
基于图形的可视化指挥救援系统研究
2024-05-07 02:48张建军
中国新技术新产品 2024年6期
张建军
(山东青岛消防救援支队,山东 青岛 266000)
各种灾害的发生都需要通过及时救援才能将生命和财产损失降至最低。以火灾救援为例,我国每年都有消防官兵在救援过程中受伤,甚至付出生命的代价[1]。因为灾害现场形式复杂、危险源众多且部分危险因素未知,现场救援人员和指挥系统经常处于分离状态。由于救援指挥中心与灾害现场距离较远,因此无法对灾情进行准确把控[2]。在这种情况下,指挥系统建设必须要解决的问题是救援指挥及救援现场的协调性问题。随着BIM技术和GIS技术的出现,大型的楼宇厂房都有可视化的3D仿真效果,灾害现场也可以随时调度准确的电子地图[3]。如果充分采用这2种技术构建可视化的救援指挥系统,就可以对救援现场进行掌控,并可以实现远程指挥调度,保证救援现场一致性和协调性。基于此,本文以图形理论为基础构建可视化的救援指挥系统,并通过试验测试其性能。
1 可视化指挥救援系统的模块设计
本文的核心研究目标就是构建可视化的救援指挥系统。在这个系统中,应该充分考虑灾情、救援设备和救援人员的情况,并分别将其进行模块化处理,形成灾情可视化模块、设备可视化模块、人员可视化模块,整个救援指挥系统的可视化设计框图如图1所示。
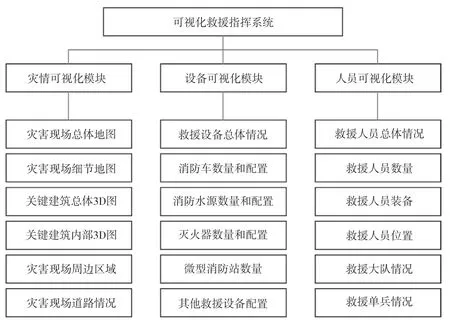
图1 救援指挥可视化系统的设计框图
从图1可以看出,针对灾害救援的可视化指挥系统,对整个系统进行模块化处理是将复杂任务简单化、深度任务扁平化、耦合技术松散拆解的关键。
经过模块化处理后,现场灾情可以实现可视化,包括现场总体地图、现场细节地图、关键建筑总体、关键建筑内部、现场周边以及现场道路等方面的可视化展示,这便于指挥调度有一个直观的对象和场景。设备可视化可以使指挥人员掌控救援所需的各种设备、物资,尤其是这些设备的配置、所处的位置,也是决定指挥决策的重要依据。人员可视化决定了救援工作的执行力。对人员队伍构成、所在位置、设备配置的可视化,也便于指挥系统对整个救援工作进行整体把控。
2 可视化指挥救援系统的功能设计
对于被救援现场的可视化是救援指挥系统可视化设计的最重要功能,也是后续其他可视化设计的基础。首先,采用BIM技术引入关键建筑物的信息化数据,从而实现关键建筑的整体可视化和内部结构可视化。一个具体的BIM建筑模型导入的案例如图2所示。这是一个3层的建筑,采用可视化的BIM模型可以清晰地了解其整体高度、外观布局、窗体楼门所在的位置和楼顶区域。如果这栋建筑内发生险情,就可以进一步细化其内部的楼层或房间,更细致地进行可视化展示。在这种全信息化的展示下,楼层内每个房间的情况都可以清晰地展示出来。如果再配备摄像机监控网络,就可以对房间内部360°可视化,也可以立即发现房间内的火情。
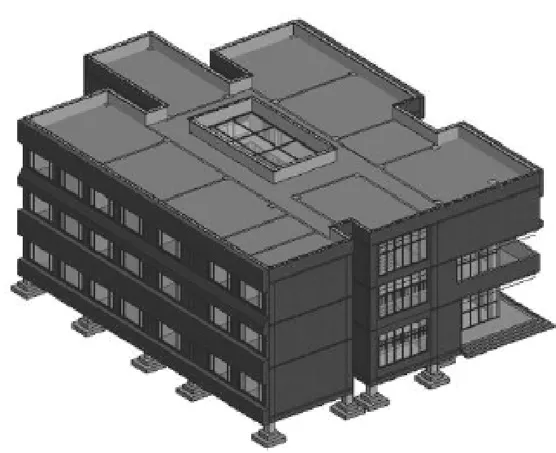
