某型舰载机目标的ISAR 成像算法研究
2024-04-02 03:42彭关弘烨任新成王玉清杨鹏举
现代电子技术 2024年7期
彭关弘烨,任新成,王玉清,赵 晔,杨鹏举
(延安大学物理与电子信息学院,陕西延安 716000)
0 引 言
逆合成孔径雷达(ISAR)是一种利用目标的微动或雷达本身的运动,以实现目标的高分辨率成像的雷达。其通过反向地模拟合成孔径雷达的运动,利用目标本身的旋转或平动产生的多普勒频率差,从而获取目标的二维图像。相较于传统雷达技术,ISAR 提供的是动态、实时、具有较高分辨率的目标图像,而非单一的点目标信息。ISAR 的优势在于,它可以在很远的距离上对目标进行高分辨率成像,这使得ISAR 成为军事侦察、地球观测和灾害监测等领域的重要工具[1-5]。在军事侦察领域,ISAR 可以被用来识别和分类飞行中的目标[6],例如飞机和导弹,由于ISAR 可以提供关于目标的详细图像[7-9],因此可以更准确地识别目标类型,甚至可以识别出目标具体的型号。在地球观测领域,ISAR 可以被用于地形和环境监测,例如,可以使用ISAR 来探测和监测地球表面的变化,包括地震后的地形变化、洪水过后的水位变化等。此外,ISAR 也可以用于监测海洋表面的情况,如海洋浪涌、海冰变化等[10]。
尽管ISAR 在上述各个领域发挥着重要的作用,但ISAR 技术的研究和发展仍然面临一些挑战,例如如何提高图像的质量和分辨率,如何处理复杂背景下的目标识别等问题,其中成像方法是ISAR 技术面临的挑战之一。
传统的ISAR 成像方法在处理目标的复杂运动时[11],常常会导致图像模糊和失真,这一问题在实际应用中严重限制了其性能。为了克服这些挑战,研究者们开始探索新的成像方法。特别是,基于距离多普勒(RD)算法的ISAR 成像方法,因其简单且有效,引起了广泛的研究兴趣。RD 算法通过对雷达回波数据进行二维傅里叶变换,能有效抑制目标复杂运动对ISAR 图像的影响,从而获得更清晰、更精确的图像。
