
基于模糊控制的增程式电动汽车能量管理控制研究
2024-05-15 13:14钟勇,邱煌乐,李方舟,范周慧,易思敏
车用发动机 2024年2期
关键词:模糊控制
钟勇,邱煌乐,李方舟,范周慧,易思敏


摘要: 为了提升增程式电动汽车的燃油经济性并使其能够适应更加复杂的行驶工况,在保证汽车动力性的前提下,以控制电池SOC在工作范围内和等效百公里燃油消耗量较小为目标,以某增程式电动汽车为参考对象进行动力参数匹配,分别建立功率跟随控制策略模型、模糊功率跟随控制策略模型和加速度模糊功率跟随控制策略模型。在AVL_Cruise软件上完成整车模型的搭建并验证其动力性,运用Matlab/Simulink软件搭建控制策略模型,在WLTC和CLTC工况下进行联合仿真分析。试验表明:在满足动力性要求的基础上,功率跟随控制策略在WLTC和CLTC工况下的等效百公里燃油消耗量较其他两种控制策略较低,但是对CLTC较复杂的工况适应性差,具体表现在电池SOC的范围低于给定的电池工作范围,影响电池寿命;模糊功率跟随控制策略引入电池SOC状态,有效地改进了功率跟随对复杂工况适应性差的缺陷,但存在等效百公里燃油消耗量较大问题,且自身对复杂工况的适应性依旧存在缺陷;加速度模糊功率跟随控制策略综合考虑前二者控制策略的优劣性,引入加速度这一影响因素,解决了前二者对复杂工况适应性差的缺陷,与模糊功率跟随控制策略相比燃油经济性得到了提升。
关键词: 增程式电动汽车;燃油经济性;能量管理;模糊控制
DOI: 10.3969/j.issn.1001-2222.2024.02.010
中图分类号:U469.72文献标志码: B文章编号: 1001-2222(2024)02-0068-07
在绿色能源发展理念指导下,中国经济和社会面临着向低碳能源转型的重要问题,在碳中和背景下,新能源汽车得到快速发展[1]。近年来,电动汽车作为一种环境友好型交通工具得到了广泛的关注和研究。然而,电动汽车的续航里程和充电时间仍然是限制其普及和用户接受度的主要因素之一。为了解决这一问题,增程式电动汽车作为一种技术方案被提出,并得到了广泛的研究和探索。在增程式电动汽车中,能量管理控制策略起着至关重要的作用,它可以有效调度电池和增程装置之间的能量流动,从而实现最佳的续航里程和性能。在过去的几年中,研究人员广泛关注了不同的能量管理控制策略,旨在提高增程式电动汽车的能效和性能。
功率跟随控制也是增程式电动汽车能量管理中的一个重要研究方向。功率跟随控制的目标是根据驾驶需求和路况变化,实时调整增程装置的功率输出,以保证车辆动力性能和能效之间的最佳平衡。近年来,研究者们对功率跟随控制进行了广泛研究,并提出了一系列的控制策略和算法,以优化增程式电动汽车的能量管理性能。冯仁华等[2]对功率跟随策略充电功率系数进行优化;陈维荣等[3]提出一种根据SOC動态调节功率跟随系数的能量管理方法;王鲁闽等[4]提出了一种基于最优曲线的功率跟随控制策略。这些研究都对功率跟随控制中某些参数进行优化,但是由于功率跟随本身的局限性,即增程器中发动机的工作点会随着整车需求功率的变化而出现频繁变化,使得整车燃油经济性出现大幅度下降。
