无人自行车平衡控制的研究综述
2024-04-22 09:53王淇任林昶涛肖腾飞
时代汽车 2024年4期
王淇任 林昶涛 肖腾飞


摘 要:调查了对无人自行车平衡控制的发展史,了解并总结了近年来学者们在研究的过程中在结构以及控制上的优化和解决的一些技术问题,最后对无人自行车的未来发展进行展望并总结内容。文章作为综述性论文主要针对无人自行车平衡控制的结构优化和控制优化两个方面进行了讨论,结合了从自平衡稳定概念诞生以来至今的一些文献,对其平衡系统的发展进行了总结概括,并对无人自行车的投入使用寄予期望。
关键词:无人自行车 平衡控制
1 引言
由于轻量级、简单的设计和易于操纵的特点,自行车深受人们所喜爱,世界上第一辆自行车是德国巴登男爵卡尔·冯·德莱斯于1817年研制出来的一种木轮车,它有车把可以控制方向,这辆木质自行车对人类有着重大贡献,为日后自行车的更迭换代打下了基础,它的诞生距今已有上百年时间。
随着社会科技与经济实力的不断发展,人们的生活也变得越发富足了起来,人们对生活的追求已经从仅仅解决个人的温饱问题逐渐转变为更加舒适、健康的生活,因此,人们越来越追求精致的智能生活,智能手环,智能家居,智能汽车等产品的相继出现,进一步推动了“互联网+”的热潮,智能化生活已成为时代之大势所趋,在今天,自行车也因为本身使用率极高,而突然立于这一课题的风口浪尖,传统自行车正面临着科技智能化的挑战[1]。
众所周知,自行车的平衡性与其行进速度的快慢息息相关,行驶速度越快,自行车的平衡性也就越稳定,骑行者能够通过左右摆动车把轻松控制自行车的行进方向,而当自行车处于低速或者完全静止,或受到外力影响的情况下,骑行者无法通过控制车把而使自行车长时间保持平衡,所以,若要使自行车实现智能化,其需要解决的最根本的问题便是车体的平稳性。
以下论文将对近年来无人自行车平衡系统的发展史进行概述,总结在研究中所出现的优缺点,并对无人自行车的发展前景寄予期望。
2 结构优化
2.1 车身结构
一辆普通的自行车的基础结构主要包括:导向、制动以及驱动系统。早在19世纪whpple等人就在对自行车动力学的研究中提及了关于自行车自平衡的机械问题[2],但受限于技术上的困难,并没有对此做出过于深入的研究。长久以来,研究人员们为了保障自行车在无人操控的情况下也能够保持平衡状态行进,在自行车的结构方面不断的进行优化,并使用了许多方法进行论证和试验。
针对无人自行车进行结构上优化这一难题,我国首次对此进行研究是由学者刘延柱在1990年所发布的对人车系统稳定性的探讨中指出的此前国外学者将骑行者与车身视为一体以此进行分析的不合理结论,并凭借大量数据进行对比分析纠正了此类错误[3]。
此后,国防科技大学的王路斌在对无人自行车的建模与控制的讨论中,通过多次设计无人自行车的系统和机构,并在用MATLAB进行了仿真分析后,发现了在选取系统主体时采用质量和尺寸较小,重心低的自行车会更好,在控制平衡时,只需要很小的力就能使系统保持平衡状态[4]。于2020年,重庆大学的曾静在研究无人自平衡自行车系统时,也遵循了这个原则,选取了童车作为试验对象,不仅能够大大的降低研究时的成本开销,同时也减小了电机所需产生的力矩要求,避免了许多硬件上会遇到的问题[5]。
就在今年2月份,北京信息科技大学自动化学院的刘佩佩等人又对自行车结构进行了新的优化[6],他们设计了一种曲柄滑块机构并采用滑膜控制器来控制自行车的转向,通过延长力臂,使转向电机在以同样功率输出力矩时,产生更大的力矩,借此降低了控制平衡的难度。
2.2 辅助平衡装置
在选取自行车车身的同时,还要考虑控制车体平衡,车身是否要安装辅助平衡装置。如今对无人自行车进行控制的研究方法主要被分为有无辅助平衡装置,辅助平衡装置包括了动量轮,驱动动量轮的直流电机,以及陀螺仪与加速度计等传感器。
在不使用辅助平衡装置的自平衡自行车研究中,研究人员们一般会对车把的转向进行控制,驱动车把在自行车倾斜时进行摆动,借此使前轮带动车身保持平衡,早在1970年,David E. H. Jones在研究自行车的稳定问题时[7],便采用了这种方法,他所设计的自行车Unridable Bicycle MK1在前轮的基础上添加了一个辅助轮,增大了前轮对地的接触面积,同时使前轮更加的稳定,在骑行时不需要控制车把转向就能很好的保持平衡。