文献[12]提出一种基于稳相谱二维原理的改进双基地距离-多普勒算法,文献[13]提出一种新的运动补偿(MoCo)算法来提高机载SAR MoCo 的效率和鲁棒性,文献[14]提出的局部线性RD(L-RD)模型建立了局部高程的线性约束,迭代算法收敛速度较快。文献[15]利用RD成像的步骤构建了基于深度展开网络的RD 学习成像网络结构,将回波数据作为网络输入来学习回波数据到大斜视SAR 图像的成像过程。文献[16]构建距离向FrFT 域成像算法(RFrFT-RD),最后利用星载SAR 实测数据进行地物目标成像。文献[17]提出了一种新的基于相邻包络差序列NS 的包络对齐准则。
尽管RD 算法在ISAR 成像中的应用取得了一定的成功,但仍然存在一些问题和挑战。例如,由于RD 算法假设目标的运动是均匀的,因此,当目标的运动存在加速度时,RD 算法的成像效果会大大降低,这会导致ISAR 图像模糊和失真。
本文首先说明了ISAR 的成像原理,介绍了运动补偿中的包络对齐方法,在此基础上,提出了一种改进的包络对齐方法,通过某卫星成像对该方法进行验证,证明了该算法的适用性和灵活性,运用改进的包络对齐方法对某型舰载机进行成像,发现该方法可以有效地提高ISAR 图像的质量和分辨率。
1 ISAR 成像基本原理
1.1 几何模型
在逆合成孔径雷达成像中,雷达静止而目标匀速运动,如图1 所示,其运动包括从位置1 到位置3 的平动、位置3 的转动,以及位置3 到位置2 的圆周运动,而圆周运动在成像中无作用,可忽略。

图1 ISAR 成像中的平动与转动
目标和雷达的相对运动可视为目标的自转和其对雷达的平动。从位置1 到位置3 的平动中,各散射点产生的多普勒频率相同,对成像无效,需补偿。只有在位置2 的旋转运动才导致不同多普勒频率,有利于成像。平动补偿后即可视为雷达对转台目标的成像。
1.2 转台成像原理
ISAR 成像所必需的是目标绕其上的某一个参考点在一段时间内有一个旋转角,以此来获得高的横向分辨率。
如图2 所示,雷达不动,假定目标放置在一个旋转的平台上,以目标上的某个参考点为中心转动。若转台作逆时针方向旋转,那么位于转轴上的散射点子回波的多普勒频率为零,左侧为正,右侧为负,并且散射点偏离中心轴的距离越远,多普勒频率值就越大。图2 中所示的是将空间目标向二维平面xOy上进行的投影,转台模型就是目标绕z轴以均匀的角速度ω作旋转运动。

图2 ISAR 转台成像模型
假定雷达到目标旋转轴的距离为ra,雷达信号的波长为λ,那么在t= 0 时刻,目标上的某个散射点(r0,θ0,z0)到雷达的距离可以表示为:
如果目标旋转轴到雷达的距离ra远远大于目标的尺寸r0,则可以将式(1)近似表达为:
其中:
由此可以计算得到回波的多普勒频率为:
式中:x0和y0是目标的初始位置;ω是目标的角速度;t是时间;cosωt和sinωt是目标在时间t的位置。
取t=0 时刻周围极短的时间来处理接收信号,可以得到:
因此,由回波信号的距离延时及多普勒频率可以求出该散射点的位置(xa,ya)。距离向分辨率取决于脉冲信号的带宽,与脉冲信号的带宽B成反比,即:
由式(7)可知,目标的方位向分辨率取决于多普勒分辨率,对于所需的方位向分辨率ρa= Δx,则多普勒分辨率必须为Δfd= 2ω λΔx。实际上多普勒分辨率取决于相干积累时间T,即fd= 1T,换句话说,方位分辨率由下列公式得到:
通过以上分析可知,雷达发射信号的带宽越大,则距离向分辨率越高;雷达发射信号的波长越短,目标在成像积累时间内转过的总转角越大,则雷达在方位向上对目标的分类识别能力越强,分辨率越高。
1.3 距离-多普勒成像算法

图3 ISAR 成像原理图
用向量r→1与向量r→之和的绝对值来表示经过运动后雷达与目标上的任一散射点p之间的距离,其中向量r→1表示雷达到目标参考点的位置向量,向量表示目标参考点到目标上点p的位置向量。
雷达与目标上的任一散射点p之间的距离可以表示为:
式中:r、r1分别表示的模;定义向量的单位向量为=,由于r≪r1,那么式(9)可以简化为:
式中“·”表示向量点乘。
设雷达发射的信号为线性调频信号,表达式为:
式中:T为脉冲重复周期;f0表示信号的中心频率;τ表示脉冲宽度;γ=B τ表示信号的调频频率,B表示信号带宽;n代表发射的是第n个脉冲;a(t)表示信号的幅值,表示为:
值得一提的是,名物化的最终形式是名词,认知语言学的范畴原型和突显理论对名词这个语法范畴的研究有助于对名物化的理解。比如,Mihatsch(2009)结合Langacker对名词的概念基础的探讨,即通过隐喻的方式从物品(PHYSICAL OBJECT)的概念得到事物(THING)的图式,说明经过名物化过程后,从其他词类变形而来的名词可以获得名词的词汇语法和概念特征。
ISAR 的回波信号可以表示为:
式中:t′=t-表示目标的散射强度;V表示目标占据的空间容量;c 表示光速。
点O处的目标回波表达式为:
运动补偿在ISAR 成像中是关键,主要涉及包络对齐和相位补偿。包络对齐调整雷达回波信号的幅度,消除目标相对运动的影响,需要估算目标的距离和速度;相位补偿抵消回波信号的相位偏移,估计目标的旋转并调整雷达相位。这两步可以减少图像模糊,实现高清ISAR 成像,是雷达技术的核心挑战,也增强了目标观察的准确性。
2 包络对齐方法
包络对齐在ISAR 成像中起到了关键作用,同时为后续的相位补偿奠定了坚实的基础。C.C.Chen 在1980 年首次提出了传统的包络对齐方法,即所谓的相关法,这一方法充分利用了雷达发射信号脉冲重复频率的高速性质。具体而言,在两个相邻脉冲的时间间隔内,目标的运动幅度较小,角度变化量通常不会超过0.01°。因此,两次回波信号的包络之间呈现出强烈的相关性。相关法利用这一特性,采用了直接且高效的快速傅里叶变换进行包络对齐,从而使得其实现相当便捷,运行效率也颇高。但是该方法依然存在误差,即使处理每次回波信号产生的误差很小,但是在进行ISAR成像处理时,通常会处理几百乃至上千个回波信号,因累积而形成的大误差不容小觑。
包络对齐也被称为粗补偿,是对回波信号进行平移,将各次信号平移到一个距离单元内,包络对齐前后如图4 所示。分布在不同距离单元的回波信号经过包络对齐之后,实现了在距离方向上的对齐。

图4 包络对齐
3 改进的包络对齐方法及仿真验证
3.1 改进的包络对齐方法
在图像、信号处理领域,数据复杂性常用熵H来量化,定义为:
式中:R代表一个局部区域;ri是区域R中的像素或数据点值;p(ri)是ri在R中的概率。
本文提出的改进包络对齐方法主要关注每个像素位置x及其相邻像素构成的局部区域R(x),核心目标是通过适当的算法调整R(x)中的数据值,从而最小化该区域的熵,即
本文进一步采用梯度下降等优化算法,通过调整数据的属性(例如像素的强度、颜色或位置),以最小化每个局部区域的熵。值得注意的是,该方法不仅关注单个局部区域的优化,还综合考虑了图像或信号的全局特性,确保整体数据质量的提升。这种局部与全局的综合考虑使得该方法在应用于雷达图像处理时,能够有效地调整像素值,从而提高图像的整体质量。
图5 展示了算法流程图。首先在浅色框中获取原始图像或信号数据。接着,在网格框中计算每个像素的熵值,这在椭圆框中用于衡量数据复杂性。根据熵值与预设标准的对比,决定继续调整像素值(左侧竖框)还是使用如梯度下降的优化算法(左侧横框)。最后,深色框输出优化后的图像或信号数据,质量相比原始数据有所提高。

