研究介绍了动态模糊人工势场法的原理和基本思想,并讨论了该方法在移动机器人路径规划中的应用。通过引入动态模糊人工势场法,有效避免了机器人陷入局部最小值,并能够快速、高效地找到最优路径。在实验中,使用了一台移动机器人进行了路径规划的仿真实验,并与其他常用的路径规划方法进行了比较。实验结果表明,基于动态模糊人工势场法的移动机器人路径规划具有良好效果,具有较好的性能和适用性,为移动机器人路径规划提供了新的思路,具有良好的应用前景。
关键词:移动机器人;路径规划;动态模糊人工势场法;仿真实验;效果评估
中图分类号:TP393 文献标识码:A
文章编号:1009-3044(2024)08-0032-03
开放科学(资源服务)标识码(OSID)
0 引言
移动机器人路径规划是指在给定环境中,通过算法使机器人能自主地决策如何从起点到达目标点的过程。在实际应用中,路径规划是移动机器人导航和行动的重要一环,直接影响着机器人的运动效率。基于动态模糊人工势场法的移动机器人路径规划是近年来研究的热点。传统人工势场法将机器人视为一个质点,在考虑静态环境和目标吸引力的基础上,通过计算环境障碍物的斥力和目标点的引力,从而生成虚拟的势场地图。机器人根据势场地图的信息来规划路径。然而,传统人工势场法存在局限性,如易陷入局部最小值、难以处理动态环境等问题。而动态模糊人工势场法是对传统方法的一种改进,引入模糊逻辑和动态调整的机制,通过模糊化处理来解决传统方法中的二值化问题,使得机器人能更好地适应复杂的环境。另外,动态模糊人工势场法能根据环境的变化实时调整势场参数,使得机器人能灵活应对动态环境。可见,基于动态模糊人工势场法的移动机器人路径规划是最先进的研究方向,能有效解决传统方法中存在的问题,并且能够适应复杂和不确定的环境。随着科学技术的不断发展和进步,相信该方法将在移动机器人领域发挥重要的作用,为机器人的自主导航提供可能性[1]。
1 传统人工势场法分析
传统人工势场法是一种常用的机器人路径规划方法,其以人工势场概念为基础,通过模拟物体之间的相互作用力,实现机器人的路径规划。该方法主要包括引力和斥力两个基本原理。首先是引力原理。在传统人工势场法中,机器人被视为一个质点,目标位置被视为一个吸引机器人的引力源,这个引力源会对机器人施加一个向目标位置的引力,使得机器人受到引力的作用朝目标位置移动。引力的大小和方向取决于机器人与目标位置之间的距离,距离越近,引力越大,反之引力越小,通过引力原理,机器人能被引导到目标位置附近;其次是斥力原理。在传统人工势场法中,避障障碍物被视为机器人周围的斥力源,这些斥力源会对机器人施加远离障碍物的斥力,使得机器人受到斥力的作用远离障碍物。斥力的大小和方向取决于机器人与障碍物之间的距离,距离越近,斥力越大,反之斥力越小。通过斥力原理,机器人能避开障碍物,安全地绕过它们。传统人工势场法通过引力和斥力相互作用来指导机器人的移动,机器人会在引力和斥力的共同作用下,选择最优的路径达到目标位置。为了确保机器人能在复杂环境中顺利移动,会设置各种其他因素,如边界限制、速度调整等。传统引力和斥力势场函数如下:
[Uatt=12ζρ2gq] (1)
[Urep=12η1ρq-1ρ02,ρqρ00,ρq≥ρ0] (2)
式中:[ξ]为引力增益系数;[η]为斥力增益系数;[ρ0]为障碍物影响距离;[ρgq]为机器人位置到目标点的欧式距离;[ρq]为障碍物影响区域到机器人位置的最小距离。
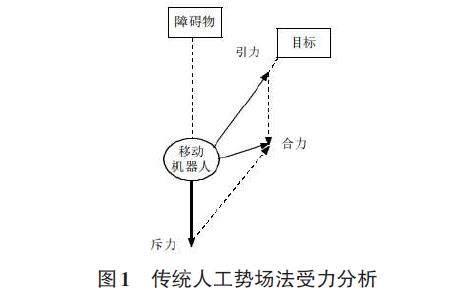
然而,传统人工势场法也存在一些问题。一方面,由于引力和斥力的设计需要提前知道目标位置和障碍物的信息,因此对于动态环境下的路径规划来说不太适用。另一方面,由于斥力是以距离为依据的,当机器人与障碍物非常接近时,斥力会变得非常大,可能导致机器人出现震荡或陷入局部最小值的情况(如图1所示)。尽管传统人工势场法存在一些问题,但其基本原理仍然被广泛应用于机器人路径规划领域。通过合理设计和改进,可以克服一些问题,并提高路径规划的效果。同时,也有更多的路径规划方法被提出,如A*算法、Dijkstra算法等,其能与传统人工势场法相结合,共同应用于机器人的路径规划中,以获得更好的效果[2]。