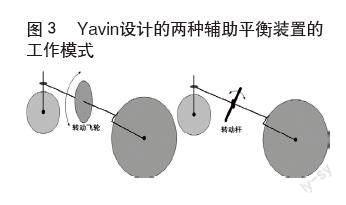
自行车的辅助平衡装置也被称为飞轮系统,当自行车系统不平衡时,为阻止系统的倾倒,与飞轮相连的直流电机会为飞轮提供其所需的力矩来驱动飞轮加速运动,使飞轮与自行车倾倒方向同向转动产生一个与系统倾倒时相反的力矩,使其相互抵消以保持自行车系统的平衡。通过安装这个装置,自行车的平衡能够更简单的控制,在结构的分析上不会过于繁琐,也因此近代以来越来越多学者在研究时更愿意辅以飞轮系统进行控制。2006年,南非的学者Yavin在进行对自行车机器人的平衡控制的研究时便使用了飞轮系统,他将飞轮安置于底座上,即靠近自行车重心处,使自行车即使是在低速行驶下也能保持平衡[8],此外,他还提出了使用转动杆平衡器来保持自行车的平衡,对这两种平衡装置都进行了分析,并通过拉格朗日方程分别建立了这两种平衡器工作时的模型。[9]
3 控制优化
飞轮系统与无人自行车控制的结合首次受到全世界人们的广泛关注是在2008年在日本千叶市的幕张展览馆中所出现的作为村田制造所的企业形象代理人之一的“村田顽童”,这是一个能够骑自行车的机器人,其始终保持平衡的能力正是通过该机器人胸口处的飞轮系统所保障的,这次的亮相使大部分人第一次对无人自行车的研究有了认识[10]。
在飞轮系统这一辅助平衡装置出现后,无人自行車的平衡控制问题得到了很好的解决,越来越多的学者也开始加入到了对无人自行车的研究中来,而对自行车平衡进行控制的技术也逐渐被重视了起来,研究人员们对此进行了许多研究。
2015年,河南工程学院的陈素霞等人基于陀螺仪对无人自行车的控制技术进行了分析,通过对平衡系统的建模分析,将系统运动进行了线性化处理,有效的将自行车与陀螺仪的倾角稳定在了一个微小的范围内,为无人自行车平衡系统的研究提供了重要的参数依据[11]。
同年,桂林电子科技大学的李勇等人在对两轮自平衡机器人的研制中,以单飞轮自平衡实验为基础,以STM32单片机为系统主控制器,设计出了具有双飞轮的自平衡机器人,该研究将两个飞轮组件分别置于机器人的前后端进行独立控制,两个飞轮绕各自偏转轴进行转动,通过偏转电机控制使其不断的修正力矩,实验结果证明了其在受到外力影响下仍能够很好的平衡能力,以及比单飞轮更能够抵抗外部强烈冲击的特点[12],验证了双飞轮控制平衡的可行性。
广东工业大学的熊超伟等人在2018年对自平衡小车的自平衡系統的PID控制算法进行了研究,该控制算法基于STM32微处理器对直立PID控制器进行了闭环控制,通过姿态传感器不断向主控制器反馈小车当前状态量并调整电机转速与角度,实现了单轨车辆的自平衡控制[13]。
于2022年,大连理工大学的许自鹏在研究无人自行车控制的过程中采用了变论域模糊滑模的控制方法,在自行车行驶的过程中通过状态观测器观察平衡出现的数据误差,再由滑模控制器与模糊控制器实时对平衡控制调节参数,通过该方法能够大大提高自行车在平衡过程中的抗干扰能力[14]。
此外,在对角动量轮的控制上,东北林业大学的学者孟剑新等人提出了新的技术创新,在使用了加速度计和陀螺仪的基础上使用了一款微控制器集成的CH100姿态传感器获取自行车姿态信息,并且加入了一阶低通滤波减少电机抖动对该姿态传感器的所测得数值的影响,另外,孟剑新等人还引入了二阶巴特沃斯滤波和卡尔曼滤波进行融合,再次对一阶滤波处理出来的值进行消抖,大大提高了传感器所采集到的当前状态值的稳定性,在进行对舵机控制的PID的调参上也能够使最终输出值保持在一个稳定的状态[15](表1)。
4 未来展望
如今,人们在骑行自行车的过程中仍存在着较大的隐患性,道路使用者、
载具特性、基础设施、环境和暴露性是其最主要的危险来源[16]。而无人自行车的发展将会大大提高其安全性,通过其传感器能够自动控制自行车的速度、方向以及转弯等动作,实现人车之间的智能互动,减少人们在骑行自行车时出现的危险性。
无人自行车的研究将是未来智能交通不可缺少的一个重要发展方向。在未来,若将其投入到人们的日常出行中,还能够通过智能控制极大的减少道路的交通拥堵并避免一些因人为因素所导致的交通事故。