图2 引入可视化指挥系统中对关键建筑的BIM模型
3 可视化指挥救援系统的性能测试
通过构建基于图形的可视化救援指挥系统就可以构建险情发生区域的全局地图,进而实现最有效的救援路径配置,并指挥救援车辆、救援人员、救援物资到达目的地。在全局地图信息可视化的前提下,采用基于蚁群算法的救援路径搜索。
在险情救援路径规划问题的研究过程中,首先,选择一个合理有效的状态空间描述方法,从而建立一个准确、可靠、易于编码和更新的环境地图。常用的方法有栅格法、几何法和拓扑图法。本文采用简单、可靠、描述性、强的栅格法进行环境建模。在n×n的栅格环境中,栅格序号与坐标的关系如公式(1)所示。
式中:x、y为救援车辆的当前坐标;W为栅格的总宽度;mod()为取模运算。
蚁群算法是一种仿生学启发式算法。在自然环境中,蚂蚁们可以本能地找到从一定位置到食物来源地的最优或者次优路径。由此,学者们提出蚁群算法,并广泛地应用于各种各样的寻优问题中。
蚁群算法的主要步骤如下:在t时刻,第k只蚂蚁从i节点到j节点的概率转移过程如公式(2)所示。
式中:(t)为移动机器人从i点移动到j点的信息素浓度;(t)为移动机器人从i点移动到j点的启发系数。
蚂蚁在完成一次循环后会在所经过的路径上留下信息素,而路径原有的信息素又会不断降低,其更新过程如公式(3)~公式(5)所示。
式中:Q为信息素强度;Lk为蚂蚁k次循环路径长度。
传统蚁群算法具有容易陷入局部最优的缺点。为了解决该问题,首先,引入信息素额外增加机制。每只蚂蚁经过一次循环后,利用传统蚁群算法即可找出最优解。对其信息素给予额外补偿,蚂蚁之间通过信息素传递信息,找出的最优解对应的信息素增强,使本次循环中找到的最优解在蚂蚁的下次循环中对后面经过的蚂蚁的影响更大,解决了蚁群算法在迭代过程中容易陷入局部最优,从而使路径中出现不必要尖峰的问题。信息素额外增加公式如公式(6)~公式(7)所示。
式中:Δρ′ij为蚂蚁在路径上的信息素增加;L'为本次循环结束后所找出的最优解对应的路经长度;solutionobt为最优解的集合。
为了验证本文所提出的改进蚁群算法对于救援车辆在可视化全局地图路径规划中的有效性,接下来进行试验。在试验中设定可视化指挥系统可以观测的地图为16×16个栅格的大小,每个栅格的实际边长为1m。本次试验中,移动机器人的起始点在坐标为(1,16)的栅格处,终点在坐标为(14,1)的栅格处。
在试验中,蚁群算法的配置如下:蚂蚁总数量为30个,最大迭代次数设定为300次,启发因子α=1.0,启发因子β=5.0,蒸发系数λ=0.5,信息素因子Q=100,惩罚系数κ=0.3。按照传统蚁群算法,险情救援车辆在可视化的全局地图中规划的路径如图3所示。
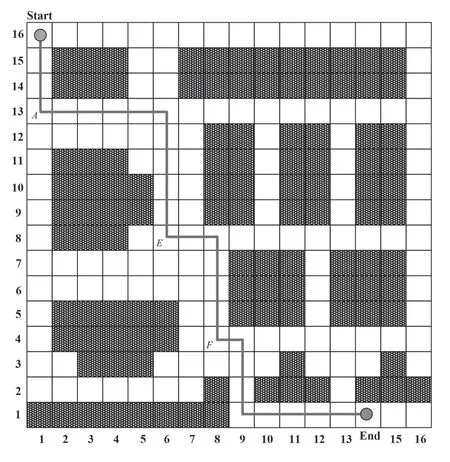
图3 传统蚁群算法的规划路径