此外,模糊控制作为一种强大的控制方法,已被成功地应用于能量管理控制策略中。模糊控制的优势在于它能够处理模糊和不确定的输入信息,并生成相应的控制动作。在增程式电动汽车领域,模糊控制被广泛应用于能量管理系统的优化和调节中,以实现更好的能效和驾驶性能。都雪静等[5]基于模糊逻辑算法对三工作点控制策略进行了优化并联合仿真;牛礼民等[6]针对传统模糊控制中规则库制定单一、动力系统与控制策略参数协调性不高等问题,提出一种基于全局优化算法的增程式电动汽车模糊控制策略;王勇等[7]对模糊控制以及智能算法进行了研究,设计了双模糊控制策略和PSO优化后的双模糊控制策略;Tao Jilinis等[8]、Feng Na等[9]结合算法提出了智能模糊控制策略。以上学者对于模糊控制中的模糊规则库进行了优化研究,但车辆行驶过程是一个复杂的过程,不仅需要对规则库进行优化,还需要对模糊参数进行研究。
本研究基于增程式电动汽车,将模糊控制与功率跟随策略相结合,既避免了由于功率跟随策略导致的发动机工作点频繁切换,也降低了模糊控制对工程经验的过度依赖。在此基础上,加入加速度影响因素,使得该控制策略能够适应更加复杂的行驶工况。
1动力参数匹配及整车建模
增程式电动汽车与纯电动汽车不同的地方在于多了一个动力来源,其动力由增程器和动力电池提供。与混合动力汽车不同的是,增程式电动汽车的增程器不直接参与车辆行驶驱动,整车的动力由驱动电机提供,增程器只作为额外的能量来源。本研究的增程式汽车结构和能量流向见图1,所研究的增程式电动汽车主要由驱动电机、动力电池、发动机、发电机组成,其中发动机和发电机组成增程器。
1.1动力参数匹配
参数设计是研究控制策略的重要前提。合理的设计能够大大减少整车研发的复杂程度,为后面的策略仿真奠定一定的基础[10]。本课题研究的能量管理控制策略是以能达到动力性指标为前提,达到较好的经济性为目标。以国内某款增程式电动汽车为参考对象,结合其提供的试验数据进行动力参数匹配。整车参数如表1所示,动力性指标如表2所示。
由于整车的动力由驱动电机、增程器、动力电池提供,因此只需对以上三个部分进行动力参数匹配。
1.1.1驱动电机参数匹配
根据最高车速大于140 km/h的动力性要求 ,对驱动电机的最高转速进行匹配。驱动电机的最高转速要满足式(1)。
nmax=vmax×i0.377×r。(1)
式中:nmax为驱动电机最高转速;vmax为动力性指标的最高车速;i为主减速器传动比;r为车轮滚动半径。根据式(1)得到的驱动电机最高转速可用来确定驱动电机的额定转速:
ne=nmaxβ。(2)
式中:ne为驱动电机额定转速;β为扩大恒功率区系数。
驱动电机作为增程式电动汽车唯一的直接驱动动力部件,需要克服整车行驶过程中产生的行驶阻力。车辆在行驶过程中的行驶阻力如式(3)所示:
Ft=Gfcosα+CDA21.15ua2+Gsinα+δmdudt。(3)
式中:Gfcosα为滚动阻力;CDA21.15ua2为空气阻力;Gsinα为坡度阻力;δmdudt为加速阻力。根据式(3)可得到驱动电机各个工况下的需求功率,驱动电机的峰值功率应该满足各个工况下的需求功率,如式(4)所示。
Pmax≥max(Pmax1,Pmax2,Pmax3)。(4)