随着我国绿色出行政策的推出,为响应国家号召,自行车必将成为人们不可或缺的代步工具,此外,无人驾驶自行车或许还能够解决物流行业在近距离运送轻量级货物时的成本问题,并大大提高运输效率。经过历代学者对自行车平衡系统研究的不断优化和改善,无人自行车会在智能化的道路上不断进步,并终将进入到人们的生活中来,为人们带来便利。
5 总结
本次研究我们查询了大量的文献,总结了自行车在自平衡系统上的优化,分别对其结构和控制上的优化进行了研究,研究了无人自行车的平衡系统发展史,总结并对比了学者们在研究过程中所解决的问题,对于未来无人自行车的发展,期望其能够在不远的未来投入到人们的日常生活当中,解决人们现今在骑行自行车时所产生的一些安全问题。
参考文献:
[1]周路菡.传统自行车产业升级转型[J].新经济导刊,2015(12):73-76.
[2]Whipple F J W.The stability of the motion of a bicycle [J].Quar-terly Journal of Pure and Applied Mathematics,1899,30 (120):312-348.
[3]刘延柱.人车系统的稳定性问题[J].上海力学,1990(02):77-79.
[4]王路斌. 无人自行车建模与控制[D].长沙:国防科学技术大学,2007.
[5]曾静. 无人自平衡自行车系统的设计[D].重庆:重庆大学,2020.
[6]刘佩佩,周亚丽,张奇志.基于滑模控制的无人驾驶自行车设计与仿真[J].计算机仿真,2023,40(02):449-453+465.
[7]David E. H. Jones. The stability of the bicycle[J]. Physics Today,1970,23(4):34-40.
[8]Yavin Y. The derivation of a kinematic model from the dynamic model of the motion of a riderless bicycle[J]. Computers & Mathematics with Applications. 2006. 51(6). 865-878.
[9]Yavin Y. Stabilization and control of the motion of an autonomous bicycle by using a rotor for the tilting moment[J]. Computer Methods in Applied Mechanics & Engineering, 1999,178(3-4):233-243.
[10]丛秋波.村田制造所:“村田顽童”携手“村田婉童”展示高新技术[J].电子设计技术,2008(12):124-125.
[11]吕宽州,陈素霞,黄全振.基于陀螺仪的无人自行车平衡控制方法[J].计算机测量与控制,2015,23(07):2344-2346.
[12]李勇,耿建平,林群煦,张弓,王卫军.基于双飞轮陀螺效应的两轮自平衡机器人的研制[J].机电产品开发与创新,2015,28(06):14-16+28.
[13]熊超伟,王峰,揭云飞,智凯旋,李学易.基于PID控制的机器人自行车自平衡系统研究[J].电脑知识与技术,2018,14(19):274-275.
[14]许自鹏. 基于变论域模糊滑模的无人自行车控制[D].大连:大连理工大学,2022.
[15]孟剑新,张海若,栗昊,李丹丹.基于角动量轮控制的无人驾驶自行车的实现[J].科技创新与生产力,2023(02):100-104.
[16]叶陈凝.自行车使用者关于危险骑行行为的影响因素综述[J].中国高新科技,2021(16):157-158.
猜你喜欢
模具制造(2019年7期)2019-09-25
小哥白尼(军事科学)(2019年2期)2019-04-17
小哥白尼·趣味科学画报(2019年12期)2019-02-28
世界有色金属(2018年13期)2018-09-12
中国资源综合利用(2018年6期)2018-08-02
制造技术与机床(2017年11期)2017-12-18
岷峨诗稿(2017年4期)2017-04-20
中国自行车(2017年11期)2017-04-04
新高考(英语进阶)(2017年12期)2017-02-26
校园英语·中旬(2015年7期)2015-08-10