老年人对自动驾驶汽车接受度影响因素分析
2023-04-21 12:12周水水宋正沄杨柳
时代汽车 2023年8期
周水水 宋正沄 杨柳




摘 要:为了改善老年人出行,针对中国老年人出行机动性差和可达性低的问题,提出用自动驾驶汽车技术解决,研究了老年人群体对自动驾驶汽车接受度的潜变量因素。采用结构方程模型,对全国的734份有效问卷调查样本分析,构建了三个模型进行了分析和对比。本文揭示了构建的模型的优劣,并分析了影响老年人对自动驾驶汽车接受度的心理潜变量因素,找出了其中的关键影响因素,为自动驾驶汽车在老年人中的普及提供了建议。
关键词:交通工程 接受度 影响因素 结构方程模型 老年人 自动驾驶汽车
Analysis of factors influenced the elderly to acceptance autonomous vehicles
Zhou Shuishui Song Zhengyun Yang Liu
Abstract:In order to improve the mobility of the elderly, aiming at the poor mobility and low accessibility of the elderly in China, autonomous vehicle technology is proposed to solve the problem, and the latent variable factors of the elderly's acceptance of autonomous vehicles are studied. Using structural equation model, 734 valid questionnaires in China were analyzed, and three models were constructed for analysis and comparison. This paper reveals the advantages and disadvantages of the constructed model, analyzes the psychological latent variable factors that affect the elderly's acceptance of self-driving cars. The key influencing factors are finds out, according to which suggestions for the popularity of self-driving cars among the elderly are put forward.
Key words:traffic engineering; acceptance; influencing factor; SEM; elderly; autonomous vehicles
1 引言
人口老龄化给交通出行带来了巨大挑战。老年人日常活动的出行行为,包括休闲、购物、去医院和接送小孩上學[1]。在交通方式选择上,主要包括步行、公共交通、自行车和小汽车。由于公共汽车服务水平较低、秩序混乱、适老化改造程度不足以及不能及时提供出行信息等问题,不利于老年人的日常出行活动。而且由于身体机能逐渐下降,反应逐渐迟钝、导致他们不能有效利用私家车。可见,老年人的出行需求和出行障碍的矛盾,影响了老年人的出行需求和出行方式选择。自动驾驶汽车(autonomous vehicles,AV)具有效率高、机动性强、经济环保、安全性高、可缓解交通拥堵等优点,可以很好的解决老年人在出行中遇到的困难。但由于自动驾驶汽车并未普及,老年人对自动驾驶汽车的态度未可知。因此,本文考虑模型的潜变量因素,建立三个结构模型,以路径系数和解释行为方差为标准,对比各个模型的解释力的优劣,分析影响老年人对自动驾驶汽车接受度的因素。
2 理论基础及模型建立
2.1 结构方程模型
SEM是一种多元数据统计方法,将两个或多个模型联合起来,以变量的协方差矩阵为基础,实现对变量之间关系的分析,包括因果关系、区别直接和间接作用。它一般用3个基本的方程式如下:
式中:η为内生潜变量;ξ为外生潜变量;Λx表示X与ξ之间的关系,是外生观测变量在外生潜变量上的因子载荷矩阵;Λy表示Y与η之间的关系,是内生观测变量在内生潜变量上的因子载荷矩阵;X、Y为测量变量;ε为Y的测量误差;δ为X的测量误差;Γ和β均为路径系数,分别表示外生潜变量对内生潜变量的影响和内生潜变量之间的关系;ζ为残差项,反馈方程中没有解释的部分。其中,第1个方程是结构模型的表达式,第2,3个方程是测量模型的表达式。在结构方程模型中,比较有代表性的是TAM和TPB模型。
2.2 建立模型
本研究通过考虑了TPB和TAM提出了一个综合模型(模型1),并进一步探讨这两组变量与老年人对自动驾驶汽车接受度之间的关系。其概念如图1。
因此,除了包括考虑感知易用性和感知有用性两个因子,从交通技术采用的角度探讨老年人对自动驾驶汽车接受意愿外,还考虑了主观规范、 态度和 感知行为控制三个因子,从理性决策方面来分析他们对自动驾驶汽车的接受行为意向。为了验证建立的联合模型的解释力,本研究将它与TPB(模型2)和TAM(模型3)两个模型对比分析。
3 问卷设计与数据调查
3.1 问卷设计与数据统计
本文中用于评估TAM和TPB中的观测变量来自之前的研究。根据对文献的回顾,并结合老年人情况,设计了包含所有正在调查的测量变量的问卷并通过预测试修正,测量问题来自之前的研究,例如表1是其中一个2个潜变量的观测变量,并使用5点李克特量表进行评估。
该调查收到有效问卷734份,其中年龄60-65岁占比46.3%,66~70岁占比31.5%,71~75岁占比16.3%,76岁以上占比5.9%。受访者55.9%为女性。65.8%受访者至少具有初中文化程度。11%的受访者具有相对较高的年收入。65.4%的人具有老年人免费公交卡。家庭有小汽车的占比69.3%。44.6%的老年人具有驾照。有智能手机的占比78.2%。仍然有全职工作的人占比13.2%。由此可见,调查对象中,近80%老年群体年龄在60~70岁之间,大部分收入中等偏下,超过一半的人具有免费公交卡和家庭有小汽车。
4 结果分析与讨论
4.1 信效度检验
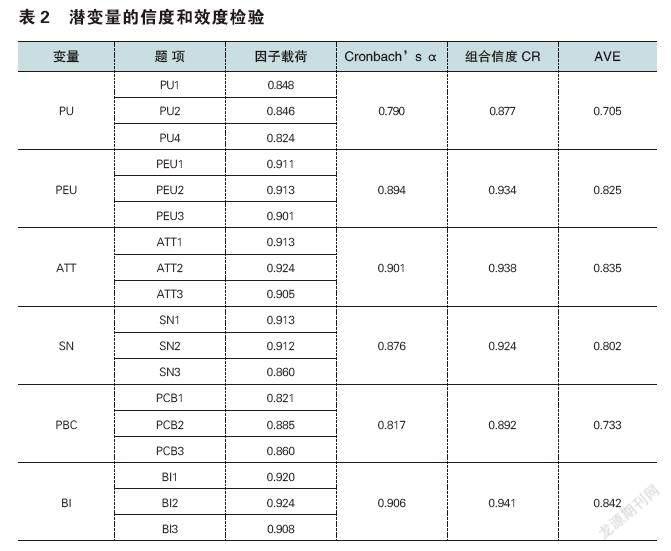
信效度检验用于保证问卷的准确性和稳定性。信度分析采用克隆巴赫系数(Cronbach’s α)和组合信度(composite reliability, CR)来评价。根据George等[4]的研究,Cronbach’s α的值大于0.6可接受。依据Fornell等[5]的研究,组合信度系数同样大于0.6,就可以接受。效度分析通常使用平均方差提取值(average variance extracted, AVE)来测度,当AVE大于0.5时表示潜变量收敛效度较好,测量比较准确。各潜变量的信度和效度结果见表2,这些结果表明该测量模型具有良好的收敛效度。
4.2 结果分析
我们用最大似然估計方法来估计3个结构模型。首先我们分析模型的拟合优度,考察比较适配指数(CFI),Tucker-lewis系数(TLI),渐进残差均方平方根(RMSEA)以及标准化残差均方根(SRMR)等拟合指标。模型拟合结果见表3。结果表明,除了模型1的RMSEA外,3个模型拟合指标均符合要求,模型拟合度较高。
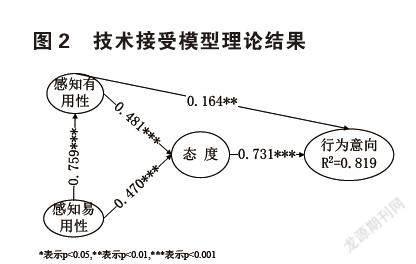
模型3的计算结果见图2。该模型解释了81.9%的行为意向协方差。ATT(β=0.731,p<0.01)和PU(β=0.164,p<0.05)对老年人接受自动驾驶有显著的积极影响。并且,ATT对行为意向的解释能力比PBC更强。PU和PEU对ATT都有积极影响,且PBC对PU影响显著。
模型2的计算结果见图3,该模型解释了76.4%的行为意向协方差。其中,行为态度(β=0.520,p<0.001)、主观规范(β=0.453,p<0.001)、感知行为控(β=0.436,p<0.001)对行为意向有显著正向影响。
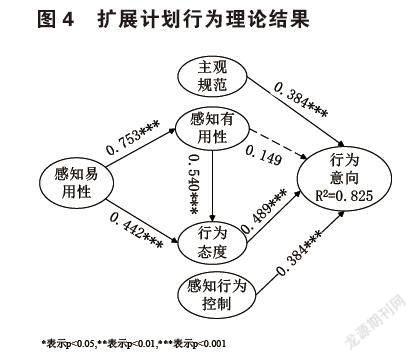
模型1的计算结果见图4,图中的实线表示因果关系在95%的显著水平上显著,虚线表示不显著。该模型解释了82.5%的行为意向协方差。
其中,态度(β=0.489,p<0.001)、主观规范(β=0.384,p<0.001)和感知行为控制(β=0.384,p<0.001)对老年人接受自动驾驶车辆有着显著影响,而感知有用性(β=0.149,p=0.058>0.05)对接受行为没有显著影响。
4.3 结果讨论