式中:Pmax为驱动电机峰值功率;Pmax1为最高车速确定的功率;Pmax2为最大爬坡度确定的功率;Pmax3为最大加速度确定的功率。由式(4)计算出驱动电机的峰值功率后,额定功率应满足式(5)。
Pe=Pmaxγ。(5)
式中:Pe为驱动电机额定功率;γ为驱动电机过载系数。驱动电机的基本参数如表3所示。
1.1.2增程器参数匹配
增程器由动力源和发电机组成,常用发动机和发电机的组合模式[11]。在进行发动机动力参数匹配时,参考轻型轿车燃油经济性计算法则,用整车90 km/h的巡航速度来匹配发动机功率。发动机的需求功率可由式(6)得到。
Peng=Preqηgηeηdischηchar。(6)
式中:Preq为整车需求功率;ηg为发电机的平均效率;ηe为驱动电机的平均效率;ηdisch为动力电池放电效率;ηchar为动力电池充电效率。
增程器中的发电机与发动机同轴机械连接,属于刚性连接,在进行发电机动力参数匹配时需要遵循下列原则:
1) 发电机与发动机的额定功率相差不大;
2) 发电机与发动机的转速相差不大;
3) 发电机与发动机的工作高效率区在相同区域。
经过动力参数匹配的增程器基本参数见表4。
1.1.3动力电池参数匹配
动力电池作为增程式电动汽车纯电动模式唯一能量源,其选型和参数直接影响到整车动力性及纯电续驶里程,因此对于动力电池进行合理的选型和参数设计尤为重要[12]。增程式电动汽车的电池容量以车速60 km/h均匀行驶来确定[13]。动力电池的总容量由式(7)、式(8)计算得出。
Cbat≥Mgf+CDAv221.153.6×DηtηmηbatUbat×Sev,(7)
Wbat=CbatUbat1 000×3.6。(8)
式中:Cbat为满足续航里程的容量;Sev为纯电模式下行驶目标里程;D为电池的放电深度;ηt为机械系统总效率;ηm为驱动电机平均效率;ηbat为电池平均放电效率;Ubat为电池额定电压;Wbat为根据电池容量计算的电池总能量。为满足基本的动力性指标,要求动力电池的最大放电功率满足驱动电机峰值功率,即需满足式(9)。
Pbat=Pmax_edriveηm+ΔP。(9)
式中:Pbat为动力电池最大放电功率;Pmax_edrive为驱动电机峰值功率;ΔP为其他电气附件功率。计算得到的动力电池基本参数如表5所示。
1.2整车建模
本研究中整车模型采用AVL_Cruise进行搭建。整车模型由车身模块、车轮模块、驱动电机模块、发电机模块、发动机模块、主减速器模块、动力电池模块、联合仿真模块等组成(见图2)。
搭建发动机模型,其万有特性见图3。搭建驱动电机模型,其MAP图如图4所示。搭建动力电池模型,根据厂家提供的试验数据,其SOC与电压的关系如图5所示。
2能量管理控制策略
2.1功率跟随控制策略
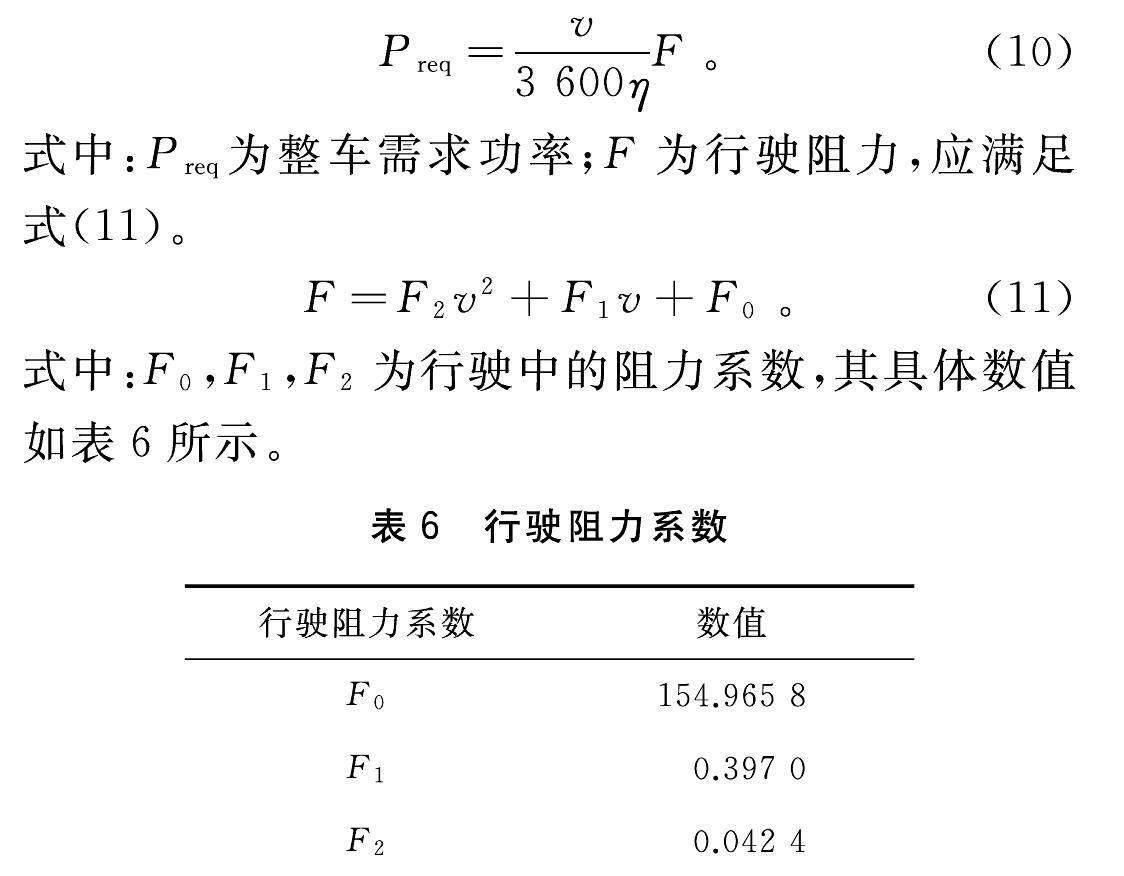
功率跟随控制策略是除了恒温器控制[14]外最常用的控制策略,其基本规则是以动力电池的SOC 值作为增程器的开启条件,增程器开启后发动机能够对整车行驶中的需求功率进行跟随。为了简化计算且使仿真更加符合实际车辆行驶工况,行驶阻力采用通过行驶阻力系数的计算形式获得。其中行驶阻力系数为试验数据。将式(3)变形可知,整车需求功率应满足式(10)。