2 动态模糊人工势场法
2.1 基本原理
动态模糊人工势场法是一种基于人工势场原理的路径规划方法,通过模拟物体间的吸引和排斥力,实现对机器人的智能导航。DFAPF的基本原理是将移动对象视为一个质点,周围环境视为势场,其 由吸引力和排斥力两部分组成。吸引力使得移动对象被引向目标点,而排斥力则使其避开障碍物。在DFAPF中,吸引力和排斥力的大小由一系列模糊规则来决定,这些模糊规则基于环境中的信息,如目标点位置、障碍物位置、形状等。通过模糊逻辑推理,根据当前环境的状态为移动对象生成相应的吸引力和排斥力。吸引力是移动对象与目标点之间的引力,使得移动对象朝目标点移动,吸引力大小和移动对象、目标点之间的距离有关,距离越远,吸引力越大,反之亦然。吸引力的方向指向目标点,使得移动对象朝目标点前进;排斥力是移动对象和障碍物之间的斥力,使得移动对象避开障碍物。通过将吸引力和排斥力叠加,能得到移动对象在当前环境中的总勢能,移动对象会根据总势能变化,调整自身运动方向和速度。当移动对象靠近目标点时,吸引力逐渐增大,而排斥力逐渐减小,使得移动对象能顺利到达目标点[3]。
2.2 修改势场力函数
对于特殊位置所产生的问题,要优化目标点的相关距离,在斥力势场函数方面应用机器人[4]。而对于透过特殊运动状态所产生的问题,则需要将受速度影响的分量,应用到势场力函数上才能解决。(1)机器人根本达不到预期的目标,如果目标在障碍物的影响范围内,使用传统的势场功能,所以要在改进模型中增设调节因子[X-Xgn],[X-Xg]是机器人到目标点的距离,n是超过零的实数。在机器人移动到目标点的过程中,不仅会使重力势场下降,还会使斥力势场下降,并确保在机器人到达指定位置之前,重力势场和斥力势场都会下降到零之前,重力势场一直高于斥力势场。(2) 考虑到机器人和障碍物之间的高速相对运动,碰撞问题变得十分常见。当障碍物以较快的速度追逐目标时,机器人很难有效躲避,这给将障碍物送到指定目标带来巨大困难。为了解决这类问题,工作人员引入速度型矢量型技术。通过新的引力和斥力功能,希望能科学处理这种情况。
[Fatt=-ζρ2gq+Kvvg-v] (3)
[Frep=Freρ1+Freρ2+Kvv-v0, ρqρ0Kvv-v0,ρq≥ρ0] (4)
式中:V、V0、Vg分别代表机器人的速度、障碍物和目标点;[Kv]、[Kv]分别表示重力函数分量和受速度影响的斥力函数分量的增益系数。
3 仿真试验及结果
3.1 典型位置关系下机器人的路径规划
为了验证上述模糊人工位场法的应用效果,需要根据传统人工位场法在特殊情况下存在的问题,分别对优化后的效果进行详细观察。为此,将设计仿真实验,并在MATLAB条件下进行,使用平面直角坐标系,并假设各单位对应的实际物理距离为10厘米,机器人的起点位被设定为(0, 0),而目标点的起点位为(35, 36)。通过这些设定,可以对优化后的模糊人工位场法进行测试,并观察其效果,从而验证该方法在特殊情况下的应用效果是否得到改进[5]。
首先,合理规划机器人路径。当障碍物移动到(34,34) ,机器人从起始位置进行避障,并实施跟踪目标。根据试验结果发现,通过优化方法的应用,机器人能够成功地规避障碍物,并在特殊位置上持续追踪目标。除此之外,机器人还可以跨越多个狭窄通道上的障碍。现在,起跑位置有四个障碍分别是(14个、14.5个)、(16.5个、11.5个)、(19.5个、17个)、(13.5个、17个),形成了一个比较完整的狭窄的通道。机器人以起始地点为基准,通过这条狭窄的通道对目标进行躲避和跟踪。因此,根据测试结果显示,机器人能够有效地控制局部的极小值,精确调节势场力的大小,在障碍物形成狭窄通道的情况下,能成功避开障碍物[6]。