(1)标准的TAM解释了81.9%的行为意向协方差,标准的TPB解释了76.4%的行为意向协方差,而扩展的计划行为理论解释了82.5%的行为意向协方差。说明在解释老年人对自动驾驶汽车接受意向方面,标准的TAM比TPB能更好的能解释老年人对自动驾驶汽车接受的行为意向,解释行为意向方差增加了ΔR2=(81.9%-76.5%)=5.4%。而扩展的计划行为理论和技术接受模型的解释能力相当,解释行为意向方差仅仅增加了ΔR2=(82.5%-81.9%)=0.6%。扩展的计划行为理论比标准的计划行为理论的行为意向解释力更强,增加了ΔR2=(82.5%-76.5%)=6%。
(2)单独分析TAM和TPB。发现 SN、ATT、PBC、PU分别显著的影响了老年人对自动驾驶汽车的度。但在联合的计划行为理论模型中,PU(β=0.149,p=0.058>0.05)的影响变的不显著。说明在分析老年人对AV接受意向时,技术接受模型的因子受到计划行为理论因子的影响。
(3)在联合的计划行为理论中,SN和PCB具有同等的解释力,都解释了0.384的行为意向方差,行为态度解释了0.489的行为意向。说明老年人的行为态度对选择自动驾驶汽车的解释力比主观规范和感知行为控制都要强。
(4)PU和PEU对ATT的影响分别为0.442和0.540,影响显著。并且感知易用性(PEU)对感知有用性(PU)的影响为0.753。感知有用性(PU)和感知易用性(PEU)通过态度(ATT)对行为意向产生间接影响。
5 结束语
在解释老年人对自动驾驶汽车接受意愿方面,与标准的TAM和标准的TPB相比,扩展的计划行为理论解释力较强。在影响因素方面,在扩展的计划行为理论中,行为态度的影响最大,其次是主观规范和感知行为控制,而感知有用性对老年人接受自动驾驶的影响不显著。根据以上结论,可以通过让接受能力强的年轻人子女,或通过亲朋好友和邻里街坊的使用,从而来促进老年人对自动驾驶车辆的接受意愿。感知有用性和感知易用性对态度的影响显著。因此,可以通过提高自动驾驶汽车技术及服务质量,改善老年人的态度来促进其使用意愿。此外,可以对老年人进行相关的培训教育,提高老年人对自动驾驶车辆的认知和对智能手机的操作技能,来促进老年人对自动驾驶汽车的接受意愿。
参考文献:
[1]吴萌 黄 A. 特大城市老年人出行特征及相关因素分析——以上海市中心城为例 [J]. 城市规划学刊,2015,(02):93-101.
[2]AJZEN I. The theory of planned behavior [J]. Organizational Behavior and Human Decision Processes,1991,50(2):179-211.
[3]LANZINI P,KHAN S A. Shedding light on the psychological and behavioral determinants of travel mode choice: A meta-analysis [J]. Transportation Research Part F: Traffic Psychology and Behaviour,2017,48:13-27.
[4]GEORGE D,MALLERY P. SPSS for Windows Step by Step: A Simple Guide and Reference 12.0 update (5th Edition)[M]. SPSS for Windows Step by Step: A Simple Guide and Reference 12.0 update (5th Edition),2004.
[5]FORNELL C, LARCKER D F. Evaluating Structural Equation Models with Unobservable Variables and Measurement Error [J]. Journal of Marketing Research,2018,18(1):39-50.
猜你喜欢
财经问题研究(2016年7期)2016-12-26
软件导刊(2016年9期)2016-11-07
商(2016年27期)2016-10-17
商(2016年27期)2016-10-17
科学与财富(2016年28期)2016-10-14
科技视界(2016年20期)2016-09-29
商业经济研究(2016年14期)2016-09-14