Preq=v3 600ηF。(10)
式中:Preq为整车需求功率;F为行驶阻力,应满足式(11)。
F=F2v2+F1v+F0。(11)
式中:F0,F1,F2为行驶中的阻力系数,其具体数值如表6所示。
本研究制定的功率跟随策略使发动机在对整车需求功率进行跟随的同时,能够工作在最佳工作曲线上。发动机的最佳工作曲线如图6所示。
在Matlab/Simulink中搭建控制策略模型,分為增程器控制模块和驱动电机控制模块。
2.2模糊功率跟随控制策略
相较于功率跟随控制策略,采用模糊控制来对增程器进行控制,基本规则由原本的增程器开启后对整车需求功率进行跟随,改进为增程器开启后考虑整车需求功率和当前时刻下动力电池SOC值来对增程器的输出功率进行控制。对原功率跟随控制模型进行修改,加入模糊控制器。
动力电池SOC的基本论域在[0,100%]之间,根据厂家提供的电池包数据,其工作范围为20%~80%,因此调整为[20%,80%]。划分为5个模糊子集:很低(VL)、低(L)、中(M)、高(H)、很高(VH)。
据工况的最高车速,计算整车最大需求功率。整车需求功率VRP论域为[0,23],划分为5个模糊子集:很小(VS)、小(S)、中(M)、大(B)、很大(VB)。根据发动机最佳工作点,将增程器的需求功率ERP论域设置为[0,40],并划分为5个模糊子集:很小(VS)、小(S)、中(M)、大(B),很大(VB)。模糊规则见表7。
2.3加速度模糊功率跟随控制策略
与模糊功率跟随控制策略不同的是,加速度模糊功率跟随策略考虑了加速度这一因素。增程器的输出功率由整车需求功率、动力电池SOC和加速度共同决定。加速度的论域由两个行驶工况确认。其中, WLTC中最高加速度为6.3 m/s2,CLTC中最高加速度为6.9 m/s2。由于制动能量回收的电能少于本研究车型的动力电池总能量,减加速度对电池的SOC影响较小,故忽略不计,将加速度的论域确定为[0,6.9]。划分为3个模糊子集:缓慢加速(SA,0-2)、中等加速(MA,2-4)、快速加速(FA,4-6.9)。其模糊规则如表8所示。
3仿真结果分析
对动力参数匹配结果进行动力性仿真,分别建立百公里加速仿真任务、最高车速仿真任务以及最大爬坡度仿真任务。通过AVL_Cruis的results.log可查阅到结果(如表9所示),可知符合动力性指标,验证了参数匹配的准确性,并为经济性仿真提供前提。
通过采用AVL_Cruise和Matlab/Simulink联合仿真的方式对三种控制策略的经济性进行仿真并对结果进行分析。仿真根据《中国汽车行驶工况第1部分:轻型汽车》[15]在WLTC工况和CLTC工况下进行。
等效燃油消耗量计算参考胡后永[16]对并联混合动力汽车的换算方式,即
A=B+xC。(12)
式中:A为等效百公里燃油消耗量;B为百公里燃油消耗量;C为百公里耗电量;x为动力电池放电转换系数,取值0.33。
3.1功率跟随策略仿真