3.2 特殊运动状态下机器人的路径规划
目前有三个障碍物位置分别为(12,4),(16,35),(25,26),对应的速度分别为V0(1)=[0.1,0.5],V0(2)=[0.1,0.8],V0(3)=[0.2,0.3]。目标点的速度为VG=[0.2,0.3]。机器人通过速度V=[0.2,0.4]来躲避障碍物,并实时跟踪目标。根据实验结果,在第一阶段运动中,机器人从起始点(12,4)开始,遇到了一个阻碍物。机器人成功绕过这个阻碍物,避免了与它发生碰撞,并继续向前方移动。在第二阶段中,起始点(16,35)的障碍物移动到了一个机器人可以预先躲避的位置。机器人实时控制自己的移动方向,确保能够成功避开这个障碍物。在第三阶段操作中,位于(25,26)位置的障碍物正在追踪目标的运动方向,机器人没有躲避这个障碍物,而是合理调整了自己力的大小,以节省时间并快速到达目标。在第四阶段的运动中,机器人向着障碍物移动,因为机器人和障碍物之间存在相对运动关系。然而,在随后的运动过程中,机器人与障碍物之间的运动关系发生了变化。他们的运动方向变得平行,不会发生碰撞。机器人会沿着最优的直线距离,无视障碍物,并始终追踪目标[7]。
4 总结
综上所述,本研究通过使用基于动态模糊人工势场法的移动机器人路径规划方法,对移动机器人在不同环境中的路径规划进行了分析研究。通过对比实验和性能评估,得出以下结论:
1) 动态模糊人工势场法结合势场法和模糊逻辑,能根据环境的动态变化来调整机器人的路径,并且避免障碍物和优化路径的选择。
2) 在没有动态障碍物的情況下,该方法能够快速找到最优路径,并且能够避开静态障碍物。
3) 当环境中存在动态障碍物时,该方法能够及时调整机器人的路径以避免碰撞,并且能够根据障碍物的位置和速度进行动态规划。
4) 当环境中存在大量障碍物或者复杂的地形时,该方法可能会出现路径的选择不够灵活或者陷入局部最优解的情况。
参考文献:
[1] 陈艺文,江文松,杨力,等.基于运动约束的移动机器人路径规划[J].计算机集成制造系统,2023,29(4):1186-1193.
[2] 李永迪,李彩虹,张耀玉,等.基于改进SAC算法的移动机器人路径规划[J].计算机应用,2023,43(2):654-660.
[3] 刘超杰,刘洋,张文博,等.融合TEB与Stanley的移动机器人路径规划控制算法[J].制造业自动化,2023,45(4):180-186.
[4] 刘紫燕,张杰,袁浩,等.融合改进RRT和DWA算法的移动机器人路径规划[J].机械设计与制造,2023(11):224-229.
[5] 李逸飞,王书亭,熊体凡,等.兼顾启停特性和转角时耗的移动机器人路径规划[J].西安交通大学学报,2023,57(2):192-202.
[6] 刘冲,刘本学,吕桉,等.基于改进RRT算法的室内移动机器人路径规划[J].组合机床与自动化加工技术,2023(10):20-23,29.
[7] 郭志军,尹亚昆,李亦轩,等.融合改进A?和TEB算法的移动机器人路径规划[J].河南科技大学学报(自然科学版),2023,44(4):57-65.
【通联编辑:光文玲】
猜你喜欢
中国医药导报(2016年30期)2016-12-28
中国教育技术装备(2016年19期)2016-12-27
现代商贸工业(2016年22期)2016-12-27
电子技术与软件工程(2016年20期)2016-12-21
科技视界(2016年26期)2016-12-17
电脑知识与技术(2016年26期)2016-11-25
科技视界(2016年20期)2016-09-29
考试周刊(2016年64期)2016-09-22
科技视界(2016年14期)2016-06-08
科教导刊·电子版(2016年5期)2016-04-19