图5 算法流程图
3.2 仿真验证
图6 是使用Matlab 创建的某卫星散点图,这幅图像显示了卫星在空间中的位置即姿态。
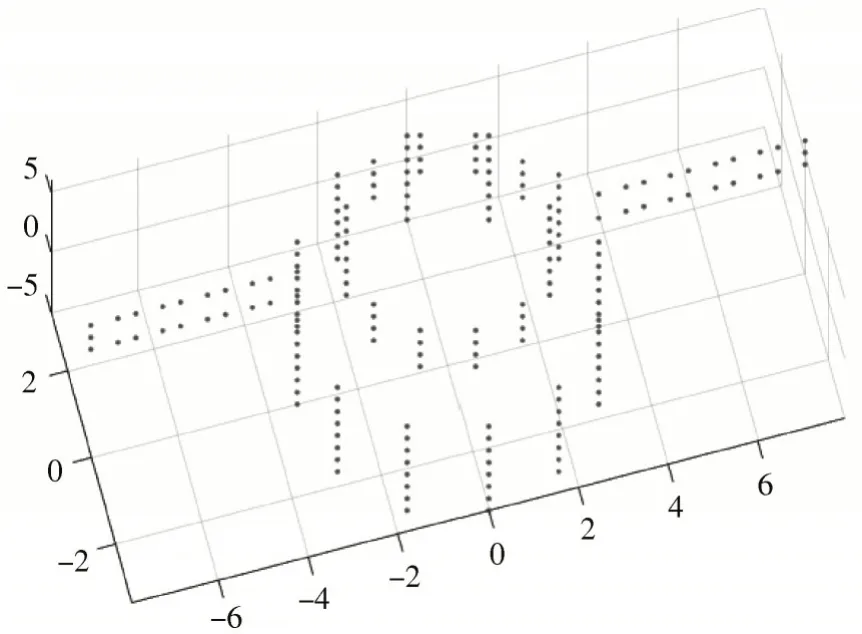
图6 某卫星散点图
图7a)为采用传统的包络对齐方法所成的像。该图像中,目标的平均反射强度为-10 dB,而背景噪声的平均强度仍为-25 dB,得到的信噪比约为15 dB。图7b)为采用改进的包络对齐方法所成的像。经过优化处理,目标的平均反射强度提高到了-8 dB,背景噪声得到了进一步的抑制,降低到了-28 dB,从而信噪比提高到了20 dB。不难看出,这种改进的方法使得图像的对比度和清晰度有了显著的提高,能够看到卫星的更多细节,包括其表面的纹理和结构。
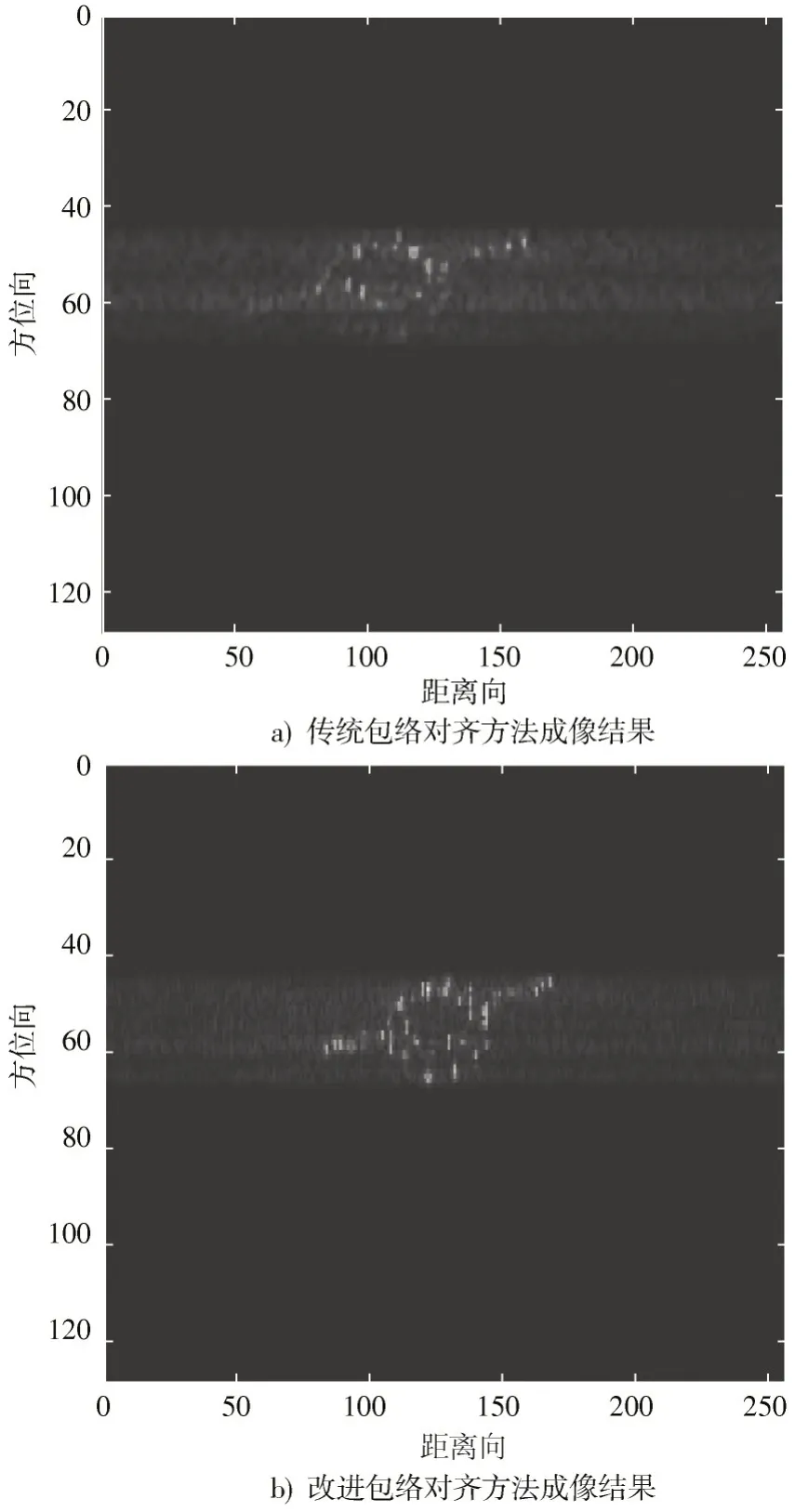
图7 ISAR 成像
这就验证了本文提出的改进成像算法的有效性、可行性。
4 实验仿真
以下仿真过程中,雷达带宽为400 MHz,载频为9.0 GHz,目标运动速度为100 m/s,x、y、z三个方向的加速度均为0.05 m/s2,仿真参数如表1 所示。

表1 仿真参数
如图8 所示为某型舰载机的实物图及其RCS 散点图,散点图上的反射点数量达到了5 000 个,平均散射点间距为0.2 m。与常规的三维模型不同,这个散点模型提供了一种独特的视角,能够从各个方向观察飞行目标,经过详细的数据分析,发现目标的平均反射强度为-10 dB,而背景噪声的平均强度约为-25 dB。
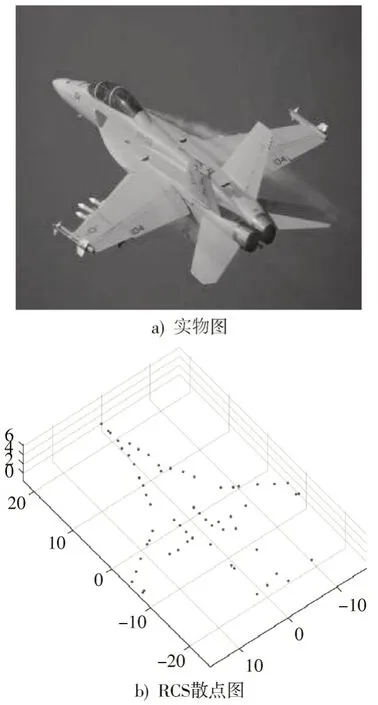
图8 某型舰载机的实物图及其RCS 散点图
以下将仿真验证中所述方法应用到更复杂的某型舰载机进行实验仿真,分辨率设置为0.1 m,对应于实际距离的1 10。通过调整距离向和方位向的分辨率,获得舰载机的ISAR 仿真成像。
本文对同一型号的舰载机从不同的方位角(125°、175°、225°、275°)进行了雷达成像,雷达的照射功率为2 kW,脉冲重复频率为1 kHz。如图9 所示,从图中可以看出,随着观察方位角的改变,飞机在雷达成像中的表现也发生了显著的变化,特别是飞机机身的位置和形状,这些变化实际上反映了飞机飞行姿态的变化,提供了理解和分析飞机飞行状态的重要信息。