如图7所示,增程式汽车在功率跟随控制策略下,实际车速都满足WLTC和CLTC工况,进一步验证了动力参数匹配的准确性。功率跟随控制策略下两种工况的动力电池SOC变化曲线如图8所示。WLTC工况下,动力电池SOC处在电池安全工作范围内。CLTC工况下,动力电池SOC在1 500 s之后掉落到20%之下,不在电池安全工作范围内,影响动力电池使用寿命。出现这种状况的原因是,功率跟随策略并未考虑当前时刻动力电池SOC的大小,SOC掉到20%之下的这一时间段,整车需求功率正处于比较小的状态,此时增程器的输出功率跟随着整车需求功率也较小,车辆的耗电量大于增程器提供的电能,动力电池SOC掉落到工作范围外。功率跟随策略的燃油经济性如表10所示。
3.2模糊功率跟随策略仿真
如图9所示,增程式汽车在模糊功率跟随控制策略下,实际车速都满足WLTC和CLTC工况,进一步验证了动力参数匹配的准确性。模糊功率跟随控制策略下两种工况的动力电池SOC变化曲线如图10所示。WLTC工况下,动力电池SOC处在电池安全工作范围内。CLTC工况下,动力电池SOC在859 s左右掉落到20%之下,不在电池安全工作范围内,影响动力电池使用寿命。模糊功率跟随策略相较于功率跟随策略,引入了动力电池SOC这一变量,并考虑整车需求功率,有效解决了功率跟随策略的缺陷。但在859 s左右时增程器正处于刚启动阶段,此刻的整车加速度呈现一个从0激增的状态,导致动力电池的SOC急速下降,掉落至安全工作范围外。模糊控制虽然解决了功率跟随的缺陷,但出现了新的问题。模糊功率跟随策略的燃油经济性如表11所示。
3.3加速度模糊功率跟随策略仿真
如图11所示,增程式汽车在加速度模糊功率跟随控制策略下,实际车速都满足WLTC和CLTC工况,进一步验证了动力参数匹配的准确性。加速度模糊功率跟随控制策略下两种工况的动力电池SOC变化曲线如图12所示,两种工况下,动力电池SOC都处在电池安全工作范围内。与模糊功率跟随控制策略不同的是,加速度模糊功率跟随策略综合考虑加速度、当前时刻动力电池SOC和整车功率,有效地解决了模糊功率跟随策略因为急加速出现的动力电池SOC在工作范围外的缺陷。加速度模糊功率跟随策略的燃油经济性如表12所示。
4结论
a) 比较3种控制策略的百公里等效燃油消耗量,功率跟随策略的等效燃油消耗量在3种策略中最低;
b) 加速度模糊功率跟随策略综合考虑加速度、SOC和整车需求功率,解决了其他两种策略对工况适应性差的问题,百公里等效燃油消耗量相较于模糊功率跟随策略,WLTC工况优化了9%,CLTC工况优化了12.5%;
c) 加速度模糊功率跟随策略考虑的因素全面,因此控制效果好,但是提高了模糊规则库制定的难度。
参考文献:
[1]魏文强.碳中和背景下新能源汽车产业发展研究[J].时代汽车,2023,402(6):87-89.
[2]冯仁华,孙旺兵,赵智超,等.增程式混合动力汽车能量管理策略设计与优化研究[J].重庆理工大学学报(自然科学版),2022,36(8):11-20.
[3]陈维荣,李锦程,李奇.燃料电池小型车SOC动态调节的功率跟随控制策略[J].西南交通大学学报,2021,56(1):197-205.
[4]王鲁闽,武濤,缪雪龙.串联式混合动力搅拌车控制策略仿真研究[J].农业装备与车辆工程,2023,61(2):132-136.