图3中,标记为Start的圆点代表险情救援车辆的起始位置,标记为End的圆点代表险情救援车辆的终点位置,粗实线代表传统蚁群算法规划出的路径。白色网格代表险情救援车辆可以行走的区域,黑砂网格代表在其他建筑等障碍区域,险情救援车辆不可以行驶。从图3可以看出,受到一步视野的影响,险情救援车辆都是拐直角弯,从而形成1条多段折线组合的路径。这样的路径不仅绝对距离长,对于险情救援车辆转向、轮胎的磨损也比较大。
采用本文改进的蚁群算法,为险情救援车辆在可视化全局地图中进行路径规划,结果如图4所示。

图4 本文改进蚁群算法的规划路径
图4中,粗实线是改进蚁群算法为险情救援车辆规划出的路径。这条路径中含有A、B、C、D、E、F、G7个关键点。从图3中传统蚁群算法规划的路径可以看出,在这条路径中,险情救援车辆在A点开始走2个栅格的对角线,到达B点。从C点~D点的这一段也是走2个栅格的对角线。从E点到F点,走了15个栅格的对角线。从F点到G点,走了2个栅格的对角线。这样的走法,大大减少了行动路径。同时,险情救援车辆在拐点转弯角度变小,减少了险情救援车辆轮胎等部件的机械磨损。因为在本文改进蚁群算法中,对于视野的扩大、信息素更新策略的改进等措施起到了作用,所以能形成这种效果。进一步比较本文改进蚁群算法和传统蚁群算法的一些结果,见表1。

表1 2种方法对比
从表1的数据可以看出,本文改进蚁群算法给险情救援车辆规划的平均路径和最优路径都大大降低。而算法迭代次数增加和消耗时间增加并不明显,这也再次证明了本文改进蚁群算法的优势。上述试验表明,当救援可视化指挥与智能算法结合在一起时,可以更高效地完成救援调度工作。
4 结论
随着城市建筑的稠密度不断加大,出现以火灾等为代表的灾情后,救援工作将变得非常困难。尤其是在指挥系统对灾害现场、救援人员、救援装备以及救援物资都无法准确了解的情况下,救援工作将难以开展,救援效率将大幅度降低。基于这种情况,利用信息化技术,构建可视化的救援指挥系统,对于降低救援难度、提升救援效率具有重要意义。在本文的研究工作中,首先,对救援指挥系统的模块进行划分,并形成了3个可视化模块,其下又进行进一步细分。其次,通过引入关键建筑BIM信息模型,可以实现对灾害现场的整体可视化展示和内部细节可视化展示。当复杂区域的遇到险情时,为了救援,在可视化指挥系统构建全局地图的基础上对蚁群算法进行改进,给救援车辆进行高效的路径规划和引导,性能测试试验证实了路径规划和可视化指挥后的有益效果,提升了险情救援的可靠性。
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
机械工业标准化与质量(2022年8期)2022-10-09
散文诗世界(2021年11期)2021-11-30
加油站服务指南(2021年8期)2021-11-04
舰船科学技术(2021年12期)2021-03-29
中国安全生产(2018年12期)2018-07-24
凿岩机械气动工具(2017年1期)2017-05-17
当代化工研究(2016年6期)2016-03-20
水利规划与设计(2016年7期)2016-02-28