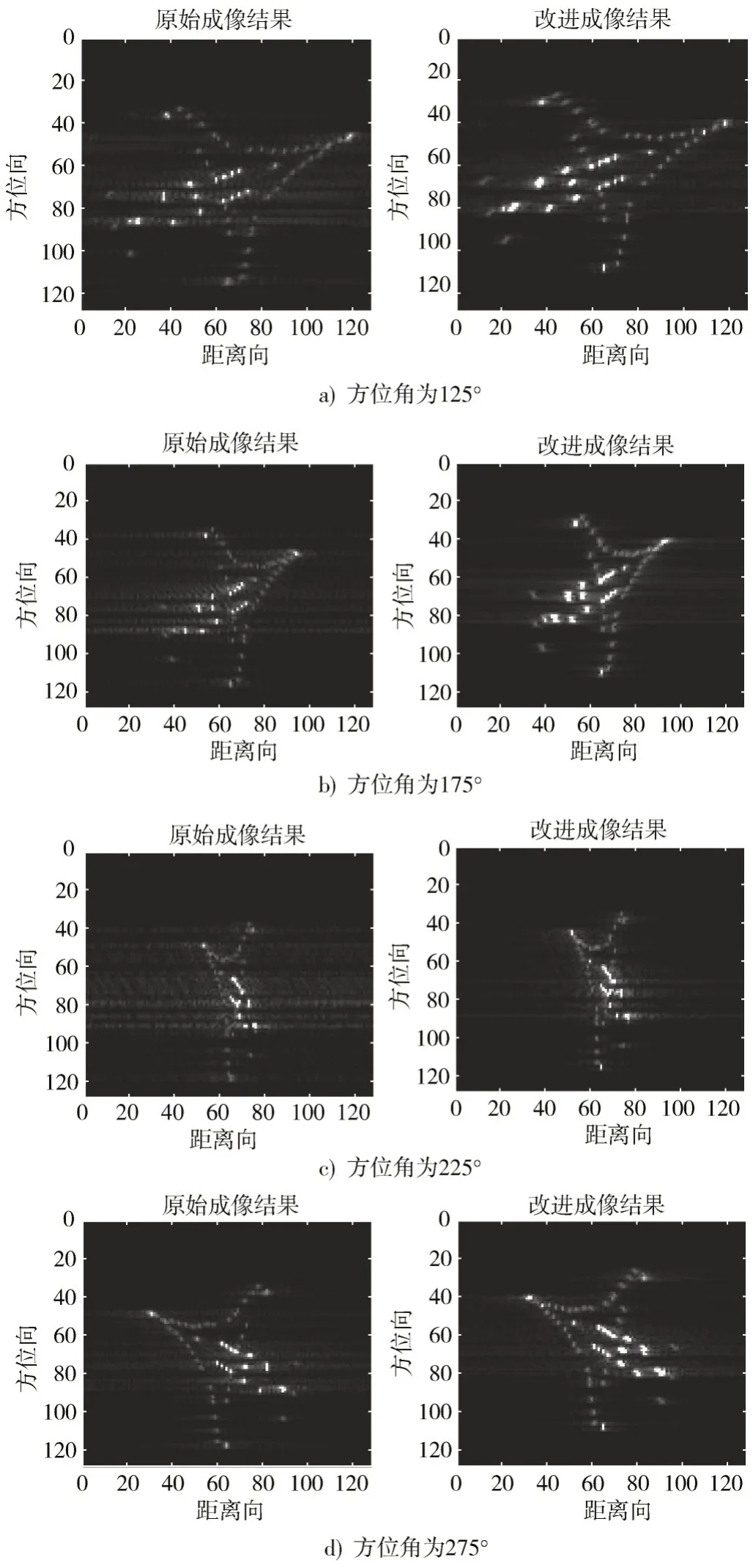
图9 四种情况成像结果对比图
飞行姿态通常由三个角度来描述:俯仰角(pitch)、滚转角(roll)和偏航角(yaw),在仿真中模拟了目标的旋转,这会影响到散射点的位置,从而影响到雷达成像的结果。
当观察方位角从125°改变到175°时,注意到飞机在雷达成像中的机身位置和形状发生了明显的变化,这是由于飞机从一种飞行姿态转向到另一种飞行姿态,这种转向在雷达成像中表现为飞机机身的位置和形状的变化。
当观察方位角从225°改变到275°时,可以观察到除了散射点有些许变化外,飞机机身有很大程度的翻转,这是因为飞机进行了一个较大角度的转向或翻滚,这在雷达成像中表现为飞机机身的显著变化。为了提高雷达成像的质量,采用改进的包络对齐可以有效地提高雷达成像的清晰度和准确性,以便能够更准确地观察和理解飞机的飞行姿态变化。
总之,仿真实验表明,通过对比不同方位角下的雷达成像结果,可以观察到飞机机身的变化,这对于理解飞机的飞行状态和行为非常有帮助。
5 结 论
本文研究了改进的包络对齐方法在逆合成孔径雷达(ISAR)图像处理中的应用。研究证明,这种改进的方法不仅显著提升了图像质量,同时也增强了从各个方向获取图像的能力。本文研究成果不仅在军事领域有应用价值,同时也具备潜在的民用价值。当然,本文只是就改进包络对齐方法提升图像质量进行了研究,更多的提升图像质量的算法还有待于今后进一步研究。
注:本文通讯作者为任新成。
猜你喜欢
大自然探索(2023年7期)2023-08-15
数学物理学报(2019年3期)2019-07-23
小学生学习指导(低年级)(2018年12期)2018-12-29
家庭影院技术(2018年9期)2018-11-02
自动化学报(2017年5期)2017-05-14
成都信息工程大学学报(2017年6期)2017-03-16
火控雷达技术(2016年3期)2016-02-06
电子器件(2015年5期)2015-12-29
百科探秘·航空航天(2015年4期)2015-11-07
机械与电子(2014年2期)2014-02-28