[5]都雪静,王宁,崔淑华.基于模糊逻辑算法的增程式电动汽车控制策略研究[J].公路交通科技,2022,39(12):213-223.
[6]牛礼民,张泉泉,朱奋田,等.基于全局优化算法的增程式电动汽车模糊控制策略[J].重庆交通大学学报(自然科学版),2022,41(2):137-145.
[7]王勇,汤赐,肖宁,等.基于优化的增程式电动汽车能量管理策略[J].电力学报,2022,37(2):109-117.
[8]Tao Jili,Zhang R,Qiao Z,et al.Q-Learning-based fuzzy energy management for fuel cell/supercapacitor HEV[J].Transactions of the Institute of Measurement and Control,2022,44(10):1939-1949.
[9]Feng Na,Ma Tiehua,Chen Changxin.Fuzzy energy management strategy for hybrid electric vehicles on battery state-of-charge estimation by particle filter[J].SN Applied Sciences,2022,4(10):05131-05139.
[10]石磊.增程式电动汽车动力系统参数匹配和整车控制策略研究[D].秦皇岛:燕山大学,2022.
[11]王耀南,孟步敏,申永鹏,等.燃油增程式电动汽车动力系统关键技术综述[J].中国电机工程学报,2014,34(27):4629-4639.
[12]罗祥.增程式电动汽车控制策略设计与优化算法研究[D].长春:吉林大学,2022.
[13]电动汽车动力性能试验方法:GB/T18385—2005[S].
[14]段俊法,张宇.增程式电动汽车研究[J].河南科技,2018(25):108-109.
[15]李朝阳,李永光,周猛.基于中国工况的轻型汽车油耗特性研究[J].小型内燃机与车辆技术,2023,52(1):57-61.
[16]胡后永.基于模糊控制的并联混合动力汽车控制策略研究[D].长春:吉林大学,2023.
Energy Management Control of Range-Extended Electric Vehicle Based on Fuzzy Control
ZHONG Yong,QIU Huangle,LI Fangzhou,FAN Zhouhui,YI Simin
(Fujian Key Laboratory of Automotive Electronics and Electric Drive(Fujian University of Technology),Fuzhou350118,China)
Abstract: In order to improve the fuel economy and adapt to more complex driving conditions of range-extended electric vehicles(EVs), a conventional power following control strategy model, a fuzzy power following control strategy model and an acceleration fuzzy control power following control model were developed to control the battery SOC within the operating range and acquire the appropriate equivalent 100 km fuel consumption with the premise of ensuring the dynamics of the EVs. The vehicle model was built and its dynamics was verified with AVL_Cruise software, and the control strategy model was simulated and analyzed under WLTC and CLTC conditions using Matlab/Simulink software. The experiments show that the equivalent 100 km fuel consumption of traditional power following control strategy is lower than the other two control strategies under WLTC and CLTC conditions with the premise of meeting the dynamics requirements, but it is poorly adapted to the more complex conditions of CLTC, incorporating that the range of battery SOC is lower than the manufacturer-given range so as to affect the life of battery. The fuzzy power following control strategy introduces the battery SOC state to effectively improve the defects of poor adaptability to complex working conditions from the traditional power following, but there is a high equivalent 100 km fuel consumption and its own adaptability to complex working conditions still has defects. Considering the advantages and disadvantages of the first two control strategies, the factor of acceleration is introduced and the acceleration fuzzy control power following strategy is put forward, which solves the defects of the first two poor adaptability to complex working conditions and improves the fuel economy compared with the fuzzy power following control strategy.
Key words: range-extended electric vehicle;fuel economy;energy management;fuzzy control
[編辑: 袁晓燕]
猜你喜欢
成都信息工程大学学报(2021年6期)2021-02-12
电子制作(2019年16期)2019-09-27
电源技术(2017年1期)2017-03-20
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
电子制作(2016年21期)2016-05-17
通信电源技术(2016年5期)2016-03-22
西北工业大学学报(2015年1期)2016-01-19
池州学院学报(2015年3期)2016-01-05
电源技术(2015年11期)2015-08-22
